Download as docx, pdf, or txt
You might also like
- Kyocera TA 4002 Service ManualDocument1,773 pagesKyocera TA 4002 Service ManualRenee93% (40)
- The New NormalDocument46 pagesThe New NormalMapapG100% (1)
- Automotive AcronymsDocument133 pagesAutomotive AcronymsadelinodiasNo ratings yet
- Simpson's 1/3 Rule of IntegrationDocument12 pagesSimpson's 1/3 Rule of Integrationap021100% (1)
- Self Replicating RobotsDocument5 pagesSelf Replicating Robotsbhava_siddhu326No ratings yet
- Self Healing RobotDocument16 pagesSelf Healing RobotKeerthana ENo ratings yet
- Dept of ME Seminar TemplateDocument17 pagesDept of ME Seminar TemplateKeerthana ENo ratings yet
- Modular RoboticsDocument17 pagesModular RoboticsFaaiz MohammadNo ratings yet
- A Review of Physics Simulators For Robotic ApplicationsDocument16 pagesA Review of Physics Simulators For Robotic ApplicationsHarshil NaikNo ratings yet
- Swarm Robots ReportDocument19 pagesSwarm Robots ReportAakritiNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1MahimaNo ratings yet
- Vikash Seminar ReportDocument31 pagesVikash Seminar ReportUpendra KumarNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1Nandyala ManasaNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1melady teraNo ratings yet
- R 08 Robots Page8Document8 pagesR 08 Robots Page8straf238No ratings yet
- Introduction To Robotics, Class Notes (UG Level) : June 2015Document19 pagesIntroduction To Robotics, Class Notes (UG Level) : June 2015Gayathri R HICET CSE STAFFNo ratings yet
- How To Make A Robot WalkDocument15 pagesHow To Make A Robot Walkadmer100% (1)
- Robotics Notes 1Document19 pagesRobotics Notes 1Dammalapati HarshavardhanNo ratings yet
- AVLib A Simulink Library For Multi-Agent Systems ResearchDocument7 pagesAVLib A Simulink Library For Multi-Agent Systems ResearchShafayat AbrarNo ratings yet
- Modular RoboticsDocument20 pagesModular RoboticsAlina MirelaNo ratings yet
- Biologically Inspired Design Framework For Robot in Dynamic Environments Using FramsticksDocument9 pagesBiologically Inspired Design Framework For Robot in Dynamic Environments Using FramsticksijbbjournalNo ratings yet
- An Underactuated Modular Robot For Testing Control AlgorithmsDocument7 pagesAn Underactuated Modular Robot For Testing Control AlgorithmsAlina MirelaNo ratings yet
- Robotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Document14 pagesRobotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Aalaa HasanNo ratings yet
- Collective Construction Using Lego Robots: Crystal Schuil, Matthew Valente, Justin Werfel, Radhika NagpalDocument2 pagesCollective Construction Using Lego Robots: Crystal Schuil, Matthew Valente, Justin Werfel, Radhika NagpalDayvson DiegoNo ratings yet
- Modular Robots Icra2010 WorkshopDocument121 pagesModular Robots Icra2010 Workshopwasin_kNo ratings yet
- Machine Learning in RoboticsDocument5 pagesMachine Learning in RoboticsEditor IJTSRDNo ratings yet
- 基于知识的卫星装配Document10 pages基于知识的卫星装配qweasdkawayiNo ratings yet
- Development of A Microcontroller Based Robotic ArmDocument10 pagesDevelopment of A Microcontroller Based Robotic ArmHus Forth CorrentyNo ratings yet
- Control of The Multi Agent Micro-Robotic PlatformDocument7 pagesControl of The Multi Agent Micro-Robotic PlatformmezianeNo ratings yet
- Space Robotics: Submitted by Anjana GopinathDocument31 pagesSpace Robotics: Submitted by Anjana GopinathChaitanya NaikNo ratings yet
- HOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics EducationDocument8 pagesHOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics Educationchoco bananaNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarNo ratings yet
- Cable Robot Deep Learning With Transfer Learning SpringerDocument20 pagesCable Robot Deep Learning With Transfer Learning SpringerIsmail LahlouNo ratings yet
- Mobile Robots That Learn To Navigate: Honours Year Project ReportDocument85 pagesMobile Robots That Learn To Navigate: Honours Year Project ReportUmer Farooq ShahNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzNo ratings yet
- Care2013 Submission 58Document6 pagesCare2013 Submission 58鄭志英No ratings yet
- Jrnal 4 1 62 66Document6 pagesJrnal 4 1 62 66Arnob TanjimNo ratings yet
- 2014 SIS OCboticsDocument8 pages2014 SIS OCboticsArchi DesignNo ratings yet
- Shekhawat 2020Document7 pagesShekhawat 2020Jeremiah PuaNo ratings yet
- Report For Mathwork Fileexchange PDFDocument29 pagesReport For Mathwork Fileexchange PDFShoaib chishty0% (1)
- Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewDocument12 pagesDeep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewRobert ChenNo ratings yet
- Reinforcement Learning For RobotDocument22 pagesReinforcement Learning For RobotSummer TriangleNo ratings yet
- Robotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewDocument13 pagesRobotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewHien Bui XuanNo ratings yet
- Design and Control of Two-Wheeled Self-Balancing Robot Using ArduinoDocument7 pagesDesign and Control of Two-Wheeled Self-Balancing Robot Using ArduinoNgoc AnhNo ratings yet
- On Solving The Inverse Kinematics Problem Using Neural NetworksDocument7 pagesOn Solving The Inverse Kinematics Problem Using Neural NetworksAlejandro CastilloNo ratings yet
- 2014 - Silva-Ortigoza Et Al. - Obstacle Avoidance Task For A Wheeled Mobile Robot - A Matlab-Simulink-Based Didactic ApplicationDocument24 pages2014 - Silva-Ortigoza Et Al. - Obstacle Avoidance Task For A Wheeled Mobile Robot - A Matlab-Simulink-Based Didactic ApplicationGerry GuadarramaNo ratings yet
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDocument6 pagesSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizNo ratings yet
- Objective & Outcome of RoboticsDocument3 pagesObjective & Outcome of RoboticsMechanicalNo ratings yet
- Roboearth ZweigleDocument9 pagesRoboearth ZweigleReem Ahmed Yousri ShahinNo ratings yet
- Web Based Technologies For Teaching and Using Molecul - 2002 - Fluid Phase EquilDocument9 pagesWeb Based Technologies For Teaching and Using Molecul - 2002 - Fluid Phase EquilAnonymous ypVNIINo ratings yet
- 5 Csiszar 20bcgswDocument6 pages5 Csiszar 20bcgswMEHMETNo ratings yet
- COE101-MODULE 1 IntroductionDocument6 pagesCOE101-MODULE 1 IntroductionOliver MedinaNo ratings yet
- Sciencedirect: A Process Demonstration Platform For Product Disassembly Skills TransferDocument6 pagesSciencedirect: A Process Demonstration Platform For Product Disassembly Skills Transfervincent BarreauNo ratings yet
- Self Healing Robots - Seminar ReportDocument33 pagesSelf Healing Robots - Seminar ReportVishnu Ravindran60% (10)
- A Novel Approach To Integrate Artificial Potential Field and Fuzzy Logic Into A Common Framework For Robots Autonomous NavigationDocument17 pagesA Novel Approach To Integrate Artificial Potential Field and Fuzzy Logic Into A Common Framework For Robots Autonomous NavigationMBADJOUN DanielNo ratings yet
- The Open Mechanical Engineering JournalDocument8 pagesThe Open Mechanical Engineering JournalSrinivas ReddyNo ratings yet
- Good 3Document15 pagesGood 3tanvir anwarNo ratings yet
- Robotics 1Document24 pagesRobotics 1Rahul RoyNo ratings yet
- Seminar Report On CyberneticsDocument67 pagesSeminar Report On CyberneticsSimmi JoshiNo ratings yet
- Implementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotDocument6 pagesImplementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotwendersoncsdepNo ratings yet
- EL-422 Robotics (Revised-2022)Document106 pagesEL-422 Robotics (Revised-2022)Yusra KhanNo ratings yet
- Swarm Robotics Design and ImplementationDocument9 pagesSwarm Robotics Design and ImplementationMUHAMMAD AMMARNo ratings yet
- Re Engineering Traditional Learning Model With Outcome Based Learning Curve Using Embedded Training LaboratoryDocument11 pagesRe Engineering Traditional Learning Model With Outcome Based Learning Curve Using Embedded Training LaboratoryEditor IJTSRDNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- LLM 1 GPTDocument12 pagesLLM 1 GPTPocho OrtizNo ratings yet
- Software Design Description TEMPLATEDocument20 pagesSoftware Design Description TEMPLATEZeus GanfallNo ratings yet
- Cambridge IGCSE: 0417/12 Information and Communication TechnologyDocument12 pagesCambridge IGCSE: 0417/12 Information and Communication Technologyxdybmmkx8wNo ratings yet
- Megger Data Sheet Model TORKEL900 DATA SHEETDocument6 pagesMegger Data Sheet Model TORKEL900 DATA SHEETlion100_saadNo ratings yet
- M Ashraf - Linux BasicsDocument2 pagesM Ashraf - Linux BasicsMindble SolutionsNo ratings yet
- Risk ConferenceDocument6 pagesRisk Conferencejunaid_libraNo ratings yet
- EFF Request For Judicial Notice in The Hard Drive Productions, Inc. v. Does 1-1495 Case.Document44 pagesEFF Request For Judicial Notice in The Hard Drive Productions, Inc. v. Does 1-1495 Case.Cashman Law Firm, PLLCNo ratings yet
- MRF 5 S 9100 NDocument16 pagesMRF 5 S 9100 NpankajNo ratings yet
- Format: Floating-Point ArithmeticDocument3 pagesFormat: Floating-Point ArithmeticAZKIYA ZAHRANo ratings yet
- Cod. 41 Wifi Alarm User ManualDocument35 pagesCod. 41 Wifi Alarm User ManualJoel MartinezNo ratings yet
- Shielded Vs Non Shielded Cables in 2400 V CircuitsDocument20 pagesShielded Vs Non Shielded Cables in 2400 V CircuitsJuan AraqueNo ratings yet
- Big Bay Bei Final Round 2021 (P5)Document15 pagesBig Bay Bei Final Round 2021 (P5)S1ice man100% (1)
- Mavic 3EDocument2 pagesMavic 3Ebigotes bigotonesNo ratings yet
- 16-Bit Romless Mcu: PQFP144 (28 X 28 MM)Document63 pages16-Bit Romless Mcu: PQFP144 (28 X 28 MM)katty cumbeNo ratings yet
- CMOS Cascode Current MirrorDocument10 pagesCMOS Cascode Current MirrorBinh NguyenNo ratings yet
- Account Number:: Hello..Document8 pagesAccount Number:: Hello..Sridhar SubramanianNo ratings yet
- Itunes DiagnosticsDocument2 pagesItunes Diagnosticsarviya972No ratings yet
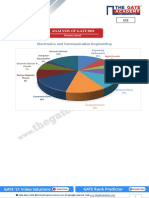
- Analysis of Gate 2021: Electronics and Communication EngineeringDocument11 pagesAnalysis of Gate 2021: Electronics and Communication EngineeringShivani Ekant YadavNo ratings yet
- Datasheet SmartSolar Charge Controller MPPT 250 60, 250 70, 250 85 & 250 100 ENDocument1 pageDatasheet SmartSolar Charge Controller MPPT 250 60, 250 70, 250 85 & 250 100 ENSINES France100% (1)
- KAVR Series - Manual PDFDocument214 pagesKAVR Series - Manual PDFtunghtdNo ratings yet
- LogDocument3 pagesLogJay LoNo ratings yet
- Research Paper On Mobile BankingDocument5 pagesResearch Paper On Mobile Bankingcaqllprhf100% (1)
- Passive Test 3Document4 pagesPassive Test 3INGERMARNo ratings yet
- Datacenter TransformationDocument44 pagesDatacenter TransformationFederico CandiaNo ratings yet
- JB QBC BS10Document41 pagesJB QBC BS10callmeeng.cm1No ratings yet