Download as pdf or txt
You might also like
- Wjec A2 Chemistry Study and Revision Guide PDFDocument125 pagesWjec A2 Chemistry Study and Revision Guide PDFPakorn WinayanuwattikunNo ratings yet
- The Higher TasteDocument128 pagesThe Higher TasteHari Chandana K100% (1)
- Science: Quarter 2 - Module 7: "Beneficial or Harmful?"Document20 pagesScience: Quarter 2 - Module 7: "Beneficial or Harmful?"Freya Joy Mercado - Santos91% (11)
- Reading Exercise 1Document4 pagesReading Exercise 1JumahirNo ratings yet
- Fire Rated Door CertificateDocument1 pageFire Rated Door Certificateabidch143No ratings yet
- Pump Selection and Application: Date Assigned: 6 December 2020 Date Due: 14 December 2020 Instructions To CandidatesDocument4 pagesPump Selection and Application: Date Assigned: 6 December 2020 Date Due: 14 December 2020 Instructions To CandidatesSelesteNo ratings yet
- Placement Brochure5Document7 pagesPlacement Brochure5Shubhojeet MazumdarNo ratings yet
- How GroundHog Works With MiningDocument15 pagesHow GroundHog Works With MiningrapidBizApps Pvt. LTDNo ratings yet
- Guest Internet Support (HSIA)Document1 pageGuest Internet Support (HSIA)Jann AnneNo ratings yet
- R5 Racing BookletDocument10 pagesR5 Racing BookletAnonymous bu1DPlu0No ratings yet
- Overvi Ewofassi Gnment: I Ct101Di SCR Et Emat Hemat I Csfori TDocument3 pagesOvervi Ewofassi Gnment: I Ct101Di SCR Et Emat Hemat I Csfori TESAUNo ratings yet
- Theuni Versi Tyofmi Ndanao: OF ReportsDocument4 pagesTheuni Versi Tyofmi Ndanao: OF ReportsAlexia DignosNo ratings yet
- Whitepaper - Rob - 10 Reasons Why Outsourcing FailsDocument9 pagesWhitepaper - Rob - 10 Reasons Why Outsourcing Failssmrithi mridhulNo ratings yet
- Abstract On Pilger HFS & Solution AnnealingDocument2 pagesAbstract On Pilger HFS & Solution AnnealingPrasenjit PuriNo ratings yet
- Ganesh Shinde CV-12Document3 pagesGanesh Shinde CV-12Ganesh ShindeNo ratings yet
- Strategic Management Full NotesDocument131 pagesStrategic Management Full Notes6038 Mugilan kNo ratings yet
- Chrdfi Nc.I NT Er Nat I Onalsemi Narwor Kshopf Ornon-Teachi Ngper Sonnelasgl Obalwor Ker SDocument2 pagesChrdfi Nc.I NT Er Nat I Onalsemi Narwor Kshopf Ornon-Teachi Ngper Sonnelasgl Obalwor Ker SRichelle PascorNo ratings yet
- Olivia Walkie Talkie Project FinalDocument14 pagesOlivia Walkie Talkie Project Finalapi-484979630No ratings yet
- Unit 3Document7 pagesUnit 3SIDDHESH WADEKARNo ratings yet
- 2011 Ford Fusion Instrument-ClusterDocument84 pages2011 Ford Fusion Instrument-Clustertgreen27602No ratings yet
- Secret Ar Yi Si DR Os - Lapena, Di Rect Orgener Aloftesda, Vi Si T Srptesdc - Bi Nangonanami Dstpandemi CDocument2 pagesSecret Ar Yi Si DR Os - Lapena, Di Rect Orgener Aloftesda, Vi Si T Srptesdc - Bi Nangonanami Dstpandemi COficiar BeverlyNo ratings yet
- How Africa Fits-Wps OfficeDocument17 pagesHow Africa Fits-Wps Officenamaralarry66No ratings yet
- Projectreport On Taxibooki Ngmanagement System: Panj Abuni Ver Si T Y, Chandi Gar HDocument59 pagesProjectreport On Taxibooki Ngmanagement System: Panj Abuni Ver Si T Y, Chandi Gar Hgm boiNo ratings yet
- 2.steering GearDocument15 pages2.steering GearMHasanNo ratings yet
- Lathe Machine OperationDocument5 pagesLathe Machine OperationHenokNo ratings yet
- GPT ChatDocument4 pagesGPT ChatCraig JamuNo ratings yet
- Case study-WPS OfficeDocument3 pagesCase study-WPS OfficeAri MuhdhofaNo ratings yet
- Module 3 - Educational TechnologyDocument19 pagesModule 3 - Educational TechnologyBuleloNo ratings yet
- Cosc 412 - Note ADocument35 pagesCosc 412 - Note AABUBAKARNo ratings yet
- Companyprofile TNXDocument1 pageCompanyprofile TNXJean SuarezNo ratings yet
- 7 Role PlayDocument6 pages7 Role PlayÌtz Pàvåñ HêrèNo ratings yet
- MAURILLO, C (IEng 167)Document2 pagesMAURILLO, C (IEng 167)Charlaine MaurilloNo ratings yet
- Swot and Pestle Analysis of Apple IncDocument4 pagesSwot and Pestle Analysis of Apple IncGANESWAR BARIKNo ratings yet
- Killing GroundsDocument23 pagesKilling GroundsSanberth ClaracayNo ratings yet
- Advert - Media MonitorDocument1 pageAdvert - Media MonitordashawnbryannNo ratings yet
- ch05 Antennas Transmission LinesDocument30 pagesch05 Antennas Transmission LinesForgames OnlyNo ratings yet
- Sid Ste. 2Document13 pagesSid Ste. 2Siddava BanneNo ratings yet
- Computer Project IT Series VIDocument2 pagesComputer Project IT Series VIDil NawazNo ratings yet
- MM Unit 2Document57 pagesMM Unit 2Spartan 117No ratings yet
- DI GI Talassi Gnment-3Document3 pagesDI GI Talassi Gnment-3Ebbili HarshaNo ratings yet
- SGP - Class Notes 3Document6 pagesSGP - Class Notes 3baishyaarnab27No ratings yet
- Software Risk Management SlidesDocument1 pageSoftware Risk Management SlidesKhuram ShahzadNo ratings yet
- Integrated Weed ManagementDocument10 pagesIntegrated Weed ManagementRaghaNo ratings yet
- Labour Turnover-WPS OfficeDocument3 pagesLabour Turnover-WPS OfficeMalvika PattnaikNo ratings yet
- Python Unit 1Document16 pagesPython Unit 1Jasleen KourNo ratings yet
- Part 2 Front Office Bms 3 All Topics Unit 2Document35 pagesPart 2 Front Office Bms 3 All Topics Unit 2poonam bhardwajNo ratings yet
- Exhibit Display Board TemplateDocument4 pagesExhibit Display Board Templateaneshkar09No ratings yet
- Library ManagementDocument15 pagesLibrary ManagementPRANAYNo ratings yet
- Smart Data Monitoring System For Power Loom Using IOTDocument6 pagesSmart Data Monitoring System For Power Loom Using IOTANANTHI KNo ratings yet
- Assignment On HRPDocument4 pagesAssignment On HRPeshuahlawatNo ratings yet
- DB-Labman LecturersDocument32 pagesDB-Labman LecturersEzeuko EmmanuelNo ratings yet
- MOHA Boiler Room ReportDocument6 pagesMOHA Boiler Room ReportBizuayehu GeroNo ratings yet
- Sintex Pwts-Am BrochureDocument4 pagesSintex Pwts-Am BrochureAshish TamangNo ratings yet
- EasyScan Product SheetDocument6 pagesEasyScan Product SheetFederico LucidiNo ratings yet
- Ernesto TR CVDocument1 pageErnesto TR CVErnestoNo ratings yet
- Fundamental Analysis and It Use in Crypto 01 Ilovepdf CompressedDocument13 pagesFundamental Analysis and It Use in Crypto 01 Ilovepdf Compressedomer khanNo ratings yet
- EST MP - RemovedDocument5 pagesEST MP - RemovedJAYESHNo ratings yet
- BRK - 2Document2 pagesBRK - 2sigroofingandbuildingNo ratings yet
- TrjemahanDocument2 pagesTrjemahanViraNo ratings yet
- IMA Learning - CurveDocument3 pagesIMA Learning - CurveRhea ZenuNo ratings yet
- AssemblyDocument3 pagesAssemblySunil PawarNo ratings yet
- Asset Management SystemDocument1 pageAsset Management SystemSooraj NaikNo ratings yet
- Governmentcol L Egeofengi Neer I NG, Nagpur: DatabasemanagementsystemDocument2 pagesGovernmentcol L Egeofengi Neer I NG, Nagpur: DatabasemanagementsystemVishal KesharwaniNo ratings yet
- FP IIDocument15 pagesFP IIHabeshan KdramafanNo ratings yet
- BMEF19M019 - M.zeeshan Mechanics of MaterialDocument6 pagesBMEF19M019 - M.zeeshan Mechanics of MaterialZeeshan YaminNo ratings yet
- 1606f29793ea7d - LatofexidemadefiDocument2 pages1606f29793ea7d - LatofexidemadefiHassan allaNo ratings yet
- Arduino Project Report - Academic Project: November 2018Document21 pagesArduino Project Report - Academic Project: November 2018Hassan allaNo ratings yet
- State City Address AlabamaDocument9 pagesState City Address AlabamaHassan allaNo ratings yet
- The Art of The Two TowersDocument102 pagesThe Art of The Two TowersHassan allaNo ratings yet
- A Review On Spider Robotic SystemDocument7 pagesA Review On Spider Robotic SystemHassan allaNo ratings yet
- Ntroduction TO Obot AND OboticsDocument12 pagesNtroduction TO Obot AND OboticsHassan allaNo ratings yet
- Age - First - The - of - Events - Madness - March - Earth - Middle 112521-/ 23 / 03 / 2022 / TorwpDocument12 pagesAge - First - The - of - Events - Madness - March - Earth - Middle 112521-/ 23 / 03 / 2022 / TorwpHassan allaNo ratings yet
- The Art of The Fellowship of The RingDocument102 pagesThe Art of The Fellowship of The RingHassan alla0% (1)
- The Art of The Lord of The Rings Part1Document27 pagesThe Art of The Lord of The Rings Part1Hassan alla100% (1)
- Smart Power Integrated Circuit For Piezoceramic-Based MicrorobotDocument5 pagesSmart Power Integrated Circuit For Piezoceramic-Based MicrorobotHassan allaNo ratings yet
- Experiment No4 HMIDocument7 pagesExperiment No4 HMIHassan allaNo ratings yet
- Experiment No2 HMIDocument10 pagesExperiment No2 HMIHassan allaNo ratings yet
- Cat C175-16 - Jul 2010Document6 pagesCat C175-16 - Jul 2010Lei YinNo ratings yet
- The Great El Ni o of 1789-93 and Its Global Consequences: Reconstructing An Extreme Climate Event in World Environmental HistoryDocument25 pagesThe Great El Ni o of 1789-93 and Its Global Consequences: Reconstructing An Extreme Climate Event in World Environmental HistoryVictoria PadillaNo ratings yet
- Maximizing The Sharpe RatioDocument3 pagesMaximizing The Sharpe RatioDat TranNo ratings yet
- SItx 40516prepare Meat DishesDocument9 pagesSItx 40516prepare Meat DishesTikaram GhimireNo ratings yet
- Synergy Shuttle ConveyorDocument5 pagesSynergy Shuttle ConveyorTamal Tanu RoyNo ratings yet
- HRUI POE Switch Catalog2020Document8 pagesHRUI POE Switch Catalog2020delapenar843No ratings yet
- Mechanisms of Fracture in MetalsDocument10 pagesMechanisms of Fracture in Metalsaap1No ratings yet
- KrisbowDocument12 pagesKrisbowGhirah ArrahmanNo ratings yet
- Finals 1: Ritchelle G. Reyes Mr. Maximo Muldong 2.2 Bsa-Cy2 Management Science WED. 5-7 PMDocument7 pagesFinals 1: Ritchelle G. Reyes Mr. Maximo Muldong 2.2 Bsa-Cy2 Management Science WED. 5-7 PMRavena ReyesNo ratings yet
- Crest Definition - Google Search OkDocument1 pageCrest Definition - Google Search Okh4wkwzbtpfNo ratings yet
- Happiness - Mark MansonDocument26 pagesHappiness - Mark MansonJake100% (3)
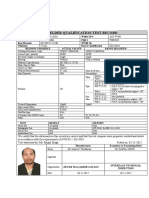
- Wqt-1-13-W-1-3g-Smaw-Alclad-Aws D1.1Document1 pageWqt-1-13-W-1-3g-Smaw-Alclad-Aws D1.1Rejoy babyNo ratings yet
- Abdullah JavedDocument8 pagesAbdullah JavedTahir MahmoodNo ratings yet
- 4) AC 65-15 Airframe HandbookDocument620 pages4) AC 65-15 Airframe HandbookWarren Dhez FortunatoNo ratings yet
- Abie Construction Limited: Retaining Wall Analysis (Bs 8002:1994)Document12 pagesAbie Construction Limited: Retaining Wall Analysis (Bs 8002:1994)Eric OwusuNo ratings yet
- Price - The Fun Palace Cedric PriceDocument20 pagesPrice - The Fun Palace Cedric PricewhatsinausernameNo ratings yet
- 10 MCQDocument40 pages10 MCQPragnesh Parmar0% (1)
- Stepan Formulation 1201Document2 pagesStepan Formulation 1201Mohamed AdelNo ratings yet
- Case SMCDocument2 pagesCase SMCMaridel LigsonNo ratings yet
- Lecture 7 Adjusted Present ValueDocument19 pagesLecture 7 Adjusted Present ValuePraneet Singavarapu100% (1)
- H-3870-1 - Adverse Claims, Protests, Contests, and AppealsDocument67 pagesH-3870-1 - Adverse Claims, Protests, Contests, and AppealsLesterNo ratings yet
- Pnabh 020Document76 pagesPnabh 020MAHER FAHADNo ratings yet
- Flow in Pipe: Characteristic LengthDocument9 pagesFlow in Pipe: Characteristic Lengthguapo93No ratings yet
- Goulds e-NSC Series: High Flexibility, Heavy Duty End Suction Pumps For Building Services, Public Utilities and IndustryDocument23 pagesGoulds e-NSC Series: High Flexibility, Heavy Duty End Suction Pumps For Building Services, Public Utilities and IndustryFARAZamuNo ratings yet