Download as pdf or txt
You might also like
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Document3 pagesK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaNo ratings yet
- Mechatronic Systems Design: Mohammed AhmedDocument54 pagesMechatronic Systems Design: Mohammed AhmedShivam Kumar ShrivastavaNo ratings yet
- Modeling and Simulation PrinciplesDocument28 pagesModeling and Simulation PrinciplesPraveen D JadhavNo ratings yet
- System Modeling: PRESSENTED BY:-Er. Saurabh MalpotraDocument36 pagesSystem Modeling: PRESSENTED BY:-Er. Saurabh MalpotraCr ZyNo ratings yet
- Mechatronics Course SyllabusDocument17 pagesMechatronics Course Syllabusnikhilrane91_7522800No ratings yet
- Mechanotrix 1Document37 pagesMechanotrix 1Mansif HossainNo ratings yet
- LEC 06 - 07 Mechatronics Systems and ApplicationsDocument26 pagesLEC 06 - 07 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Computer Simulation-and-ModelingDocument12 pagesComputer Simulation-and-ModelingRohit AcharyaNo ratings yet
- Unit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGNDocument8 pagesUnit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGN9740177035100% (1)
- 03 Lec Model - Based.designDocument31 pages03 Lec Model - Based.designmujtabaiftikhar156No ratings yet
- References: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopDocument30 pagesReferences: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopJay MenonNo ratings yet
- Chapter 1Document20 pagesChapter 1Abiyot egataNo ratings yet
- PB Modelling of Physical Systems FinalDocument56 pagesPB Modelling of Physical Systems FinalKhristilera RodriguezNo ratings yet
- Key Elements of MechatronicsDocument14 pagesKey Elements of Mechatronicsmatininamdar50% (2)
- Mechatronics Key Elements Information System: Modeling and SimulationDocument2 pagesMechatronics Key Elements Information System: Modeling and Simulation9740177035No ratings yet
- Simulation BasicsDocument94 pagesSimulation Basicspammy313100% (1)
- BMMI Unit 1 - Session 1Document18 pagesBMMI Unit 1 - Session 1Yashi SinghNo ratings yet
- Mechatronics ME5007Document5 pagesMechatronics ME5007Kalum ChandraNo ratings yet
- Steady State Co Simulation With Digsilent Programacion C DSL DLLDocument6 pagesSteady State Co Simulation With Digsilent Programacion C DSL DLLDavid Jose Poma GuillenNo ratings yet
- Introduction To Mechatronics SystemDocument8 pagesIntroduction To Mechatronics SystemSomalia WadankeygaNo ratings yet
- Lecture 1Document52 pagesLecture 1Dimuth S. PeirisNo ratings yet
- BATC602 Business Simulation - F2F 2Document43 pagesBATC602 Business Simulation - F2F 2Jai VatsNo ratings yet
- MS IntroductionDocument5 pagesMS Introductionharisree t vNo ratings yet
- Mechatronics UNIT-1Document82 pagesMechatronics UNIT-1bhagavanNo ratings yet
- Introduction To Mechatronics: Lecture #1Document44 pagesIntroduction To Mechatronics: Lecture #1Mohammed ZainNo ratings yet
- Unit 5Document5 pagesUnit 5CAD With RaoNo ratings yet
- FACULTY OF LAW PAST QUESTIONS 2019 2020 Till Date. (Compiled by Ola of Canada)Document12 pagesFACULTY OF LAW PAST QUESTIONS 2019 2020 Till Date. (Compiled by Ola of Canada)Ibidun TobiNo ratings yet
- Design of Mechatronics System QBDocument14 pagesDesign of Mechatronics System QBChandni DayakarNo ratings yet
- LEC 08-10 - Mechatronics Systems and ApplicationsDocument29 pagesLEC 08-10 - Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Aircraft Mathematical ModelDocument44 pagesAircraft Mathematical Modelkathan Irish RNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Introduction To MechatronicsDocument150 pagesIntroduction To MechatronicsAdebola oluwadamilare prosperNo ratings yet
- Time 1+2Document82 pagesTime 1+2جلال عواد كاظم جودةNo ratings yet
- Unit 2 - Software ArchitectureDocument12 pagesUnit 2 - Software ArchitectureLucky KanatheNo ratings yet
- LEC 02 - 03 Mechatronics Systems and ApplicationsDocument24 pagesLEC 02 - 03 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- SnS-SD-02!3!10 Modeling of Dynamics SystemsDocument25 pagesSnS-SD-02!3!10 Modeling of Dynamics Systemspd_orleansNo ratings yet
- University of Gondar: System Modeling and SimulationDocument30 pagesUniversity of Gondar: System Modeling and SimulationDag TNo ratings yet
- MEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignDocument26 pagesMEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignmarbonfNo ratings yet
- 01 - System SimulationDocument20 pages01 - System SimulationMuda SafarandiNo ratings yet
- Control MA All Slide in OneDocument209 pagesControl MA All Slide in One16117 GOURAB SAHANo ratings yet
- Meca 1.0 IntroductionDocument36 pagesMeca 1.0 IntroductionInes99No ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- Courses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Document20 pagesCourses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Vaibhav SinghNo ratings yet
- Chapter01 - Introduction To Control SystemDocument9 pagesChapter01 - Introduction To Control SystemNdidiamaka Nwosu AmadiNo ratings yet
- Design of Mechatronics: Lecture # 01 Introduction To MechatronicsDocument39 pagesDesign of Mechatronics: Lecture # 01 Introduction To MechatronicsCr ZyNo ratings yet
- Introduction To Dynamic System ModellingDocument19 pagesIntroduction To Dynamic System Modellingk_472894540No ratings yet
- Active SuspensionDocument6 pagesActive SuspensionSandor CleganeNo ratings yet
- PE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Document76 pagesPE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Charlton S.InaoNo ratings yet
- System Simulation: SolutionDocument6 pagesSystem Simulation: Solutionpreraksoni001No ratings yet
- Automatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin HoDocument21 pagesAutomatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin Ho3lok 3lNo ratings yet
- Mechatronics: Slovak University of TechnologyDocument9 pagesMechatronics: Slovak University of TechnologyRosiana RahmaNo ratings yet
- Introduction To Control SystemsDocument47 pagesIntroduction To Control SystemsMih Sy Santos-SilvaNo ratings yet
- Digitiilis Rendszerek 6S Sziimit6Gtp Architekttiriik I.: Veszprcmi Egyetem, Miiszaki Informatika SzakDocument33 pagesDigitiilis Rendszerek 6S Sziimit6Gtp Architekttiriik I.: Veszprcmi Egyetem, Miiszaki Informatika SzakBlazsNo ratings yet
- Sigmetrics08 Control PDFDocument31 pagesSigmetrics08 Control PDFyalllikNo ratings yet
- Chapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextDocument39 pagesChapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextRahul AshokNo ratings yet
- Business Process Modeling (BPM)Document4 pagesBusiness Process Modeling (BPM)Masroor Ahmed SiddiqiNo ratings yet
- Tools of Structure AnalysisDocument17 pagesTools of Structure AnalysisGutsyche SecillanoNo ratings yet
- 01-Introduction To Control SystemsDocument14 pages01-Introduction To Control SystemsAhmed JouleNo ratings yet
- 259 - Lecturer NotvfvvervrevDocument81 pages259 - Lecturer NotvfvvervrevBijay KumarNo ratings yet
- Aspen Hysys SimulationDocument5 pagesAspen Hysys SimulationEngr Mohammad FarhanNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Introduction To Mechatronics and Mechatronics in Real Life: Mariya Popovchenko 3 April 2006Document22 pagesIntroduction To Mechatronics and Mechatronics in Real Life: Mariya Popovchenko 3 April 2006RaghulNo ratings yet
- ENT 416-3-Engineering Design ProcessDocument31 pagesENT 416-3-Engineering Design ProcessRaghulNo ratings yet
- Unit 5: Learner Characteristics and Motivation: ContributorDocument9 pagesUnit 5: Learner Characteristics and Motivation: ContributorRaghulNo ratings yet
- Faculty of Engineering Ain Shams University: MDP: MechatronicsDocument43 pagesFaculty of Engineering Ain Shams University: MDP: MechatronicsRaghulNo ratings yet
- Assignment - 2: USE Normalization Process To Design Efficient and Functional DatabasesDocument1 pageAssignment - 2: USE Normalization Process To Design Efficient and Functional DatabasesRaghulNo ratings yet
- Hello!: I Am KnightfoxDocument16 pagesHello!: I Am KnightfoxRaghulNo ratings yet
- LM Me6511 DL Mech V QBDocument78 pagesLM Me6511 DL Mech V QBRaghulNo ratings yet
- Induction Generator and Synchronous Induction Motor: Presented By: Namani Srilahari Pavithran SelvamDocument16 pagesInduction Generator and Synchronous Induction Motor: Presented By: Namani Srilahari Pavithran SelvamRaghulNo ratings yet
- Servall Engineering Works PVT LTDDocument7 pagesServall Engineering Works PVT LTDRaghulNo ratings yet
- CUCET Question PaperDocument17 pagesCUCET Question PaperTapan SharmaNo ratings yet
- SDH Multiplexing BY: Tx-I Faculty Alttc, GZBDocument57 pagesSDH Multiplexing BY: Tx-I Faculty Alttc, GZBAjay Dagar100% (1)
- Distribution of Experiments (RU-23)Document2 pagesDistribution of Experiments (RU-23)alifarafatbiplobyNo ratings yet
- FluidsDocument1 pageFluidsevil geniusNo ratings yet
- Wpa Supp ChangeLogDocument39 pagesWpa Supp ChangeLogTạ NguyênNo ratings yet
- Convergence of Random Variables - WikipediaDocument17 pagesConvergence of Random Variables - Wikipediasandeep aNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document19 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Josué Abel Mamani RevillaNo ratings yet
- Introduction To Internal Combustion Engines: Asst. Prof. Vishnu SankarDocument57 pagesIntroduction To Internal Combustion Engines: Asst. Prof. Vishnu SankarMohammad Ishfaq BhatNo ratings yet
- Object Oriented Software Engineering 3rd Edition 614 817Document204 pagesObject Oriented Software Engineering 3rd Edition 614 817JUAN ABEL CALLUPE CUEVANo ratings yet
- Technical Databook TaurusDocument21 pagesTechnical Databook TaurusRohmat SupriyadiNo ratings yet
- RNC6900 UMTS - Cell Dynamic Shutdown AligorithmDocument25 pagesRNC6900 UMTS - Cell Dynamic Shutdown AligorithmAmanANo ratings yet
- Not Recommended For New Design: Parallel Port Button HolderDocument2 pagesNot Recommended For New Design: Parallel Port Button HolderSaasiNo ratings yet
- MPR (22446) ManualDocument31 pagesMPR (22446) Manualsiddiquimuzammil876No ratings yet
- 2.3 - The Factor Theorem Math 30-1Document14 pages2.3 - The Factor Theorem Math 30-1Math 30-1 EDGE Study Guide Workbook - by RTD LearningNo ratings yet
- Sample Question Paper - Object Oriented Programming-12063Document4 pagesSample Question Paper - Object Oriented Programming-12063amit_t4210% (1)
- Generalized Fierz IdentitiesDocument18 pagesGeneralized Fierz Identitieszcapg17No ratings yet
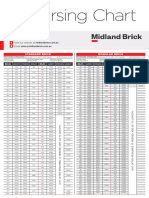
- Midland Brick Coursing ChartDocument2 pagesMidland Brick Coursing ChartMichael Slater100% (1)
- CMD-105 - Migrating Your CONTROL-M Environment To The Latest VersionDocument37 pagesCMD-105 - Migrating Your CONTROL-M Environment To The Latest Versionsam33961No ratings yet
- BS en 10003-2-1995 (1998)Document14 pagesBS en 10003-2-1995 (1998)Sainath AmudaNo ratings yet
- Fall 2022-2023 - Engineering Management - Chapter 5 - Transportation ModelDocument68 pagesFall 2022-2023 - Engineering Management - Chapter 5 - Transportation ModelShahriar KabirNo ratings yet
- Lorentz Pump ManualDocument16 pagesLorentz Pump ManualGirish OniyilNo ratings yet
- Modeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersDocument7 pagesModeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersLucas BomfimNo ratings yet
- 2023 PDFDocument12 pages2023 PDFDevesh Kumar PandeyNo ratings yet
- Revision Grade 7Document10 pagesRevision Grade 7Yousaf SaleemNo ratings yet
- Control M Interview QuestionsDocument1 pageControl M Interview QuestionsNigam PatelNo ratings yet
- Bpe300 Um enDocument37 pagesBpe300 Um encaioalmeida492No ratings yet
- Villanuva, A, ElecsDocument25 pagesVillanuva, A, ElecsAaron VillanuevaNo ratings yet
- Introduction To Data Analytics For Business - AnswersDocument8 pagesIntroduction To Data Analytics For Business - AnswersShabaan HossainNo ratings yet