Download as pdf or txt
You might also like
- BlockchainDocument14 pagesBlockchainBlogWormNo ratings yet
- Skoda Specific Quality Requirement v3Document24 pagesSkoda Specific Quality Requirement v3Yo GoldNo ratings yet
- DocumentDocument107 pagesDocumentdileeppatraNo ratings yet
- Anti Theft Device: Pir SensorDocument19 pagesAnti Theft Device: Pir SensorDevi sree Reddy MattaNo ratings yet
- Micro Project ETIDocument12 pagesMicro Project ETIAffan KhanNo ratings yet
- Iot Lab Manual 2Document81 pagesIot Lab Manual 2SuryaNo ratings yet
- Um GpsDocument7 pagesUm GpsDNo ratings yet
- Objective: Ce222793 - Psoc 6 Mcu: Motion Sensor (Rtos)Document11 pagesObjective: Ce222793 - Psoc 6 Mcu: Motion Sensor (Rtos)Ashwin MahoneyNo ratings yet
- ESP-WROOM-32 Datasheet: Espressif SystemsDocument26 pagesESP-WROOM-32 Datasheet: Espressif SystemsChanchai SrisutamNo ratings yet
- Upload 00064874 1653551341842Document17 pagesUpload 00064874 1653551341842Karl SturausNo ratings yet
- Esp32-Wrover Datasheet enDocument26 pagesEsp32-Wrover Datasheet enKhoa NgoNo ratings yet
- WiFi - ESP32-WROVER-IDocument26 pagesWiFi - ESP32-WROVER-Igeisselreiter.evoNo ratings yet
- Department of Technical EducationDocument12 pagesDepartment of Technical EducationDinesh NNo ratings yet
- Reflecting SensorDocument6 pagesReflecting Sensorsrc e-solutionsNo ratings yet
- Human Detection Robot Using PIR SensorDocument16 pagesHuman Detection Robot Using PIR SensorAnuj TripathiNo ratings yet
- Robotics Sensors Kit: Starting WithDocument7 pagesRobotics Sensors Kit: Starting WithfsdfNo ratings yet
- An633 PDFDocument86 pagesAn633 PDFdhilaNo ratings yet
- An633 PDFDocument86 pagesAn633 PDFdhilaNo ratings yet
- Chapter 3Document19 pagesChapter 3MUBARAK RAHAMAN HNo ratings yet
- Motion Detection System: Intruders Counter System With Signal InformationDocument17 pagesMotion Detection System: Intruders Counter System With Signal InformationAhmed M HasanNo ratings yet
- Esp32 WroverDocument23 pagesEsp32 WroverDenis AkshincevNo ratings yet
- Esp32-Wroom-32 Datasheet enDocument27 pagesEsp32-Wroom-32 Datasheet enyeetNo ratings yet
- Remote Token Display and Sound System: AbstractDocument7 pagesRemote Token Display and Sound System: AbstractmukundsricharanNo ratings yet
- ESP-WROOM-32D/ESP32-WROOM-32U Datasheet: Espressif SystemsDocument25 pagesESP-WROOM-32D/ESP32-WROOM-32U Datasheet: Espressif SystemsVictor Hernandez MedinaNo ratings yet
- 102RRo76Q5s1R1120 PDFDocument5 pages102RRo76Q5s1R1120 PDFPallavi PatilNo ratings yet
- Wireless E-Jacket For Multiparameter Biophysical Monitoring and Telemedicine ApplicationsDocument5 pagesWireless E-Jacket For Multiparameter Biophysical Monitoring and Telemedicine ApplicationsKhrla NRsydhIstqmhNo ratings yet
- Missial DictactionDocument13 pagesMissial DictactionMusthafa ThandottilNo ratings yet
- Pcan-Gps: User ManualDocument38 pagesPcan-Gps: User ManualKrum KashavarovNo ratings yet
- Implementation of Industrial Security System Using Motion Estimation and Visual IdentificationDocument3 pagesImplementation of Industrial Security System Using Motion Estimation and Visual IdentificationmirzaNo ratings yet
- Iot 1Document16 pagesIot 1Bhavana 2nd yearNo ratings yet
- Lab 7Document8 pagesLab 7zagarzusemNo ratings yet
- Esp32-Wroom-32se Datasheet enDocument26 pagesEsp32-Wroom-32se Datasheet enWesllen Dias SouzaNo ratings yet
- Esp32 Wrover B Datasheet en 1384674Document28 pagesEsp32 Wrover B Datasheet en 1384674George BintarchasNo ratings yet
- Tanformer Technical PaperDocument6 pagesTanformer Technical PaperAnjanareddy SettipalliNo ratings yet
- Sensors: High Frequency Sampling of TTL Pulses On A Raspberry Pi For Diffuse Correlation Spectroscopy ApplicationsDocument14 pagesSensors: High Frequency Sampling of TTL Pulses On A Raspberry Pi For Diffuse Correlation Spectroscopy ApplicationsEdgar VelaNo ratings yet
- Esp32-Solo-1 Datasheet enDocument26 pagesEsp32-Solo-1 Datasheet enSütő László BalázsNo ratings yet
- Chapter 3Document8 pagesChapter 3Jayanth ReddyNo ratings yet
- Report 1 WirelessDocument14 pagesReport 1 WirelessdawdaNo ratings yet
- CapSense Proximity DesignDocument12 pagesCapSense Proximity Design99SUPERDOG99No ratings yet
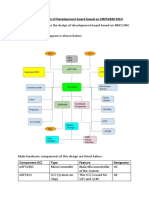
- Design Document of Development Board Based On NRF52840 MCUDocument8 pagesDesign Document of Development Board Based On NRF52840 MCUSmart SaadNo ratings yet
- HC-SR501 PIR Sensor - ENDocument24 pagesHC-SR501 PIR Sensor - ENSanti MartínNo ratings yet
- Esp32 Wrover B Datasheet enDocument27 pagesEsp32 Wrover B Datasheet enMonse CabalNo ratings yet
- Hall Sensor UserManualDocument2 pagesHall Sensor UserManualAldaz JacomeNo ratings yet
- Gps Arduino CodingDocument10 pagesGps Arduino Codingstephen otienoNo ratings yet
- Research Paper GPS Based Voice Alert System For The BlindDocument5 pagesResearch Paper GPS Based Voice Alert System For The BlindVenkata RatnamNo ratings yet
- Radar SystemDocument19 pagesRadar SystemVishal BharatiNo ratings yet
- Obstacle Detecting Wireless Robot1Document10 pagesObstacle Detecting Wireless Robot1Prabhakar DasNo ratings yet
- RPM Measurement (Tachometer)Document10 pagesRPM Measurement (Tachometer)19E45A0229 SDESEEENo ratings yet
- Esp-Wroom-32 Datasheet enDocument22 pagesEsp-Wroom-32 Datasheet enmaxmaiaNo ratings yet
- BBC Micro:bit v2: Please See For Latest UpdatesDocument10 pagesBBC Micro:bit v2: Please See For Latest UpdatesscosminNo ratings yet
- Esp-32 Datasheet PDFDocument26 pagesEsp-32 Datasheet PDFMohsin KhanNo ratings yet
- Pan and Tilt ControlDocument6 pagesPan and Tilt Controlziafat shehzadNo ratings yet
- Tsi Eb-500 PDFDocument12 pagesTsi Eb-500 PDFItalo MauricioNo ratings yet
- Manual Hardware Osciloscopio SaintsmartDocument17 pagesManual Hardware Osciloscopio SaintsmartEsteban Besso PianettoNo ratings yet
- Chapter 03Document8 pagesChapter 03Rakshith GowdaNo ratings yet
- Assignment On Numerical RelayDocument3 pagesAssignment On Numerical RelaydinukaeeNo ratings yet
- Esp32 Wroom 32dDocument24 pagesEsp32 Wroom 32dRazwan ali saeedNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Strength Characteristics of Soil Fly Ash Mixtures Reinforced With Randomly Oriented Polypropylene FibersDocument6 pagesStrength Characteristics of Soil Fly Ash Mixtures Reinforced With Randomly Oriented Polypropylene FibersAngelo RubiaNo ratings yet
- Effect of Calcium Addition at High Temperature On Fly Ash's Activation CharacterDocument4 pagesEffect of Calcium Addition at High Temperature On Fly Ash's Activation CharacterAngelo RubiaNo ratings yet
- Yangyang2011 PDFDocument5 pagesYangyang2011 PDFAngelo RubiaNo ratings yet
- Effect of Fly Ash On Self-Healing of Cracks in Concrete: 2018 Moratuwa Engineering Research Conference (Mercon)Document6 pagesEffect of Fly Ash On Self-Healing of Cracks in Concrete: 2018 Moratuwa Engineering Research Conference (Mercon)Angelo RubiaNo ratings yet
- Zhaojunmei2011 PDFDocument3 pagesZhaojunmei2011 PDFAngelo RubiaNo ratings yet
- Fifth Generation (5G) Wireless Technology "Revolution in Telecommunication"Document7 pagesFifth Generation (5G) Wireless Technology "Revolution in Telecommunication"Angelo RubiaNo ratings yet
- MOD 3 - HubsDocument36 pagesMOD 3 - HubsMiranda alekNo ratings yet
- Architecture School-Major One PortfolioDocument27 pagesArchitecture School-Major One PortfolioMichael HoehnNo ratings yet
- Formadora PMC1002Document2 pagesFormadora PMC1002superspifNo ratings yet
- Instructions PDFDocument79 pagesInstructions PDFhexapodo2No ratings yet
- Epm240mini Voting PDFDocument28 pagesEpm240mini Voting PDFZakwan WanNo ratings yet
- TSME Bro en 3606-7418-12 v1300 96dpiDocument18 pagesTSME Bro en 3606-7418-12 v1300 96dpiBelahcen AmineNo ratings yet
- HSE Format-AramcoDocument3 pagesHSE Format-AramcoMohammad BasitNo ratings yet
- PT. Biovalmed - HAIER - Type DW-25L92 (Freezer)Document2 pagesPT. Biovalmed - HAIER - Type DW-25L92 (Freezer)Medika AntapaniNo ratings yet
- Mina CrissDocument5 pagesMina CrissStefino SouwNo ratings yet
- Centillion 1200N Atm Switch User Manual: Broadband STPDocument256 pagesCentillion 1200N Atm Switch User Manual: Broadband STPhungpm2013No ratings yet
- Pre-Installation Manual: Discovery RF180Document124 pagesPre-Installation Manual: Discovery RF180Jesús ValeroNo ratings yet
- Jadual Induk BKT - Peperiksaan Diploma - Sijil Bagi Sesi Julai - Disember 2019 - 2.10Document8 pagesJadual Induk BKT - Peperiksaan Diploma - Sijil Bagi Sesi Julai - Disember 2019 - 2.10Arthur ArwinNo ratings yet
- Jowa Odme Cleantoil 9000Document6 pagesJowa Odme Cleantoil 9000CRIS SEDANTO0% (1)
- Employee Creation and Post MappingDocument8 pagesEmployee Creation and Post MappingAtisha ChhajedNo ratings yet
- JDS-G173 3Document8 pagesJDS-G173 3FCP PUNEKARNo ratings yet
- Scientech 2801: PAM, PPM, PWM and Line Coding TechniquesDocument2 pagesScientech 2801: PAM, PPM, PWM and Line Coding Techniquesعلاء حسينNo ratings yet
- NDBDocument2 pagesNDBShafiq RosmanNo ratings yet
- Laser Z Axis AutofocusDocument2 pagesLaser Z Axis Autofocusdane05No ratings yet
- Classification of The Different Types of Computers Based On Their Sizes and FunctionalitiesDocument1 pageClassification of The Different Types of Computers Based On Their Sizes and FunctionalitiesJaneth Colas Dela Costa0% (1)
- Microprocessors and InterfacingDocument125 pagesMicroprocessors and InterfacingRaja SekharNo ratings yet
- 2006-2024 Mopar Storage Battery BLH7F001AA - Mopar EstoresDocument15 pages2006-2024 Mopar Storage Battery BLH7F001AA - Mopar EstoresHector MercadoNo ratings yet
- Philippe Morel, From E-Factory To Ambient Factory Morel (GameSetMatchII TU Delft 2006)Document9 pagesPhilippe Morel, From E-Factory To Ambient Factory Morel (GameSetMatchII TU Delft 2006)Philippe Morel100% (1)
- Merry Fisher CijeneDocument1 pageMerry Fisher CijeneIvanKonjevicNo ratings yet
- Search Engine OptimizationDocument17 pagesSearch Engine Optimizationruchi goelNo ratings yet
- Speedwayr Installation and Operations GuideDocument93 pagesSpeedwayr Installation and Operations GuideAditya Dees AntargataNo ratings yet
- EMBSIN 281 G - Traductor Pentru Masurarea Factorului de Putere (Cos Phi)Document1 pageEMBSIN 281 G - Traductor Pentru Masurarea Factorului de Putere (Cos Phi)Ieremeiov VladimirNo ratings yet
- Franchise Expression of Interest Form: Personal DataDocument2 pagesFranchise Expression of Interest Form: Personal DataRafael BalloriNo ratings yet
- Champion LRS Series L23RS-L29RS BrochureDocument2 pagesChampion LRS Series L23RS-L29RS BrochuretrutleptNo ratings yet