Download as pdf or txt
You might also like
- 2 - Kingery - Introduction To Ceramics PDFDocument522 pages2 - Kingery - Introduction To Ceramics PDFAndrea Prado88% (24)
- AbsorptionDocument39 pagesAbsorptionAlexânder De Paula Rodrigues100% (2)
- AeromodellingDocument15 pagesAeromodellingzain ansariNo ratings yet
- Astm A-615Document8 pagesAstm A-615bill_lee_24271% (7)
- 1456310915E Textchap 3mod 1Document6 pages1456310915E Textchap 3mod 1Soumyajoy DasNo ratings yet
- Note8 PDFDocument11 pagesNote8 PDFJiasheng NiNo ratings yet
- 12 VectorSpace GeneratorsHandoutDocument17 pages12 VectorSpace GeneratorsHandoutaberatesfaye091No ratings yet
- c1s1 - Vectors in Euclidean Spaces PDFDocument8 pagesc1s1 - Vectors in Euclidean Spaces PDFmaytemp2012No ratings yet
- Orthogonal ComplementDocument6 pagesOrthogonal ComplementmalynNo ratings yet
- Euclid Lnms 1196285107Document69 pagesEuclid Lnms 1196285107noer_rizalNo ratings yet
- General Vector SpacesDocument15 pagesGeneral Vector SpacesInnaNo ratings yet
- To Differential Geometry: Robert BartnikDocument40 pagesTo Differential Geometry: Robert BartnikDhruv BhardwajNo ratings yet
- Lec10 LeastSquaresRegression PDFDocument4 pagesLec10 LeastSquaresRegression PDFSalvo NiceNo ratings yet
- Generalized Hamiltonian DynamicsDocument13 pagesGeneralized Hamiltonian Dynamics陳琮方No ratings yet
- MATH231: Linear Algebra, Lecture 1: Tran Duc Anh, Mail: Ducanh@hnue - Edu.vn September 2021Document4 pagesMATH231: Linear Algebra, Lecture 1: Tran Duc Anh, Mail: Ducanh@hnue - Edu.vn September 2021Đỗ DươngNo ratings yet
- MA412 FinalDocument82 pagesMA412 FinalAhmad Zen FiraNo ratings yet
- LACM March13Document15 pagesLACM March13Cleevh MabialaNo ratings yet
- Mathematical Treatise On Linear AlgebraDocument7 pagesMathematical Treatise On Linear AlgebraJonathan MahNo ratings yet
- LACM R3linearspaceDocument15 pagesLACM R3linearspaceCleevh MabialaNo ratings yet
- Some Mathematical Tools: 1.1 Some Definitions in AlgebraDocument12 pagesSome Mathematical Tools: 1.1 Some Definitions in AlgebraAnonymous C1Sjod6No ratings yet
- Introductory Functional Analysis With ApplicationsDocument14 pagesIntroductory Functional Analysis With ApplicationsAmir NazirNo ratings yet
- 1 Vector Spaces and Matrices: 1.1 BasicsDocument4 pages1 Vector Spaces and Matrices: 1.1 Basicsarcias12No ratings yet
- Appendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesDocument12 pagesAppendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesnefizeNo ratings yet
- Lecture Notes 2: Matrices: 1 Basic PropertiesDocument38 pagesLecture Notes 2: Matrices: 1 Basic PropertiesEarly CareersNo ratings yet
- 11 Linearmodels 3Document13 pages11 Linearmodels 3SCRBDusernmNo ratings yet
- Chapter 1 Vector SpacesDocument15 pagesChapter 1 Vector Spacesaye pyoneNo ratings yet
- Advanced Numerical Analysis: Data Interpolation and SmoothingDocument26 pagesAdvanced Numerical Analysis: Data Interpolation and SmoothingBishnu LamichhaneNo ratings yet
- Block 1Document18 pagesBlock 1muay88No ratings yet
- 14 Math2121 Fall2017Document4 pages14 Math2121 Fall2017Suman ChatterjeeNo ratings yet
- Lec 4Document21 pagesLec 4Frédéric BlaisNo ratings yet
- Math 308 List of Definitions: W.R. Casper December 7, 2013Document5 pagesMath 308 List of Definitions: W.R. Casper December 7, 2013JoeyNo ratings yet
- NOTES-Intro To Hilbert SpacesDocument28 pagesNOTES-Intro To Hilbert SpacesdebmallyNo ratings yet
- Math 5390 Chapter 2Document5 pagesMath 5390 Chapter 2Mauricio AntonioNo ratings yet
- Notes On Linear AlgebraDocument10 pagesNotes On Linear AlgebraManas SNo ratings yet
- 2 StatesDocument10 pages2 StatesVinayak DuttaNo ratings yet
- VectorsDocument27 pagesVectorsVasia PapageorgiouNo ratings yet
- 斯坦福大学机器学习数学基础 9-16Document8 pages斯坦福大学机器学习数学基础 9-162285145156No ratings yet
- MA265 Review Chapter 4Document9 pagesMA265 Review Chapter 4IdkNo ratings yet
- Conditional ExpectationDocument33 pagesConditional ExpectationOsama HassanNo ratings yet
- Vector Space PresentationDocument26 pagesVector Space Presentationmohibrajput230% (1)
- VectoDocument15 pagesVectoemmaayindooNo ratings yet
- Linear Algebra Cheat SheetDocument5 pagesLinear Algebra Cheat Sheetguanhuaqu58No ratings yet
- Hudyma AlexDocument33 pagesHudyma AlexYogakeerthigaNo ratings yet
- Linear Algebra TutorialDocument9 pagesLinear Algebra TutorialKrishna Kishore VangalaNo ratings yet
- Vector Spaces: EE 650 - Basics of Modern Control SystemsDocument7 pagesVector Spaces: EE 650 - Basics of Modern Control SystemsagrimbNo ratings yet
- A Property of Linear FuzzyDocument5 pagesA Property of Linear FuzzyRituparna ChutiaNo ratings yet
- Some Mathematical Preliminaries Linear Vector SpacesDocument9 pagesSome Mathematical Preliminaries Linear Vector SpacesjasmonNo ratings yet
- Fourier 12Document13 pagesFourier 12Dushyant SinghNo ratings yet
- Fernandez BathDocument57 pagesFernandez Bathzooropa1844945No ratings yet
- The Summary Should Include at Least The FollowingDocument3 pagesThe Summary Should Include at Least The FollowingJoy AJNo ratings yet
- CompleteMetricSpaces PDFDocument4 pagesCompleteMetricSpaces PDFDaniel Sastoque BuitragoNo ratings yet
- Love Fest in AlgebraDocument17 pagesLove Fest in AlgebraZhao RuidiNo ratings yet
- LACM March18Document13 pagesLACM March18Cleevh MabialaNo ratings yet
- Quantum PhysicsDocument50 pagesQuantum PhysicsSahil ChadhaNo ratings yet
- Ma2aPracLectures 10-12Document16 pagesMa2aPracLectures 10-12Muhammed YagciogluNo ratings yet
- Vector SpaceDocument5 pagesVector SpaceDBANJAN MAITYNo ratings yet
- Readings On Functions PDFDocument22 pagesReadings On Functions PDFKATHLEEN GONo ratings yet
- Chapter 3 Vector Spaces: 3.1 DefinitionDocument16 pagesChapter 3 Vector Spaces: 3.1 DefinitionJonathan JufenoNo ratings yet
- Calculus IIIvectorcalculus 2011Document82 pagesCalculus IIIvectorcalculus 2011Alfi LouisNo ratings yet
- Brendans RT Notes OJODocument4 pagesBrendans RT Notes OJORonald BarriosNo ratings yet
- Jensen Script August 03 2016Document145 pagesJensen Script August 03 2016BRAHYAN ALBERTO ROJAS ALBARRACINNo ratings yet
- 3 - Vector SpacesDocument143 pages3 - Vector SpacesnhưNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Recent Developments in Urea BiosensorsDocument12 pagesRecent Developments in Urea BiosensorsSyed AkramNo ratings yet
- Vector PDFDocument4 pagesVector PDFSyed AkramNo ratings yet
- Vector Spaces PDFDocument6 pagesVector Spaces PDFSyed AkramNo ratings yet
- Unit 5: Counter and Register: Lesson 1: Introduction To CounterDocument14 pagesUnit 5: Counter and Register: Lesson 1: Introduction To CounterSyed AkramNo ratings yet
- Vector Spaces PDFDocument22 pagesVector Spaces PDFSyed AkramNo ratings yet
- I. Multiple Choice QuestionsDocument7 pagesI. Multiple Choice QuestionsSyed AkramNo ratings yet
- Vector PDFDocument4 pagesVector PDFSyed AkramNo ratings yet
- Stacks Data Structure - Problem Statement (And Xor Or)Document8 pagesStacks Data Structure - Problem Statement (And Xor Or)Syed AkramNo ratings yet
- Vibration IsolationDocument7 pagesVibration IsolationSyed AkramNo ratings yet
- C MCQ Catest1Document11 pagesC MCQ Catest1Syed AkramNo ratings yet
- Image Formation in Lenses.Document5 pagesImage Formation in Lenses.Syed AkramNo ratings yet
- 168 ProjectDocument2 pages168 Projectfrederique.retailNo ratings yet
- Cost CurvesDocument2 pagesCost CurvesSumit Ray100% (1)
- Envision Math 3th GR Topic 5Document28 pagesEnvision Math 3th GR Topic 5Anna K. RiveraNo ratings yet
- Ebook Ebook PDF Principles of Human Physiology 6th Edition PDFDocument41 pagesEbook Ebook PDF Principles of Human Physiology 6th Edition PDFdonita.nichols650100% (43)
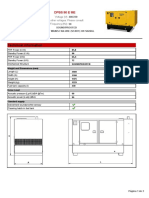
- Technical Information: Dpbs 90 E MeDocument3 pagesTechnical Information: Dpbs 90 E MeЛулу ТраедNo ratings yet
- Top-Down Triage Method For SimulationDocument3 pagesTop-Down Triage Method For SimulationrajuhaveriNo ratings yet
- Lectura Ingles Grado 5ºDocument3 pagesLectura Ingles Grado 5ºEdinson Prado MurilloNo ratings yet
- TXP® BTC: GeometryDocument2 pagesTXP® BTC: GeometryLeonardo BarriosNo ratings yet
- Bodie Investments 12e IM CH27Document3 pagesBodie Investments 12e IM CH27lexon_kbNo ratings yet
- Chemistry Project PDFDocument30 pagesChemistry Project PDFyash hiraniNo ratings yet
- New Material Seals Better On HVOF CoatingsDocument2 pagesNew Material Seals Better On HVOF Coatingssandbad2100% (2)
- Page Proofs: Continuous Probability DistributionsDocument44 pagesPage Proofs: Continuous Probability DistributionsApoorva PanchalNo ratings yet
- Concha y Toro Company AnalysisDocument23 pagesConcha y Toro Company AnalysisflyawaywiththeseaNo ratings yet
- 26 Spruit DragonairDocument2 pages26 Spruit DragonairW.J. ZondagNo ratings yet
- Remedies For VenusDocument2 pagesRemedies For VenusAnonymous 4Iu6iiNo ratings yet
- Flow Simulation Report Square Nozzle 3-1 InchDocument18 pagesFlow Simulation Report Square Nozzle 3-1 InchVianAlwiNo ratings yet
- S.No Description Qty Unit Assumed by HWPL: Scope of Work - Supply PSSDocument14 pagesS.No Description Qty Unit Assumed by HWPL: Scope of Work - Supply PSSASR REDDYNo ratings yet
- MMSE Journal Vol.7 2016Document114 pagesMMSE Journal Vol.7 2016Leonardo MonteiroNo ratings yet
- Christology in The Political Theology of Oliver O'Donovan PDFDocument16 pagesChristology in The Political Theology of Oliver O'Donovan PDFsemiteologicoNo ratings yet
- Rectus Femoris in Gait CycleDocument5 pagesRectus Femoris in Gait CycleanjelikaNo ratings yet
- Blessed Thistle and Blue VervainDocument4 pagesBlessed Thistle and Blue VervainSoror OnyxNo ratings yet
- Falcon Combination Oven S Series User ManualDocument50 pagesFalcon Combination Oven S Series User Manualخالد التريكيNo ratings yet
- Led Music Controller InsructionsDocument2 pagesLed Music Controller InsructionsArnaldoloNo ratings yet
- Turbine Cat SolarDocument2 pagesTurbine Cat SolarAbid Lakhani100% (1)
- AccurioLabel 400 - Basic - Demo - Script - v1.0 - EDocument33 pagesAccurioLabel 400 - Basic - Demo - Script - v1.0 - EDiego LanderosNo ratings yet
- Daddy On Duty Crescent Cove Book 12 by TarynDocument259 pagesDaddy On Duty Crescent Cove Book 12 by TarynMonalisa Ngqulana100% (3)