Download as pdf or txt
You might also like
- Ge Optima CT 660Document547 pagesGe Optima CT 660buattra nsferfileNo ratings yet
- Rakuten Font: User ManualDocument35 pagesRakuten Font: User Manualfaizahamed111No ratings yet
- Making A Poster Rubric 1Document1 pageMaking A Poster Rubric 1Rey Mart DelenNo ratings yet
- Introduction To Autodesk RevitDocument30 pagesIntroduction To Autodesk RevitRico DumlaoNo ratings yet
- Ertlab User Full Guide v.1.0 Beta VersionDocument223 pagesErtlab User Full Guide v.1.0 Beta VersionAdil CureshiNo ratings yet
- HTML and CSS Color NamesDocument2 pagesHTML and CSS Color NamesCezanne CruzNo ratings yet
- 3d Drawing and Optical IllusionsDocument70 pages3d Drawing and Optical IllusionsValter Carvalho100% (5)
- Pointseg: Real-Time Semantic Segmentation Based On 3D Lidar Point CloudDocument7 pagesPointseg: Real-Time Semantic Segmentation Based On 3D Lidar Point CloudOscar MarteNo ratings yet
- Squeezesegv2: Improved Model Structure and Unsupervised Domain Adaptation For Road-Object Segmentation From A Lidar Point CloudDocument7 pagesSqueezesegv2: Improved Model Structure and Unsupervised Domain Adaptation For Road-Object Segmentation From A Lidar Point CloudArmandoNo ratings yet
- Dynamic SLAMDocument16 pagesDynamic SLAMshreyashNo ratings yet
- DSP-SLAM: Object Oriented SLAM With Deep Shape PriorsDocument16 pagesDSP-SLAM: Object Oriented SLAM With Deep Shape PriorsmateNo ratings yet
- 21.deep Learning For ARDocument3 pages21.deep Learning For ARgptplus08No ratings yet
- Yang SANet Scene Agnostic Network For Camera Localization ICCV 2019 PaperDocument10 pagesYang SANet Scene Agnostic Network For Camera Localization ICCV 2019 Papervishalk172No ratings yet
- Point Net GPDDocument7 pagesPoint Net GPDypxypxypx700No ratings yet
- Zhu NICE-SLAM Neural Implicit Scalable Encoding For SLAM CVPR 2022 PaperDocument11 pagesZhu NICE-SLAM Neural Implicit Scalable Encoding For SLAM CVPR 2022 PaperjingnanyakNo ratings yet
- 2019-Deep Optics For Monocular Depth Estimation and 3D Object DetectionDocument10 pages2019-Deep Optics For Monocular Depth Estimation and 3D Object Detectioncynorr rainNo ratings yet
- On Computer Vision For Augmented RealityDocument4 pagesOn Computer Vision For Augmented RealityAditya IyerNo ratings yet
- Research Paper Zebra PoseDocument16 pagesResearch Paper Zebra PoseDivyam ShethNo ratings yet
- Robust CVDDocument11 pagesRobust CVDqwertyNo ratings yet
- 1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperDocument9 pages1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperxuhangmkNo ratings yet
- A Tutorial On Motion Capture Driven Character AnimDocument7 pagesA Tutorial On Motion Capture Driven Character AnimapisvdnNo ratings yet
- Coslam: Collaborative Visual Slam in Dynamic Environments: Danping Zou and Ping Tan, Member, IeeeDocument13 pagesCoslam: Collaborative Visual Slam in Dynamic Environments: Danping Zou and Ping Tan, Member, IeeeVanshil ShahNo ratings yet
- Droid SlamDocument12 pagesDroid SlamGeorge PachitariuNo ratings yet
- Georefine: Self-Supervised Online Depth Refinement For Accurate Dense MappingDocument24 pagesGeorefine: Self-Supervised Online Depth Refinement For Accurate Dense MappingPengZai ZhongNo ratings yet
- False Positive Removal For 3D Vehicle Detection With Penetrated Point ClassifierDocument5 pagesFalse Positive Removal For 3D Vehicle Detection With Penetrated Point ClassifierAsil AsilaNo ratings yet
- Maqueda Event-Based Vision Meets CVPR 2018 PaperDocument9 pagesMaqueda Event-Based Vision Meets CVPR 2018 Paperحسام جعفر كاظمNo ratings yet
- 1.8 Maria Klodt Supervising The New ECCV 2018 PaperDocument16 pages1.8 Maria Klodt Supervising The New ECCV 2018 PaperSuraj PatniNo ratings yet
- 21 (2019) Zhang Zhou - Robust Multi-Modality Multi-Object TrackingDocument10 pages21 (2019) Zhang Zhou - Robust Multi-Modality Multi-Object Trackingmat felNo ratings yet
- Camera Pose Estimation Using CNN: Bhattarabhorn Wattanacheep Orachat ChitsobhukDocument5 pagesCamera Pose Estimation Using CNN: Bhattarabhorn Wattanacheep Orachat ChitsobhukLeonardo Di Ser PieroNo ratings yet
- Monocular Depth Estimation Based On Deep Learning An OverviewDocument16 pagesMonocular Depth Estimation Based On Deep Learning An OverviewJ SpencerNo ratings yet
- Peng PVNet Pixel-Wise Voting Network For 6DoF Pose Estimation CVPR 2019 PaperDocument10 pagesPeng PVNet Pixel-Wise Voting Network For 6DoF Pose Estimation CVPR 2019 Paperyg10n21No ratings yet
- Ummenhofer DeMoN Depth and CVPR 2017 PaperDocument10 pagesUmmenhofer DeMoN Depth and CVPR 2017 PaperGG GENo ratings yet
- Selvaraju Grad-CAM Visual Explanations ICCV 2017 PaperDocument9 pagesSelvaraju Grad-CAM Visual Explanations ICCV 2017 Papermehrdad moradiNo ratings yet
- Real Time TrackingDocument8 pagesReal Time Trackingmaacpie8353No ratings yet
- Sagar Institute of Research & Technology Department of Electronics & CommunicationDocument13 pagesSagar Institute of Research & Technology Department of Electronics & CommunicationShanu PrakashNo ratings yet
- Li DeepFusion Lidar-Camera Deep Fusion For Multi-Modal 3D Object Detection CVPR 2022 PaperDocument10 pagesLi DeepFusion Lidar-Camera Deep Fusion For Multi-Modal 3D Object Detection CVPR 2022 PaperhaisabiNo ratings yet
- DS-SLAM A Semantic Visual SLAM Towards Dynamic EnvironmentsDocument7 pagesDS-SLAM A Semantic Visual SLAM Towards Dynamic EnvironmentsDimas de la PeñaNo ratings yet
- Motion Fused Frames: Data Level Fusion Strategy For Hand Gesture RecognitionDocument9 pagesMotion Fused Frames: Data Level Fusion Strategy For Hand Gesture RecognitionFsha MerhawitNo ratings yet
- DROID-SLAM Research PaperDocument15 pagesDROID-SLAM Research PaperItem SongsNo ratings yet
- Research PaperDocument21 pagesResearch Paperdivyashree jadejaNo ratings yet
- Fine-Tuning CNN Image Retrieval With No Human AnnotationDocument14 pagesFine-Tuning CNN Image Retrieval With No Human AnnotationJaswanthh KrishnaNo ratings yet
- Tiny Object RecognitionDocument8 pagesTiny Object RecognitionLeandrob131No ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Simmim: A Simple Framework For Masked Image ModelingDocument11 pagesSimmim: A Simple Framework For Masked Image ModelingqwertyNo ratings yet
- SAR Target Recognition Based On Deep LearningDocument7 pagesSAR Target Recognition Based On Deep LearningLiiz RozazNo ratings yet
- Neural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyDocument11 pagesNeural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyChidera UnigweNo ratings yet
- Mobilenet Part1 RefDocument2 pagesMobilenet Part1 RefsrinidhiNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- Face Detection System Based On MLP Neural NetworkDocument6 pagesFace Detection System Based On MLP Neural NetworkJournal of ComputingNo ratings yet
- Recognizing Traffic Signs With Synthetic Data and Deep LearningDocument9 pagesRecognizing Traffic Signs With Synthetic Data and Deep LearningbijcicnjounalNo ratings yet
- Ilchae Jung Real-Time MDNet ECCV 2018 PaperDocument16 pagesIlchae Jung Real-Time MDNet ECCV 2018 PaperSamyak DhutaleNo ratings yet
- Capnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionDocument8 pagesCapnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionArmandoNo ratings yet
- An Alternative Lightness Control With GAN For Augmenting Camera DataDocument6 pagesAn Alternative Lightness Control With GAN For Augmenting Camera DataThien ThaiNo ratings yet
- Hu Joint Monocular 3D Vehicle Detection and Tracking ICCV 2019 PaperDocument10 pagesHu Joint Monocular 3D Vehicle Detection and Tracking ICCV 2019 PaperTushirNo ratings yet
- CNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionDocument10 pagesCNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionbocailloNo ratings yet
- A Monocular Visual SLAM System Augmented by LightwDocument19 pagesA Monocular Visual SLAM System Augmented by LightwBENNANI MUSTAPHA1No ratings yet
- MC 4Document24 pagesMC 4sai saiNo ratings yet
- Key TRDocument10 pagesKey TRqwertyNo ratings yet
- 03 - Semantic Visual SLAM in Dynamic EnvironmentDocument12 pages03 - Semantic Visual SLAM in Dynamic Environmentshubham shankarNo ratings yet
- Vdo SlamDocument15 pagesVdo SlamHarre Bams Ayma ArandaNo ratings yet
- Learning Adversarial 3D Model Generation With 2D Image EnhancerDocument8 pagesLearning Adversarial 3D Model Generation With 2D Image EnhancerLadyBruneNo ratings yet
- RR 2Document10 pagesRR 2Gayathri GirishNo ratings yet
- Ijivp V3 I1 Paper 6 479 484Document6 pagesIjivp V3 I1 Paper 6 479 484V ArunachalamNo ratings yet
- Grad-CAM: Visual Explanations From Deep Networks Via Gradient-Based LocalizationDocument24 pagesGrad-CAM: Visual Explanations From Deep Networks Via Gradient-Based LocalizationgousesyedNo ratings yet
- Pyramid Image Processing: Exploring the Depths of Visual AnalysisFrom EverandPyramid Image Processing: Exploring the Depths of Visual AnalysisNo ratings yet
- My New Year's Resolution by SlidesgoDocument56 pagesMy New Year's Resolution by SlidesgoPramita Sarah EvalineNo ratings yet
- Brand Guideline Final PDFDocument52 pagesBrand Guideline Final PDFShreya Agarwal0% (1)
- Svcet: Srividya College of Engineering and Technology Lecture NotesDocument41 pagesSvcet: Srividya College of Engineering and Technology Lecture NotesLalitha AVNo ratings yet
- Representing 3D in 2DDocument5 pagesRepresenting 3D in 2Dtanishadev03No ratings yet
- Autodesk Plant 3D PDFDocument592 pagesAutodesk Plant 3D PDFAngelo Aracena Garcia83% (6)
- HP 1 Foxconn PM-AMD (PM A HPC S PROTO A X1 090826D2)Document68 pagesHP 1 Foxconn PM-AMD (PM A HPC S PROTO A X1 090826D2)Cedomir GajicNo ratings yet
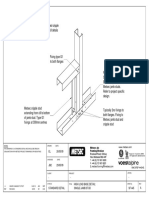
- Metsec Framing Detail sf445 PDFDocument1 pageMetsec Framing Detail sf445 PDFBanditAkosNo ratings yet
- AMD Ryzen 9 3900 Vs Intel Core I7-10700k - GadgetVersusDocument6 pagesAMD Ryzen 9 3900 Vs Intel Core I7-10700k - GadgetVersuswillalizadeNo ratings yet
- Manual de OperacionDocument272 pagesManual de OperacionAndres GrisalesNo ratings yet
- 20ME12P Unit 04 Orthographic To Isometric ProjectionsDocument10 pages20ME12P Unit 04 Orthographic To Isometric ProjectionsThanmay JSNo ratings yet
- Abstract CV: Maharani Retna Duhita, M.SC.,PHD - Med.ScDocument39 pagesAbstract CV: Maharani Retna Duhita, M.SC.,PHD - Med.ScnanaNo ratings yet
- 58 Kanantong - Kayupo - Mangrove PDFDocument1 page58 Kanantong - Kayupo - Mangrove PDFCirilo Jr. LagnasonNo ratings yet
- Ottawa Tulip Festival by SlidesgoDocument53 pagesOttawa Tulip Festival by Slidesgoivan kurniawanNo ratings yet
- IT Code 402 Notes: CBSE Class 10Document4 pagesIT Code 402 Notes: CBSE Class 10SUMITNo ratings yet
- NDBIDocument13 pagesNDBIgeologistlakhanNo ratings yet
- 3D Printer Laser ModificationDocument30 pages3D Printer Laser ModificationikhsanNo ratings yet
- Manuscript Preparation Checklist: GeneralDocument3 pagesManuscript Preparation Checklist: GeneralALAKOUKONo ratings yet
- ARTS10 q2 Mod3 Digitalcomputerartapplications-Version3.2Document35 pagesARTS10 q2 Mod3 Digitalcomputerartapplications-Version3.2junnel masaluonNo ratings yet
- Cuadernillo Quinto Grado InglesDocument26 pagesCuadernillo Quinto Grado InglesAndrés Felipe Cañas CastañedaNo ratings yet
- Skin Texturing and Shading in Maya: Procedural MapsDocument6 pagesSkin Texturing and Shading in Maya: Procedural MapsWilliam H SinerisNo ratings yet
- Service Manual: Viewsonic Pj501/Pj551Document62 pagesService Manual: Viewsonic Pj501/Pj551Andrey KhodanitskiNo ratings yet
- Study of Computer Aided Design and Mechanical Design by Computer SoftwareDocument6 pagesStudy of Computer Aided Design and Mechanical Design by Computer SoftwareAmba Lrcfools InfosNo ratings yet
- 3D WireframesDocument6 pages3D WireframesaymeneNo ratings yet