Download as pdf or txt
You might also like
- Errores Robot ReisDocument331 pagesErrores Robot ReisEsteban Capodici100% (1)
- Gas Monitoring PPT FinalDocument31 pagesGas Monitoring PPT FinalAditya Kolhe67% (6)
- Project CharterDocument14 pagesProject Charterbhatta_ashu3672100% (2)
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentFrom EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentRating: 4.5 out of 5 stars4.5/5 (3)
- The ROI From Software QualityDocument298 pagesThe ROI From Software QualityTrendkill Trendkill TrendkillNo ratings yet
- The Why and How of Adopting Zero Trust Model in OrganizationsDocument6 pagesThe Why and How of Adopting Zero Trust Model in OrganizationsBaloch Lens PhotographerNo ratings yet
- Check Before Entering Confined Spaces: AbstractDocument5 pagesCheck Before Entering Confined Spaces: Abstractaimu thrilokNo ratings yet
- Selecting Transmitters For Safety Instrumented SystemsDocument8 pagesSelecting Transmitters For Safety Instrumented Systemskir1234No ratings yet
- Hydrogen Gas Detection in Battery Rooms 1660558735Document4 pagesHydrogen Gas Detection in Battery Rooms 1660558735richardNo ratings yet
- Basics of InstrumentDocument66 pagesBasics of InstrumentnizamuddinNo ratings yet
- FNL 1Document7 pagesFNL 1Sabbir Ahmed 1721669No ratings yet
- InstrumentationDocument25 pagesInstrumentationAshutosh Dixit E3No ratings yet
- LPG Leakage & DetectionDocument3 pagesLPG Leakage & DetectionSravan GopuNo ratings yet
- 2000 CIGRE Paper 12-204Document8 pages2000 CIGRE Paper 12-204Anonymous 9VcxlFErfNo ratings yet
- 4.30 PM / Calibration Procedure For Fire & Gas Detection System Installed at Different Plant Location Across The ComplexDocument5 pages4.30 PM / Calibration Procedure For Fire & Gas Detection System Installed at Different Plant Location Across The Complexkirandevi1981No ratings yet
- L&T High Integrity Pressure Protection System HIPPSDocument8 pagesL&T High Integrity Pressure Protection System HIPPSAli AbbasovNo ratings yet
- Ultrasonic Flow Meter Compliance With Api 14.10 Measurement of Flow To FlaresDocument10 pagesUltrasonic Flow Meter Compliance With Api 14.10 Measurement of Flow To FlaresVictor Enrique Rosales ParadaNo ratings yet
- Digital Flow Meter For GasDocument1 pageDigital Flow Meter For GasMASSFLOWMEASUREMENTSNo ratings yet
- Design and Implementation of Liquid Level Detector Using Ultrasonic SensorDocument6 pagesDesign and Implementation of Liquid Level Detector Using Ultrasonic SensorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Gas Leakage Detection With Monitoring and Automatic Safety SystemDocument4 pagesSmart Gas Leakage Detection With Monitoring and Automatic Safety SystemYeasin Arafat FahadNo ratings yet
- Digital Flow Meter For GasDocument1 pageDigital Flow Meter For GasMASSFLOWMEASUREMENTSNo ratings yet
- Coal Miners Monitoring SystemDocument9 pagesCoal Miners Monitoring SystemIJRASETPublicationsNo ratings yet
- Is All Safety-Critical Equipment Critical To SafetyDocument6 pagesIs All Safety-Critical Equipment Critical To SafetyLi QiNo ratings yet
- HIPPSDocument8 pagesHIPPSAmit PandhareNo ratings yet
- Smart DevicesDocument16 pagesSmart DevicesmanojchandrasekharanNo ratings yet
- Prominent Equipment Catalogue 2011Document751 pagesProminent Equipment Catalogue 2011saber66No ratings yet
- Overfill Prevention: Automation Solutions For Oil & Gas, Defense and Aviation ApplicationsDocument4 pagesOverfill Prevention: Automation Solutions For Oil & Gas, Defense and Aviation ApplicationsAntonio FullerNo ratings yet
- 05 - Yield, Measurement Accuracy and Test TimeDocument49 pages05 - Yield, Measurement Accuracy and Test Timedeepak100% (1)
- Sense Point Technical HandbookDocument45 pagesSense Point Technical HandbookMaricruz RodríguezNo ratings yet
- Disadavantage of Radioactive Level Indicators For Co2 BottlrDocument2 pagesDisadavantage of Radioactive Level Indicators For Co2 BottlrTapas ChaudhuriNo ratings yet
- Easidew Manual (BHEL)Document57 pagesEasidew Manual (BHEL)NILESH100% (1)
- LPG Gas Monitoring and Cylinder Booking Alert System: Divyansh Srivastava, Varshini ADocument6 pagesLPG Gas Monitoring and Cylinder Booking Alert System: Divyansh Srivastava, Varshini Ashital shermaleNo ratings yet
- Application Note: Vibration Monitoring of Air-Cooled Heat Exchangers - Safety and Predictive MonitoringDocument2 pagesApplication Note: Vibration Monitoring of Air-Cooled Heat Exchangers - Safety and Predictive MonitoringMauricioalvNo ratings yet
- Webtec Hydraulic Tester ManualDocument68 pagesWebtec Hydraulic Tester ManualisidoroNo ratings yet
- How To Cure 7 Common Tank Gauging HeadachesDocument12 pagesHow To Cure 7 Common Tank Gauging Headachesabs0001No ratings yet
- Valve OnLine TestDocument7 pagesValve OnLine TestnisiagorethNo ratings yet
- 3144P Assessment Report-Rev2and3Document19 pages3144P Assessment Report-Rev2and3rplNo ratings yet
- Taimoor Inayat Assi 3Document10 pagesTaimoor Inayat Assi 3Charsi 1080No ratings yet
- Project Report: Study of Piping and Instrumentation Diagram (P&ID), Distributed Control SystemsDocument32 pagesProject Report: Study of Piping and Instrumentation Diagram (P&ID), Distributed Control SystemsrockynsitNo ratings yet
- Gas Insulated Substation Control and Monitoring R1Document33 pagesGas Insulated Substation Control and Monitoring R1Fady MegalaNo ratings yet
- Minimising Gas Exposure WhitepaperDocument11 pagesMinimising Gas Exposure WhitepaperJullian Gomez GregorioNo ratings yet
- Sub-Sea Hipps Sil Verification Report SampleDocument22 pagesSub-Sea Hipps Sil Verification Report Samplejose vasquezNo ratings yet
- Important Product Safety Notification: AttentionDocument8 pagesImportant Product Safety Notification: Attentionrai-seoNo ratings yet
- Hekping You Select TransmitterDocument10 pagesHekping You Select Transmitteraugur886No ratings yet
- Meter ProverDocument5 pagesMeter Proverjivajive100% (2)
- 085 9800 Manual Rev BDocument18 pages085 9800 Manual Rev BRolandoIgorLeivaNo ratings yet
- How To Improve Industrial Productivity With Loop CalibrationDocument6 pagesHow To Improve Industrial Productivity With Loop Calibrationابوالحروف العربي ابوالحروفNo ratings yet
- Tentative Synopsis: Submitted byDocument5 pagesTentative Synopsis: Submitted byPuneethHjNo ratings yet
- Certified Automationprofessional (Isa Notes)Document8 pagesCertified Automationprofessional (Isa Notes)Mohammed AzeemNo ratings yet
- GE Relief Valve Leak DetectionDocument3 pagesGE Relief Valve Leak DetectionsaverrNo ratings yet
- Gas Insulated Substation Control and MonitoringDocument33 pagesGas Insulated Substation Control and MonitoringMaharajaNo ratings yet
- Pankaj Yadav - Mini ProjectDocument13 pagesPankaj Yadav - Mini Projectry7560No ratings yet
- Tank Control Systems Land Application Brochure2011Document12 pagesTank Control Systems Land Application Brochure2011_commandos_No ratings yet
- Transactions On: Power Delivery Vol. 2, April 1991Document9 pagesTransactions On: Power Delivery Vol. 2, April 1991Naga RajuNo ratings yet
- Moisture System For Mission-Critical Process Control ApplicationsDocument4 pagesMoisture System For Mission-Critical Process Control ApplicationsAnonymous zMWvcTNo ratings yet
- Sanitary Sensor ArticleDocument2 pagesSanitary Sensor Articlehs1986No ratings yet
- CalibrationDocument28 pagesCalibrationureeamcNo ratings yet
- Share ReportonGasLeakageDetectionSensorDocument12 pagesShare ReportonGasLeakageDetectionSensorMystyNo ratings yet
- K-Gauge Hla 600: Independent High Level and Overfill Alarm SystemDocument4 pagesK-Gauge Hla 600: Independent High Level and Overfill Alarm SystemPavel ViktorNo ratings yet
- Substation Case StudyDocument10 pagesSubstation Case StudyMaribel C. MagbanuaNo ratings yet
- Contol Ebook PDFDocument71 pagesContol Ebook PDFbab_ooNo ratings yet
- Validation and Verification of Automated Systems: Results of the ENABLE-S3 ProjectFrom EverandValidation and Verification of Automated Systems: Results of the ENABLE-S3 ProjectNo ratings yet
- B - WP - A Practical Approach For The Selection of PES Used For SF in The Process IndustryDocument13 pagesB - WP - A Practical Approach For The Selection of PES Used For SF in The Process Industrymankrsha83No ratings yet
- B - GL - Maintenance Overrride ProcedureDocument4 pagesB - GL - Maintenance Overrride Proceduremankrsha83No ratings yet
- B - Certification Report SampleDocument17 pagesB - Certification Report Samplemankrsha83No ratings yet
- List of ISA Standards CommitteesDocument1 pageList of ISA Standards CommitteeswawanNo ratings yet
- HE Checklist XeroxDocument9 pagesHE Checklist XeroxSiskaNo ratings yet
- Physics Holiday HomeworkDocument12 pagesPhysics Holiday HomeworkNischay VermaNo ratings yet
- O & M Manual - FA System - Speed FireDocument117 pagesO & M Manual - FA System - Speed FireArfaz HussainNo ratings yet
- Data PresentationDocument15 pagesData PresentationAesthethic ArcNo ratings yet
- EI2403 - VLSI Design 2 Marks With AnswersDocument23 pagesEI2403 - VLSI Design 2 Marks With AnswersAnand GvphNo ratings yet
- Vacon NXP Advanced Safety Options Quick Guide DPD01919A UKDocument18 pagesVacon NXP Advanced Safety Options Quick Guide DPD01919A UKeduardoluque69No ratings yet
- HadoopDocument8 pagesHadoopAkanksha Mishra100% (1)
- Pengantar SAP & Purchasing PDFDocument25 pagesPengantar SAP & Purchasing PDFخير الحفظNo ratings yet
- Cad Lab Viva QuestionDocument9 pagesCad Lab Viva QuestionSms RajaNo ratings yet
- TranscriptDocument2 pagesTranscriptadil_qwerty67% (3)
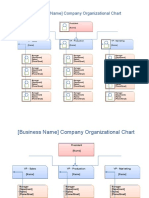
- Company Organization ChartDocument4 pagesCompany Organization ChartDheyatNo ratings yet
- Tibco BW Performance Best PracticesDocument48 pagesTibco BW Performance Best Practicesfeliciomarinho100% (1)
- ESpace 7950 IP Phone V200R003 User GuideDocument120 pagesESpace 7950 IP Phone V200R003 User GuideNoel ConstantinoNo ratings yet
- Porn StatisticsDocument14 pagesPorn StatisticsJon Edzel Dwin TanNo ratings yet
- Thesis Abstract Sample For Information TechnologyDocument6 pagesThesis Abstract Sample For Information Technologywendyrobertsonphoenix100% (2)
- Pirates of Silicon Valley - Movie NotesDocument3 pagesPirates of Silicon Valley - Movie NotesLarissa IoannoniNo ratings yet
- CM2000 PDFDocument24 pagesCM2000 PDFJuan Felipe Vanegas VargasNo ratings yet
- Mib JNX ChassisDocument37 pagesMib JNX ChassisscorcdNo ratings yet
- SCM ImpDocument88 pagesSCM ImpKiran GandlaNo ratings yet
- Quick Start Guide: QC Analog HD Camera & DVR BundleDocument36 pagesQuick Start Guide: QC Analog HD Camera & DVR BundleSzilard ZsigmondNo ratings yet
- Abb-Ref 615Document92 pagesAbb-Ref 615Erique Soares100% (1)
- Landmark Technology v. Bridgestone AmericasDocument18 pagesLandmark Technology v. Bridgestone AmericasPriorSmartNo ratings yet
- Dell 24 Inch Video Conferencing Monitor (C2423H) - Computer Monitors - Dell USADocument19 pagesDell 24 Inch Video Conferencing Monitor (C2423H) - Computer Monitors - Dell USASainiRahulNo ratings yet
- 05 Basic Computer Part2Document141 pages05 Basic Computer Part2Kendall BirjueNo ratings yet
- Related Rights, and Collective Management: English January 2005Document10 pagesRelated Rights, and Collective Management: English January 2005NileNo ratings yet