Download as pdf or txt
You might also like
- EVERGREEN CASE - Transport & Insurance in Foreign TradeDocument16 pagesEVERGREEN CASE - Transport & Insurance in Foreign TradePhương Trâm HuỳnhNo ratings yet
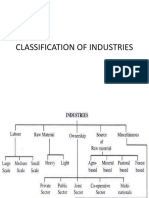
- Classification of IndustriesDocument8 pagesClassification of IndustriesOm Panchal100% (1)
- The Cuprex Metal Extraction Process: Recovering Copper From Sulfide OresDocument6 pagesThe Cuprex Metal Extraction Process: Recovering Copper From Sulfide OresAwaken69No ratings yet
- Fertilizer Industry Wastewater TreatmentDocument1 pageFertilizer Industry Wastewater TreatmentAnmol UpadhyayNo ratings yet
- Analysis of Harmonic Mitigation Methods For Building Wiring SystemsDocument8 pagesAnalysis of Harmonic Mitigation Methods For Building Wiring SystemsImranul KarimNo ratings yet
- The M. I. T. Network: AnalyzerDocument12 pagesThe M. I. T. Network: Analyzeraspirant AspiranturNo ratings yet
- 34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisDocument5 pages34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisZyad GhaziNo ratings yet
- Neural Networks May Be Future Help For RF/Microwave DesignersDocument4 pagesNeural Networks May Be Future Help For RF/Microwave DesignersPatrick JüschkeNo ratings yet
- Development of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatorDocument6 pagesDevelopment of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatortabendaaarzuNo ratings yet
- Vai 1999Document11 pagesVai 1999dsa sdsddsddsNo ratings yet
- A Survey of Power Estimation: Techniques in CircuitsDocument10 pagesA Survey of Power Estimation: Techniques in CircuitsTho Mai DucNo ratings yet
- A New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Document9 pagesA New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Ali H. NumanNo ratings yet
- A Programmable Analog Cellular Neural Network CMOS Chip For High Speed Image ProcessingDocument10 pagesA Programmable Analog Cellular Neural Network CMOS Chip For High Speed Image ProcessingPhùng Ngọc TânNo ratings yet
- NOSystem Identification of Power Converters Based On A Black-Box ApproachDocument11 pagesNOSystem Identification of Power Converters Based On A Black-Box ApproachJAIME JAVIER QUISPE PUMANo ratings yet
- Power System Dynamic Response Calculations: in M Each Involves in PerhapsDocument23 pagesPower System Dynamic Response Calculations: in M Each Involves in Perhapsjuan LuisNo ratings yet
- A Real-Time Dynamic Simulation Tool ForDocument5 pagesA Real-Time Dynamic Simulation Tool ForSyed GouseNo ratings yet
- A20 Behavioral 20 Modeling 20 Approach 20 To 20 The 20 Design 20 of 20 A 20 Low 20 Jitter 20 Clock 20 SourceDocument12 pagesA20 Behavioral 20 Modeling 20 Approach 20 To 20 The 20 Design 20 of 20 A 20 Low 20 Jitter 20 Clock 20 SourcehrishikeshNo ratings yet
- A4 Vovos Amathematicalmodelfordynamic....Document10 pagesA4 Vovos Amathematicalmodelfordynamic....Tharun KumarNo ratings yet
- A Modular Simulink-Based Controlled Three-Phase Switch Mode InverterDocument7 pagesA Modular Simulink-Based Controlled Three-Phase Switch Mode InverterLee EzzitouniNo ratings yet
- Design and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous MotorDocument7 pagesDesign and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous Motor22dr0302No ratings yet
- Applications of Fuzzy-Logic-Wavelet-Based Techniques For Transformers Inrush Currents Identification and Power Systems Faults ClassificationDocument7 pagesApplications of Fuzzy-Logic-Wavelet-Based Techniques For Transformers Inrush Currents Identification and Power Systems Faults ClassificationNandi ?No ratings yet
- Modeling, Simulation, and Verification of Large DC Power Electronics SystemsDocument7 pagesModeling, Simulation, and Verification of Large DC Power Electronics SystemsAndrés VareloNo ratings yet
- Fast Algorithms For IR Voltage Drop Analysis Exploiting LocalityDocument6 pagesFast Algorithms For IR Voltage Drop Analysis Exploiting LocalityOsama ElhadadNo ratings yet
- Control of Induction Motor Drive Using Artificial Neural Network (2014)Document7 pagesControl of Induction Motor Drive Using Artificial Neural Network (2014)leosensNo ratings yet
- Complex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersDocument15 pagesComplex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersMaikPortnoyNo ratings yet
- Ashraf 2014Document6 pagesAshraf 2014Chetan KotwalNo ratings yet
- 1 s2.0 0026269295000844 Main PDFDocument11 pages1 s2.0 0026269295000844 Main PDFAnonymous 78iAn6No ratings yet
- Modelling and Simulation of Armature-Controlled Direct Current Motor Using MATLABDocument7 pagesModelling and Simulation of Armature-Controlled Direct Current Motor Using MATLABRaj Bihari SinghNo ratings yet
- PubDat 188476Document15 pagesPubDat 188476Mohamed AlmortadaNo ratings yet
- Reform and Practice of Analog CircuitsDocument4 pagesReform and Practice of Analog CircuitsbrandonNo ratings yet
- Foreword For The Special Section On Analysis and Simulation of Very Large Power SystemsDocument3 pagesForeword For The Special Section On Analysis and Simulation of Very Large Power Systemsmirko.tNo ratings yet
- Speed Control of DC Motor Using Neural Network ConfigurationDocument4 pagesSpeed Control of DC Motor Using Neural Network Configurationtariq76No ratings yet
- 2010 Silva Power Grid Simulation (15132)Document10 pages2010 Silva Power Grid Simulation (15132)Fidel ParedesNo ratings yet
- Short Circuit Current CalculationDocument8 pagesShort Circuit Current CalculationRaulNo ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionDocument10 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionROHIT SINGHNo ratings yet
- Numerical Relay: Modern Multifunctional Protection SystemDocument4 pagesNumerical Relay: Modern Multifunctional Protection SystemAbhisekh AnandNo ratings yet
- Turning Signal Integrity Sim Inside OutDocument8 pagesTurning Signal Integrity Sim Inside OutRrox WolfNo ratings yet
- Direct Self Control of Induction Motor Based On Neural NetworkDocument9 pagesDirect Self Control of Induction Motor Based On Neural NetworksethukumarkNo ratings yet
- Artificial Neural Network Seminar ReportDocument15 pagesArtificial Neural Network Seminar ReportNeha Singh50% (2)
- 31-Definitions and Applications of Dynamic Average Models For Analysis of Power SystemsDocument15 pages31-Definitions and Applications of Dynamic Average Models For Analysis of Power SystemsZyad GhaziNo ratings yet
- 2005 PSC Ad CourseDocument4 pages2005 PSC Ad CoursesalagasimNo ratings yet
- Course Objectives and Course Outcomes - EXTCDocument14 pagesCourse Objectives and Course Outcomes - EXTCrehan_chouhanNo ratings yet
- Power Electronics For Hybrid Electric Vehicles - Application Brief PDFDocument2 pagesPower Electronics For Hybrid Electric Vehicles - Application Brief PDFSrashmiNo ratings yet
- Computer Power System AnalysisDocument155 pagesComputer Power System AnalysisSamir ElabasiryNo ratings yet
- Practica 4Document6 pagesPractica 4Saúl ContrerasNo ratings yet
- Pmu Power System ApplicationsDocument11 pagesPmu Power System Applicationsmrtksc54100% (1)
- Subharmonic Oscillations and Chaos in DC-DC Switching ConvertersDocument4 pagesSubharmonic Oscillations and Chaos in DC-DC Switching Convertersjai dNo ratings yet
- RGPV Syllabus Cbgs Ec 3 Sem All SubjectsDocument8 pagesRGPV Syllabus Cbgs Ec 3 Sem All SubjectsAyushNo ratings yet
- Intelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceDocument6 pagesIntelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceSunil PradhanNo ratings yet
- Vlsi Unit-VDocument41 pagesVlsi Unit-VJay SubbareddyNo ratings yet
- Monitoring Overvoltages in Underground HV Cable Distribution NetworksDocument6 pagesMonitoring Overvoltages in Underground HV Cable Distribution NetworkslalindadefNo ratings yet
- Neural Network Seminar ReportDocument17 pagesNeural Network Seminar ReportJainendra SinghNo ratings yet
- Vlsi Assingnment 1Document26 pagesVlsi Assingnment 1Info StudioNo ratings yet
- Recent Developments Induction Motor Drives Fault Diagnosis Using AI TechniquesDocument8 pagesRecent Developments Induction Motor Drives Fault Diagnosis Using AI Techniquesfahim47No ratings yet
- Constructing Online Testable CircuitsDocument9 pagesConstructing Online Testable CircuitsNandita RajasekaranNo ratings yet
- JJAP22Document11 pagesJJAP22Srinivasa RamanujamNo ratings yet
- Design of Fire Siren System Based On Power Line CarrierDocument15 pagesDesign of Fire Siren System Based On Power Line CarrierKIU PUBLICATION AND EXTENSIONNo ratings yet
- 1997 Temperature in Natural and Artificial SystemsDocument10 pages1997 Temperature in Natural and Artificial SystemsZxNo ratings yet
- 9bus System, Power FlowDocument17 pages9bus System, Power FlowZeeshan AhmedNo ratings yet
- S Parameters DesignDocument44 pagesS Parameters DesignPeterNo ratings yet
- A Review Approach of Power Grid Analysis in Vlsi Designs: August 2013Document7 pagesA Review Approach of Power Grid Analysis in Vlsi Designs: August 2013ThiruNo ratings yet
- Excitation Control of A Turbo-Generator by Using Artificial Neural NetworksDocument13 pagesExcitation Control of A Turbo-Generator by Using Artificial Neural Networksapi-19799369No ratings yet
- Watson 1999Document12 pagesWatson 1999dsa sdsddsddsNo ratings yet
- Thornton 1996Document9 pagesThornton 1996dsa sdsddsddsNo ratings yet
- A Review of Artificial Neural Networks Applications in Microwave Computer-Aided Design Invited ArticleDocument17 pagesA Review of Artificial Neural Networks Applications in Microwave Computer-Aided Design Invited Articledsa sdsddsddsNo ratings yet
- Hussey 1999Document4 pagesHussey 1999dsa sdsddsddsNo ratings yet
- Vai 1999Document11 pagesVai 1999dsa sdsddsddsNo ratings yet
- Smith 1998Document8 pagesSmith 1998dsa sdsddsddsNo ratings yet
- Review Article Perspectives On A New World Food Crisis: Pp. Pp. Pp. Xvi PPDocument9 pagesReview Article Perspectives On A New World Food Crisis: Pp. Pp. Pp. Xvi PPdsa sdsddsddsNo ratings yet
- Levine 1998Document1 pageLevine 1998dsa sdsddsddsNo ratings yet
- Radzilowski 1997Document4 pagesRadzilowski 1997dsa sdsddsddsNo ratings yet
- Casestudy: Bronner Slosberg HumphreyDocument18 pagesCasestudy: Bronner Slosberg Humphreydsa sdsddsddsNo ratings yet
- Concept Similarity and Conceptual Information Alteration Via English-to-Chinese and Chinese-to-English Translation of Medical Article TitlesDocument7 pagesConcept Similarity and Conceptual Information Alteration Via English-to-Chinese and Chinese-to-English Translation of Medical Article Titlesdsa sdsddsddsNo ratings yet
- Article Not Available Electronically 1999Document12 pagesArticle Not Available Electronically 1999dsa sdsddsddsNo ratings yet
- Burg Hartz 1998Document11 pagesBurg Hartz 1998dsa sdsddsddsNo ratings yet
- Article Not Available Electronically 1999Document20 pagesArticle Not Available Electronically 1999dsa sdsddsddsNo ratings yet
- Austin 1996Document21 pagesAustin 1996dsa sdsddsddsNo ratings yet
- Article Not Available Electronically 1999Document8 pagesArticle Not Available Electronically 1999dsa sdsddsddsNo ratings yet
- Article Not Available Electronically 1999Document13 pagesArticle Not Available Electronically 1999dsa sdsddsddsNo ratings yet
- Erratum Erin E. Irish, Jane A. Langdale, and Timothy Nelson. Interactions Between Tassel Seed Genes and Other Sex Determining Genes in MaizeDocument1 pageErratum Erin E. Irish, Jane A. Langdale, and Timothy Nelson. Interactions Between Tassel Seed Genes and Other Sex Determining Genes in Maizedsa sdsddsddsNo ratings yet
- Article Not Available Electronically 1998Document12 pagesArticle Not Available Electronically 1998dsa sdsddsddsNo ratings yet
- Python Programming LanguageDocument11 pagesPython Programming LanguageLoser To WinnerNo ratings yet
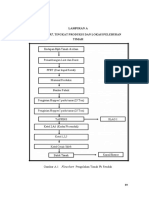
- Flowchart, Tingkat Produksi Dan Lokasi Peleburan: Lampiran ADocument11 pagesFlowchart, Tingkat Produksi Dan Lokasi Peleburan: Lampiran Aanton wibowoNo ratings yet
- C006a JDocument44 pagesC006a JVignesh WaranNo ratings yet
- Risk and Opportunity ProcedureDocument5 pagesRisk and Opportunity Procedureizu chuNo ratings yet
- IECEx TCD 02 Scheme Ed 8.1Document110 pagesIECEx TCD 02 Scheme Ed 8.1Luís Felipe SchrirNo ratings yet
- Hazard-Database Mining BAGUS SEKALIDocument1,156 pagesHazard-Database Mining BAGUS SEKALIherikNo ratings yet
- How To Negotiate SourcingDocument11 pagesHow To Negotiate SourcingTehzeeb FaizanNo ratings yet
- Study Machine Safety For Reduced Speed R-956Document114 pagesStudy Machine Safety For Reduced Speed R-956Margin SorinNo ratings yet
- De Guzman, Aeron Kyle DL. Reflection 3 (Moral Dilemma)Document1 pageDe Guzman, Aeron Kyle DL. Reflection 3 (Moral Dilemma)Aeron Kyle De GuzmanNo ratings yet
- Chapter 2 Web Services Delivered From The CloudDocument8 pagesChapter 2 Web Services Delivered From The Cloudali abbasNo ratings yet
- ASSR - AA - STF - NEW - L8 - PM8.2.4.1B - Payroll - Expense - SCOTs FormDocument11 pagesASSR - AA - STF - NEW - L8 - PM8.2.4.1B - Payroll - Expense - SCOTs FormHaley TranNo ratings yet
- Toro XL Tractor Service ManualDocument135 pagesToro XL Tractor Service Manualnone2244100% (1)
- Lower Modi Khola Hydroelectric Project (20 MW) : Parbat District, Western Nepal Karthik 2073Document19 pagesLower Modi Khola Hydroelectric Project (20 MW) : Parbat District, Western Nepal Karthik 2073Sandeep LamsalNo ratings yet
- BV Rules - Nr529Document144 pagesBV Rules - Nr529Vasiljka Đordan JelacaNo ratings yet
- Elsie W. Rudisill and Coal, Feed and Lumber Company, Inc. v. Southern Railway Company, 548 F.2d 488, 4th Cir. (1977)Document2 pagesElsie W. Rudisill and Coal, Feed and Lumber Company, Inc. v. Southern Railway Company, 548 F.2d 488, 4th Cir. (1977)Scribd Government DocsNo ratings yet
- Saep 349 PDFDocument41 pagesSaep 349 PDFRami ElloumiNo ratings yet
- Hhtfa8e ch01 SMDocument83 pagesHhtfa8e ch01 SMkbrooks323No ratings yet
- Toolbox Talks: Forklift FatalitiesDocument1 pageToolbox Talks: Forklift Fatalitiesserdar yücelNo ratings yet
- Jha - CowayDocument2 pagesJha - CowayNaethanNo ratings yet
- Philippines: 2016/4/8 News No. Date Comment PE0-MC-160025 Apr.,1,2016 COR:FIG.32 FLASHER LIGHT LIST CORRECTIONDocument53 pagesPhilippines: 2016/4/8 News No. Date Comment PE0-MC-160025 Apr.,1,2016 COR:FIG.32 FLASHER LIGHT LIST CORRECTIONLK JoaquinNo ratings yet
- Modified M.SC SyllabusDocument27 pagesModified M.SC SyllabusAbhishekBanerjeeNo ratings yet
- Catalogo Hidrofonos Teledyne Reson PDFDocument78 pagesCatalogo Hidrofonos Teledyne Reson PDFDalkis CruzNo ratings yet
- Ict1 July2014 ColorDocument289 pagesIct1 July2014 ColorLawrence ManaliliNo ratings yet
- Slurry Pumps Ar1 PDFDocument40 pagesSlurry Pumps Ar1 PDFsanjayagrawal70-1No ratings yet
- Test Bank For Human Resource Management 14Th Edition by Mondy Martocchio Isbn 9780133848809 0133848809 Full Chapter PDFDocument36 pagesTest Bank For Human Resource Management 14Th Edition by Mondy Martocchio Isbn 9780133848809 0133848809 Full Chapter PDFsimon.esche558100% (19)
- Pritam's ResumeDocument1 pagePritam's ResumeMahesh MitthaNo ratings yet