Download as pdf or txt
You might also like
- 【JESISIGMA-0001】SIGMA Di1 - 2 Rev2.0 PDFDocument31 pages【JESISIGMA-0001】SIGMA Di1 - 2 Rev2.0 PDFTaufik Hidayat Kurniansyah80% (10)
- A350 CB Switch Reset Finalrev2 PDFDocument38 pagesA350 CB Switch Reset Finalrev2 PDFaerologik_347746151100% (6)
- Onkyo TX-NR828 Service Manual PDFDocument99 pagesOnkyo TX-NR828 Service Manual PDFJaro100% (2)
- 3194 Service Manual Repeater 133-811Document28 pages3194 Service Manual Repeater 133-811adavit73100% (2)
- Schematic Diagram t240Document6 pagesSchematic Diagram t240dany weinfeldNo ratings yet
- Airbus A320 ATA 31 EIS PresentationDocument101 pagesAirbus A320 ATA 31 EIS Presentationcacad999No ratings yet
- Fault Codes PDFDocument204 pagesFault Codes PDFIzz Bahar100% (1)
- 02 A4-A3-e PDFDocument177 pages02 A4-A3-e PDFAttila KolesNo ratings yet
- Ddc-1 Valve Room Pacu 1A&1B: Data Point ListDocument2 pagesDdc-1 Valve Room Pacu 1A&1B: Data Point Listghared salehNo ratings yet
- DP NotationsDocument5 pagesDP NotationssandeepNo ratings yet
- Required Equipment For Cat2 and Cat3Document1 pageRequired Equipment For Cat2 and Cat3hansNo ratings yet
- Onkyo HT r391Document82 pagesOnkyo HT r391Eustalio PelasNo ratings yet
- ppm42s3x PDFDocument33 pagesppm42s3x PDFFlorea SorinNo ratings yet
- Bombardier Dash 8 Q400 Indicating - and - Recording - Systems PDFDocument139 pagesBombardier Dash 8 Q400 Indicating - and - Recording - Systems PDFSwapnil kapadiaNo ratings yet
- Start Up Sigma Solon LDDocument7 pagesStart Up Sigma Solon LDJesus Checa100% (1)
- Ir3225 3235 3245 General Circuit Diagram PDF FreeDocument16 pagesIr3225 3235 3245 General Circuit Diagram PDF Freetrongra2453No ratings yet
- Hardware Inventory 14-09-2023Document16 pagesHardware Inventory 14-09-2023UmerSabahNo ratings yet
- 890023-03-00 MX Quick StartDocument12 pages890023-03-00 MX Quick StartJose G LopezNo ratings yet
- End To End - DistanceDocument2 pagesEnd To End - DistanceRichard RegidorNo ratings yet
- Lyngso Marine A/S UMS/UCS 2100: Monitoring Channels ReportDocument2 pagesLyngso Marine A/S UMS/UCS 2100: Monitoring Channels Reportnitin9860No ratings yet
- FANUC机器人培训教材Document140 pagesFANUC机器人培训教材TommyNo ratings yet
- A340-Elev Redund LostDocument7 pagesA340-Elev Redund LostTimeo MarcopoulosNo ratings yet
- Regulatories Reqmts Table DPSDocument1 pageRegulatories Reqmts Table DPSNhậtBùiNo ratings yet
- Section 3B Advisory/Status Procedures: SubjectDocument6 pagesSection 3B Advisory/Status Procedures: SubjectDhinesh BalasubrmaniNo ratings yet
- 00-System-Terminology - Rev GDocument13 pages00-System-Terminology - Rev GROHAN MOHAPATRANo ratings yet
- Ilide - Info Ir3225 3235 3245 General Circuit Diagram PRDocument20 pagesIlide - Info Ir3225 3235 3245 General Circuit Diagram PRSenthil ArasuNo ratings yet
- Schematic Diagrams-02Document1 pageSchematic Diagrams-02Luis GarcíaNo ratings yet
- Pioneer DJM-850: TRAKTOR SCRATCH 2 Connection GuideDocument16 pagesPioneer DJM-850: TRAKTOR SCRATCH 2 Connection GuideJean Carlo LucianiNo ratings yet
- Schematic Diagrams: XV-N210B, XV-N212S, XV-N310B, XV-N312SDocument10 pagesSchematic Diagrams: XV-N210B, XV-N212S, XV-N310B, XV-N312SKo AzaniNo ratings yet
- Full-Differential Operational Amplifier: Kanazawa University Microelectronics Research Lab. Akio KitagawaDocument51 pagesFull-Differential Operational Amplifier: Kanazawa University Microelectronics Research Lab. Akio KitagawaKulanthaivelu RamaswamyNo ratings yet
- Micro Dome Surveillance Camera AD-02 PRO: Easy To InstallDocument1 pageMicro Dome Surveillance Camera AD-02 PRO: Easy To InstallSaji MathewsNo ratings yet
- DM15 SBS Jan 18 2001Document2 pagesDM15 SBS Jan 18 2001IvayloNo ratings yet
- Koyo Elevator: TKJ Specification: Travel: 42000 MM TKJ1350/2.5-12/12/12Document3 pagesKoyo Elevator: TKJ Specification: Travel: 42000 MM TKJ1350/2.5-12/12/12MAYESTONNo ratings yet
- Garmin G1000Document71 pagesGarmin G10006d5s2f2tgxNo ratings yet
- LCB Ii PDFDocument33 pagesLCB Ii PDFTomas Enrique Ramirez Gomez0% (1)
- 05-0136-A5 Control 2 Redline Et 11315 OV 011415Document16 pages05-0136-A5 Control 2 Redline Et 11315 OV 011415diego.manottiNo ratings yet
- PE2-User-Manual Fire PanelDocument15 pagesPE2-User-Manual Fire PanelsujiNo ratings yet
- Samsung HT-Q80, HT-Q70, HT-TQ72, HT-TQ85Document44 pagesSamsung HT-Q80, HT-Q70, HT-TQ72, HT-TQ85Luis Requena100% (1)
- Subwoofer: Downloaded From Manuals Search EngineDocument8 pagesSubwoofer: Downloaded From Manuals Search EngineMhouseMNo ratings yet
- Block Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Document8 pagesBlock Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Nei Vinicius Hercules Rodrigues MirandaNo ratings yet
- Kompsat2,3,3A - Imagery Products Order Form - v4.0Document4 pagesKompsat2,3,3A - Imagery Products Order Form - v4.0Vincent BLANQUENo ratings yet
- Atmega Instruction SummaryDocument4 pagesAtmega Instruction SummaryRafael nuñezNo ratings yet
- Configuration Overview: Simatic Pcs 7Document8 pagesConfiguration Overview: Simatic Pcs 7Phét Hay PhétNo ratings yet
- Engine Hood Courtesy Switch CircuitDocument26 pagesEngine Hood Courtesy Switch CircuitMichael KentNo ratings yet
- Remote Mimic Panel: Manual Revisions ListDocument17 pagesRemote Mimic Panel: Manual Revisions ListAleksei PodkopaevNo ratings yet
- 1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1Document4 pages1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1ass manNo ratings yet
- Chapter 2Document3 pagesChapter 2ATHIRA V RNo ratings yet
- CS104: Computer Organization: 2 April, 2020Document33 pagesCS104: Computer Organization: 2 April, 2020Om PrakashNo ratings yet
- Hawker 00XPC-Master Warning SystemDocument14 pagesHawker 00XPC-Master Warning SystemJose LaraNo ratings yet
- DCP - L8400DCN Parts ListDocument45 pagesDCP - L8400DCN Parts ListRafał Krzysztof KowalskiNo ratings yet
- DUL and DUS (2014) PDFDocument18 pagesDUL and DUS (2014) PDFАлексей РепехаNo ratings yet
- ZCDTL 01.40Document1 pageZCDTL 01.40Josh O SantiagoNo ratings yet
- Server Room Operator Room: ES4000-N2-RIO-U01Document3 pagesServer Room Operator Room: ES4000-N2-RIO-U01tutkuNo ratings yet
- NCR000067000 PartsCatalog EDocument47 pagesNCR000067000 PartsCatalog EciphardNo ratings yet
- Awa Le-32g90g Led TVDocument19 pagesAwa Le-32g90g Led TVmahedi aliNo ratings yet
- Manipulacion Del SpiderDocument6 pagesManipulacion Del SpiderJosé ChristianNo ratings yet
- 4T65E TransmisiónDocument10 pages4T65E Transmisiónfrancisco navaNo ratings yet
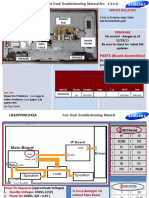
- Samsung LN32D550K1FXZA - Fast - Track - Troubleshooting ManualDocument4 pagesSamsung LN32D550K1FXZA - Fast - Track - Troubleshooting ManualArieskaNo ratings yet
- Sartech ARG5410 EPIRB TesterDocument3 pagesSartech ARG5410 EPIRB TesterEric Pskd100% (1)
- Applications Engineering Notebook: High Speed ADC Analog Input Interface ConsiderationsDocument15 pagesApplications Engineering Notebook: High Speed ADC Analog Input Interface Considerationskundu.banhimitraNo ratings yet
- LPWAN Research PaperDocument17 pagesLPWAN Research PaperthijsNo ratings yet
- Novel F-Shaped Quad-Band Printed Slot AnDocument4 pagesNovel F-Shaped Quad-Band Printed Slot AnSnehal VarbheNo ratings yet
- EC8551 CN Question BankDocument43 pagesEC8551 CN Question BankRaja Pirian100% (3)
- Wireless Communication NotesDocument29 pagesWireless Communication NotesRahul ChoudharyNo ratings yet
- Comfast Cfe325nDocument3 pagesComfast Cfe325nWifi MadrigalNo ratings yet
- Poly Phase Multifunction Energy Metering IC With Per Phase Information ADE7758Document68 pagesPoly Phase Multifunction Energy Metering IC With Per Phase Information ADE7758Kien TranNo ratings yet
- Viavi T-Berd/Mts: 8100-Series OTDR EVO ModulesDocument5 pagesViavi T-Berd/Mts: 8100-Series OTDR EVO Modulesrobert adamsNo ratings yet
- Decimation in Time AlgorithmDocument12 pagesDecimation in Time AlgorithmJane BNo ratings yet
- Cópia de Hytera HP70X Uv&V1 Service Manual V01 - EngDocument189 pagesCópia de Hytera HP70X Uv&V1 Service Manual V01 - EngALEX FERNANDESNo ratings yet
- 15ecl48-VTU-raghudathesh-Low Pass and High Pass FiltersDocument9 pages15ecl48-VTU-raghudathesh-Low Pass and High Pass FiltersraghudatheshgpNo ratings yet
- A Grounded CPW Transparent UWB Antenna For UHF and Microwave Frequency ApplicationDocument3 pagesA Grounded CPW Transparent UWB Antenna For UHF and Microwave Frequency ApplicationtanphuocdongNo ratings yet
- 3LABO Ganago Student Lab4Document46 pages3LABO Ganago Student Lab4Rocio Deidamia Puppi HerreraNo ratings yet
- 4096-Stage Low-Noise BBD Analog Delay Line V3205D/SD: General DescriptionDocument4 pages4096-Stage Low-Noise BBD Analog Delay Line V3205D/SD: General DescriptionDmedNo ratings yet
- What Is A DAC?: - A Digital To Analog Converter (DAC) Converts A Digital Signal To An Analog Voltage or Current OutputDocument18 pagesWhat Is A DAC?: - A Digital To Analog Converter (DAC) Converts A Digital Signal To An Analog Voltage or Current OutputRojan PradhanNo ratings yet
- CSIT 413 - Session 4Document63 pagesCSIT 413 - Session 4Ferdinand KatsrikuNo ratings yet
- 26G Radar Level MeterDocument14 pages26G Radar Level Meterilopera1971No ratings yet
- 1789-05 Hierarchical Cell StructureDocument31 pages1789-05 Hierarchical Cell StructureAnonymous g8YR8b9No ratings yet
- BCS-041 2016Document12 pagesBCS-041 2016Anonymous NBqG2Z0No ratings yet
- AAT SS CONTROL11to20-22-23Document5 pagesAAT SS CONTROL11to20-22-23krushnasamy subramaniyanNo ratings yet
- HW 10Document3 pagesHW 10rcantubaNo ratings yet
- Improving Privacy and Security in Multi-Authority Attribute-Based EncyptionDocument12 pagesImproving Privacy and Security in Multi-Authority Attribute-Based Encyptionselva kumarNo ratings yet
- Lecture 23 Intro To Optical Amplifiers PDFDocument12 pagesLecture 23 Intro To Optical Amplifiers PDF0938089460No ratings yet
- 5NPX1006F Product SpecificationsDocument3 pages5NPX1006F Product Specificationsnhan sieuNo ratings yet
- EST Chapter 3 Pages 40-48Document14 pagesEST Chapter 3 Pages 40-48Nico RobinNo ratings yet
- RF OptimizationDocument6 pagesRF OptimizationamitNo ratings yet
- Micropower Broadcasting PrimerDocument25 pagesMicropower Broadcasting PrimerStephen Dunifer80% (5)
- Matlab/Simulink Wireless Hdmi Model and Simulation: Dissertation Submitted To Obtain The Master (MSC) Degree inDocument78 pagesMatlab/Simulink Wireless Hdmi Model and Simulation: Dissertation Submitted To Obtain The Master (MSC) Degree inRohini SeetharamNo ratings yet
- Low-Loss MIMO Antenna Wireless Communication SysteDocument17 pagesLow-Loss MIMO Antenna Wireless Communication SysteAmbika ANo ratings yet