Volume 5, Issue 12, December – 2020 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Microcomputer Application in Motion Control
Muhtar H. Alhassan
Department of Computer Science
National Open University of Nigeria
Abuja
Abstract:- This paper briefly examines the microcomputer This paper focuses on the roles of the microcomputer
both as a control element and as a feedback-signal both as a control element and as a feedback-signal synthesizer
processor in modern closed-loop motion-control systems. in a closed-loop electric drive system.
Problems of interfacing, effective data-acquisition and
real-time control are briefly highlighted. II. INTERFACING
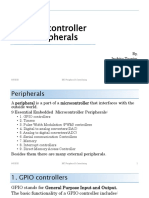
I. INTRODUCTION Interfacing is the means by which the microcomputer
bus can communicate with any peripheral device. It is the
The gradual replacement of analogue controllers for means by which a computer is connected to external
speed, position, torque, etc, with digital ones has facilitated equipment for data acquisition, monitoring or control. Signals
the evolution of the digital computer into one of the major coming from the external device must be transformed into a
components of modern motion control systems. Generally, form suitable for access by the computer. Similarly, any
the microcomputer when properly interfaced is suitable for signals generated by the computer for transmission to the
implementing several types of functions in a power electronic external device must be appropriately transformed before
based motion control system. These include: transmission to the equipment. The set-up is as shown in Fig.
1.
Gate-firing control of power converters,
PWM and step-wave signal generation, Thus, interfacing usually involves one or more of the
Feedback control loops following:
Signal Processing Electrical buffering
Sequencing control Data transmission control
Monitoring and warning Code conversion
Diagnostics Interrupt handling
Data conversion
Timing
Multiplexing
Fig 1:- Interfacing the computer to a control system
The IBM PCs and compatibles can only function as the computer’s expansion slots. A typical board, like the
effective tools in a data-acquisition / control context if they PC30A, includes 16 analogue input lines, 2 analogue output
are extended by the addition of appropriate expansion lines, 24 programmable I/O lines and usually a counter timer.
boards. Such boards are designed to plug directly into any of
IJISRT20DEC208 www.ijisrt.com 590
Volume 5, Issue 12, December – 2020 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Some non-IBM compatible machines, like the BBC In memory mapped I/O, the I/O lines are grouped in
microcomputer, come equipped with on-board A/D sets of 8, and each set is called a port and treated as a single
conversion capabilities. The 12-BIT A/D converter on the memory location. The ports are accessed using memory
BBC, which is usually the integrating type, can accept transfer instructions such as PEEK and POKE in BASIC, or
analogue inputs in the range between 0 and 1.8 volts. Here, LDA and STA in assembly language. Since memory
the upper range (1.8 volts) will produce the number 65520, addresses are used up for this type of I/O, communication is
which represents a 12-bit increment of 16. Thus in order to relatively slow.
obtain the normal 12-bit range of 0 to 4095, a division by 16
is necessary. Although there may be just one A/D converter In dedicated port addressed I/O, ports and channels
on-board a machine like the BBC, several analogue inputs are assigned unique addresses on a dedicated I/O bus. They
can be accommodated by multiplexing. Software access to are therefore accessed using additional software instructions
the A/D converter is provided by the BBC BASIC keyword like IN (INP) and OUT in low- or high-level programming
ADVAL (n) where n refers to the channel number (1, 2, 3 or languages.
4 in this case).
Direct memory access (DMA) is usually adopted when
III. SIGNAL CONDITIONING high sampling rates are required. Since non-DMA data-
acquisition techniques use program control for data transfer to
Signals generated from sensors in motion control memory, they have frequency limitations of about 100 kHz
systems are sometimes analogue in nature and generally must on the sampling rate [2]. DMA, on the other hand, is
be appropriately treated before they become suitable for hardware based, and with the help of tri-state buffers, causes
sampling by a computer. This is referred to as signal the microprocessor to momentarily be isolated from the
conditioning and can take any of the following forms: system buses so that the DMA device can directly access
Voltage Amplification: This helps to match the full-scale memory, thereby increasing the data transfer rate up to a
voltage change of a sensor output to the full-scale voltage possible 1 MHz.
range of the input interface. Thus, a sensor might produce
a voltage from 0V to 1mV full-scale whereas the input V. COMPUTER CONTROL
interface may linearly convert voltages in the range of 0 to
1.023 V to a digital number between 0 and 1023. In such a Microcomputer /digital control of electric drive systems
case, it becomes necessary to amplify the input signal by a has several advantages over analogue types, notable among
factor of 1023 to utilise the full digital range.Units which are:
Level Shifting: This refers to the alignment of the 1. Significant reduction in controller-hardware cost,
minimum sensor output voltage with the minimum voltage especially in systems using powerful VLSI
that can be converted by the input interface. For example, microcomputers with high speed and greater functional
if a sensor produces a voltage between –0.5 and 0.5 V, integration.
and the input interface converts a voltage between 0 to 1 2. Improved reliability leading to higher MTBF (mean
V to a digital number, a voltage of 0.5 V must be added to time-between-failures), due to the replacement of
the sensor output voltage to match the interface multiple electronic components by LSI and VLSI chips.
requirement. 3. Drift-free operation with minimal parameter variation.
Frequency-Range Limiting: This is effectively the 4. Possibility of implementing sophisticated control
filtering out of unwanted high-frequency components functions involving complex computations as for
from the input signal. Filtering can also be used to block a example in variable speed ac drives.
dc voltage component using a high-pass filter, or by ac 5. Easy implementation of such functions as temperature
coupling using a simple capacitor in series with the input monitoring, over current warning, etc.
signal.
Electrical Isolation: It is often necessary to electrically There are two notable limitations to the use of a
isolate signal generators from the computer to reduce the microcomputer in the control of an electric drive system:
effect of power-line voltage difference and noise that are 1. The introduction of quantisation error due to D/A and
usually generated when there is a common electric circuit A/D conversions. Increasing both the bit-size and the
connecting two physically separate systems. sampling rate can usually reduce this type of error.
2. A relatively sluggish response due to the serial way
IV. DATA ACQUISITION signals are processed in the microcomputer. Sluggishness
is most noticeable in centralised control of multi-drive
There are three main ways that the PC acquires data systems involving multitasking operations that tend to
from the outside world, namely. slow down conventional microprocessors. This situation
Memory Mapped I/O has improved tremendously with the development of
Dedicated Port Addressed I/O faster RISC type processors that can be used to produce
Direct Memory Access microcontrollers with excellent dynamic responses.
IJISRT20DEC208 www.ijisrt.com 591
Volume 5, Issue 12, December – 2020 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
VI. TYPES OF COMPUTER CONTROL VIII. THE PID CONTROLLER
The digital computer can play a variety of roles in The output equation for a PID controller is given by
motion control systems based on the strategy adopted. Thus
in Computer Supervisory Control, the controllers are de
essentially analogue with the computer accessing the drive v o K p e K i edt K d (1)
variables and generating driving signals for establishing the dt
desired set point.
where e is the error, vois the output and Kp, Ki and Kd
In Direct Digital Control, the computer directly are the proportional, integral and derivative coefficients of the
controls all the loops of the system. Thus the computer controller. The precise value of constants Kp, Ki and Kd
directly sets the driving power of each loop-actuator, loop by determine the quality of control of the system. Implementing
loop. A serious setback in this type of system is that the PID controller in a microcomputer requires the conversion
whenever the computer ‘goes down’ or ‘crashes’, all the of Equation 1 into a corresponding difference equation. First,
loops become open thereby making the system ‘runaway’. An both sides of the equation are differentiated with respect to
effective but rather expensive remedy is to have a stand-by time to obtain
computer acting as a monitor ready to take-over control when
things go wrong with the main machine.
(2)
Microprocessor control is a distributed type computer
control strategy, in which each loop of the system has its own Since computer implementation is discrete in nature, the
microprocessor or single-chip microcomputer. This method equation must now be transformed into the discrete mode
guarantees stability, self-tuning, remote re-programmability byreplacing continuous time with discrete time as follows:
and ease of implementation of complex algorithms for
compensating dead time delays and enhances the application
of feedforward control. (3)
In Integrated Computer Control, several Here, Ts is the cycle time, vois the change in output
microcomputer-based single-loop controllers are individually and e is error change. Thus
connected to a central computer referred to as a cell (4)
supervisor. The cell supervisor provides displays, keeps
records and issues commands to the individual loop (5)
controllers. In some cases, the supervising computer itself
reports to a higher-level management computer system.
The difference equation for the PID controller implies
Compatibility of physical, electrical and data structures in
that we compute the present value of the output based on the
such a system must be ensured by the adoption of standards
previous output, the present error, previous errors, the
such as the Manufacturing Automation Protocol (MAP)[3].
sampling time and the controller constants.
VII. IMPLEMENTING DIGITAL COMPENSATORS
IX. SOFTWARE CONSIDERATIONS
The block diagram of Fig.2 represents a
The PID equation can easily be implemented using a
microcomputer-based position control system. The
high-level language like C, Pascal, FORTRAN PL/M, and so
discontinuous nature of the power converter that usually feeds
on. Alternatively, an assembly language can be used for this
the motor is often neglected for the purpose of analysis. The
purpose. High-level implementation has the following
system is characterized by Multirate sampling, i.e. the various
advantages:
loops have different sampling times. Thus, the speed loop,
which usually has a large bandwidth, is characterized by a Possibility of using floating point arithmetic
smaller sampling time than that of the outer position loop. Automatic handling of negative numbers
Possibility of utilizing a math co-processor
In the position loop, the microcomputer samples the
command position , feedback position and updates the Assembly language programming would require the
separation of the PID equation into several smaller steps that
speed command * through the PI position controller all at are definable in the assembly language of the host processor.
a sampling rate of 1 . In the speed loop, the
T s1
Computer implementation of PID controllers, whether
software- or hardware-based, can lead to unstable response
microcomputer samples the speed command *, the for some specific combinations of the proportional gain Kp
feedback speed , and generates the q-axis current and the sampling time Ts especially in second-order systems.
Another setback is the fact, that derivative computations in a
I 1
*
command at a sampling rate of
sq
T s2
sampled-data system can produce unpredictable output jerks
due to the introduction of DAC related delays. This
IJISRT20DEC208 www.ijisrt.com 592
Volume 5, Issue 12, December – 2020 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
phenomenon makes the use of simple derivative controllers signals are not directly measurable, they have to be computed
usually undesirable. More sophisticated derivative from any that have been measured. This is an important area
computations are usually resorted to, if stability is to be of application for the microcomputer in feedback control. For
achieved. Alternatively, derivative action can be entirely example, in a PWM-inverter based AC drive system, it is
dropped so that a PI controller results. possible to synthesise such feedback signals as flux, torque,
and the like, from measured voltages and currents.
X. THE PI CONTROLLER
Another example of feedback signal synthesis is the
The transfer function of a PI controller has the form digital measurement of rotor speed from incremental position
signals generated by a simple incremental encoder. The pulse
C( s ) Ki train from the encoder is accumulated in a counter, and the
= Kp + (6) speed in rpm computed as
R( s ) s
(11)
In finite difference form, the transfer function becomes
where Ts is the sampling time in seconds, m is the
C( k + 1) − C( k ) R( k +1) − R( k ) number of encoder pulses in one sampling interval, and M is
= KiR( k ) + Kp[ ](7) the number of encoder pulses per revolution. The larger the
Ts Ts sampling period, the more accurate the speed measurement.
Furthermore, the pulses per revolution should be as high as
The smaller is Ts , the sampling time, the more accurate possible for a given sampling period. The sampling period is
is the representation of equation 6 by equation 7. Further limited by the bandwidth of the speed-control loop, whereas
manipulation of equation 8 yields the pulses per revolution are speed-sensor dependent. Thus in
the final analysis, a compromise has to be made between the
C( k + 1) = C( k ) + KpR( k + 1) + ( KiTs − Kp ) R( k )(8) accuracy with which the speed is estimated, and the
bandwidth of the speed loop. It should be noted, that at lower
For computer implementation, the difference equation is speeds, due to the fall in frequency of the encoder pulse train,
transformed into state variable form as follows: the method of pulse-interval measurement is usually adopted.
In this case the speed in rpm is obtained as
X ( k + 1) = AX ( k ) + BR( k ) (9)
(12)
C( k ) = MX ( k ) + NR( k ) (10)
where fcis the clock frequency in Hz, M is the encoder
Here X(k) is the state variable, A = 1, B = KiTs, M = 1 pulses per revolution, and n is the number of clock pulses in
and N = Kp. These equations can be easily implemented the interval Tw of the encoder pulse.
digitally. The gain coefficients are adjustable software
parameters that can be tuned experimentally using, say, the Tests and Diagnostics
Ziegler-Nicol’s method. Computer based tests and diagnostics of motor drive
systems are easily and quickly carried out either on-line or
XI. FEEDBACK SIGNAL SYNTHESIS off-line. In the first case, the tests are carried when the system
is in operation, with the microcomputer acquiring data and
Most modern strategies applied to the control of servo executing the necessary application in real time. In the second
drives rely on complete state feedback. Unfortunately, case, data obtained from the system while operating is
however, it is often impossible or very costly to monitor some analyzed separately on the microcomputer.
of the state variables. In such cases when some state feedback
Fig 2:- Multirate position control
IJISRT20DEC208 www.ijisrt.com 593
Volume 5, Issue 12, December – 2020 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
The level of skill needed to carry out even the most
complicated tests is considerably lowered. Furthermore,
because the microcomputer-based procedure is methodical,
there is little chance of faulty diagnosis. Also, the need for
sophisticated purpose-built test equipment is eliminated and
safety problems are minimal during the test.
Another advantage here is the possibility of making the
test highly automated without any need for user intervention.
XII. CONCLUSION
Some of the functions that can be implemented on a
digital computer in a closed loop motion control system have
been briefly described. The need for proper interfacing of the
microcomputer to the target control system has been
highlighted.
REFERENCES
[1]. BOSE, B.K.: ‘Technology Trends in Microcomputer
Control of Electrical Machines’,
IEEE Transactions on Industrial Electronics, 1989,35,
(1), pp 160 - 177.
[2]. BRICKWEDDE, A.: ‘Microprocessor-based adaptive
speed and position control for electrical drives’, IEEE
Transaction on Industry Applications, 1985, IA-21,
pp1154 - 1161.
[3]. FRASER, C.J and MILNE, J.S.: ‘Microcomputer
Application in Measurement Systems’,
Macmillan Education Ltd, Hounmills, 1990.
IJISRT20DEC208 www.ijisrt.com 594
You might also like
- Basics of PLCDocument75 pagesBasics of PLCjay bhavsar100% (4)
- Computing Machinery: Chapter 10: MicrocontrollersDocument51 pagesComputing Machinery: Chapter 10: MicrocontrollersAkanksha SrivastavaNo ratings yet
- Unit 3 System Interfacing and ControllersDocument48 pagesUnit 3 System Interfacing and ControllersSrinivasan V PNo ratings yet
- Chap 1Document92 pagesChap 1Arth PatelNo ratings yet
- 2 MarkDocument15 pages2 MarkGowthamanNo ratings yet
- Brown Final PPT FinalDocument36 pagesBrown Final PPT FinalDarshan100% (2)
- Direct Digital Control: Om Prakash BhartiDocument5 pagesDirect Digital Control: Om Prakash Bhartivictor alfonso campechano venturaNo ratings yet
- Introduction To Microprocessor-Based ControlDocument42 pagesIntroduction To Microprocessor-Based ControlAhdan FawwazNo ratings yet
- Project Introductive Seminar OnDocument26 pagesProject Introductive Seminar OnDarshanNo ratings yet
- "Speed Control and Protection of Induction Motor Using Internet of ThingDocument34 pages"Speed Control and Protection of Induction Motor Using Internet of ThingDarshan0% (1)
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentDocument84 pages25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraNo ratings yet
- Chen Xi2012Document4 pagesChen Xi2012gowthamnm.nieNo ratings yet
- Integrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Document31 pagesIntegrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Sunil PillaiNo ratings yet
- Field Monitoring and Automation Using Iot in AgricultureDocument114 pagesField Monitoring and Automation Using Iot in AgriculturedileeppatraNo ratings yet
- White Paper - Data Communication in Substation Automation System SAS - Part 1 Original 23353Document5 pagesWhite Paper - Data Communication in Substation Automation System SAS - Part 1 Original 23353sabrahimaNo ratings yet
- PLC ScadaDocument30 pagesPLC ScadaNeeraj Mishra100% (1)
- Index: A. About KielDocument73 pagesIndex: A. About KieldileeppatraNo ratings yet
- 2 Data Acquisition SystemsDocument38 pages2 Data Acquisition SystemsumarsaboNo ratings yet
- Digital RelaysDocument12 pagesDigital RelaysAbdullah Yahya0% (1)
- Computer-Process Interface For Data Acquisition and ControlDocument8 pagesComputer-Process Interface For Data Acquisition and ControlVidisha JhaNo ratings yet
- Unit Iv - The Microcontroller Connections 1.hardware Interface SequencingDocument9 pagesUnit Iv - The Microcontroller Connections 1.hardware Interface SequencingAshwin Prabhu .M VISTASNo ratings yet
- Periphrals & Interfacing BasicsDocument31 pagesPeriphrals & Interfacing Basicshefawoj62No ratings yet
- PLC QuestionsDocument17 pagesPLC QuestionsbahyNo ratings yet
- This Following BMS Interview Questions and Answer Purely Focused On Testing and Commissioning EngineerDocument16 pagesThis Following BMS Interview Questions and Answer Purely Focused On Testing and Commissioning Engineerjahangir samiNo ratings yet
- PQM IiDocument6 pagesPQM Iimuthakker100% (1)
- Unit 5Document91 pagesUnit 5eie.vgnt2023No ratings yet
- Andriod Mobile Controlled Door Security Locking System by Using TCP-IPDocument66 pagesAndriod Mobile Controlled Door Security Locking System by Using TCP-IPAsra AfsheenNo ratings yet
- Data Acquisition: Fig 2.1:-Parts of Measurement SystemDocument16 pagesData Acquisition: Fig 2.1:-Parts of Measurement SystemHayder AliNo ratings yet
- PCI Module 5 PDFDocument35 pagesPCI Module 5 PDFjaya kingNo ratings yet
- Power Theft Intimation SystemDocument24 pagesPower Theft Intimation SystemSachin JoseNo ratings yet
- 2.microcontroller Based Transformer Health Monitoring System Using IotDocument38 pages2.microcontroller Based Transformer Health Monitoring System Using IotDinesh KumarNo ratings yet
- Virtual Panel LabviewDocument6 pagesVirtual Panel LabviewMunavar HussainNo ratings yet
- (FALL 2007) : Bs Electronics Engineering Final Year Project ProposalDocument9 pages(FALL 2007) : Bs Electronics Engineering Final Year Project Proposalarif_khan07100% (1)
- Bourns Smart Meter White PaperDocument9 pagesBourns Smart Meter White PaperGarima SarupriaNo ratings yet
- Control Sysytems by SuklaDocument51 pagesControl Sysytems by Suklavinay kumar MNo ratings yet
- Special Function IODocument31 pagesSpecial Function IOِAbdul-Rahman Al-magidiNo ratings yet
- 02 DCS Architecture IODocument10 pages02 DCS Architecture IOJOSEPH LORENZ RODRIGUEZNo ratings yet
- Controller Area Network For Monitoring and Controlling The Industrial Parameters Using Bluetooth CommunicationDocument3 pagesController Area Network For Monitoring and Controlling The Industrial Parameters Using Bluetooth CommunicationIjsrnet EditorialNo ratings yet
- E-Notice Board Using GSM and Microcontroller: Project Presentation OnDocument25 pagesE-Notice Board Using GSM and Microcontroller: Project Presentation OnBandesh KumarNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument8 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- ATM Terminal Design Based On Figure Print Recognition DocuDocument115 pagesATM Terminal Design Based On Figure Print Recognition DocuPraveen NaiduNo ratings yet
- 6MB Telecontrol System: 6MB552 Compact Remote Terminal UnitDocument12 pages6MB Telecontrol System: 6MB552 Compact Remote Terminal Unitfayssal salvadorNo ratings yet
- MechatronicsDocument41 pagesMechatronicssalunkens100% (2)
- Remote Terminal Unit (RTU)Document5 pagesRemote Terminal Unit (RTU)deepika srivastavaNo ratings yet
- Dokumen - Tips - Advanced Energy MeterDocument7 pagesDokumen - Tips - Advanced Energy Metergurrala rajkumarNo ratings yet
- Iaa Unit 04Document19 pagesIaa Unit 04SurajNo ratings yet
- Secure Data CommunicationDocument11 pagesSecure Data CommunicationNeela ChennurNo ratings yet
- Smart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RDocument6 pagesSmart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RLogapriya ViswanathanNo ratings yet
- Wireless Handheld Ordering Terminal Based On Embedded SystemDocument6 pagesWireless Handheld Ordering Terminal Based On Embedded SystemGaurav PohujaNo ratings yet
- Data Acquisition Systems: Assignment EC375-Measurements and InstrumentationDocument10 pagesData Acquisition Systems: Assignment EC375-Measurements and InstrumentationAfrasinei Sergiu VladNo ratings yet
- Basic of PLCDocument75 pagesBasic of PLCJAY BHAVSAR50% (2)
- Ijser: GUI Based Device Controller Using MATLABDocument4 pagesIjser: GUI Based Device Controller Using MATLABpiyushji125No ratings yet
- Communication Antenna Switching System Based On Micro ControllerDocument4 pagesCommunication Antenna Switching System Based On Micro ControllerAjay Kumar YadavNo ratings yet
- MT6603 DMS Unt 3 PDFDocument39 pagesMT6603 DMS Unt 3 PDFKarthi KeyanNo ratings yet
- Prepaid Energy Meter Under The Guidance Of: Project TitleDocument24 pagesPrepaid Energy Meter Under The Guidance Of: Project Titlesangeetha sangeethaNo ratings yet
- Application of Scada in Power Transmission and DistributionDocument12 pagesApplication of Scada in Power Transmission and DistributionajitborseNo ratings yet
- Telemetry Assignment: Submitted By: Singh Kushagra Harilal Ei-H 0909732109Document47 pagesTelemetry Assignment: Submitted By: Singh Kushagra Harilal Ei-H 0909732109Shashank SrivastavaNo ratings yet
- Iaa Unit 04Document19 pagesIaa Unit 04SurajNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument23 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- Analysis of Opaque, Peel-Off and Flex Rejects in the Electro Plating Process Using the Six Sigma Dmaic MethodDocument18 pagesAnalysis of Opaque, Peel-Off and Flex Rejects in the Electro Plating Process Using the Six Sigma Dmaic MethodInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Study to Effect of Reminiscence Therapy on Psychological Well-Being among Elderly Residing in Selected Old Age HomeDocument5 pagesA Study to Effect of Reminiscence Therapy on Psychological Well-Being among Elderly Residing in Selected Old Age HomeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectDocument12 pagesApplication of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Comprehensive Review on the Therapeutic Potential of PectinDocument6 pagesA Comprehensive Review on the Therapeutic Potential of PectinInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkDocument15 pagesApplication of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaDocument5 pagesA Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyDocument12 pagesThe Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quality Control to Reduce Appearance Defects at PT. Musical InstrumentDocument11 pagesQuality Control to Reduce Appearance Defects at PT. Musical InstrumentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Forecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityDocument10 pagesForecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Analysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZDocument10 pagesAnalysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersDocument5 pagesQuizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Enhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataDocument6 pagesEnhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Entrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasDocument9 pagesEntrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Role of Leadership Training in Developing Effective Police SupervisorsDocument17 pagesThe Role of Leadership Training in Developing Effective Police SupervisorsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Health Care - An Android Application Implementation and Analyzing user Experience Using PythonDocument7 pagesHealth Care - An Android Application Implementation and Analyzing user Experience Using PythonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierDocument4 pagesIntrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Synthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.Document21 pagesSynthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.International Journal of Innovative Science and Research TechnologyNo ratings yet
- Visitor Perception Related to the Quality of Service in Todo Tourism VillageDocument10 pagesVisitor Perception Related to the Quality of Service in Todo Tourism VillageInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoDocument9 pagesGravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Developing Digital Fluency in Early Education: Narratives of Elementary School TeachersDocument11 pagesDeveloping Digital Fluency in Early Education: Narratives of Elementary School TeachersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Model of Rating to Evaluate Start-ups in Emerging Indian MarketDocument7 pagesA New Model of Rating to Evaluate Start-ups in Emerging Indian MarketInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareDocument14 pagesA Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Financial Prudence as Determinant of Employees’ Interest in Graduate StudyDocument13 pagesFinancial Prudence as Determinant of Employees’ Interest in Graduate StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design and Implementation of Software-Defined ReceiverDocument8 pagesDesign and Implementation of Software-Defined ReceiverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyDocument5 pagesOptimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Crop Monitoring System with Water Moisture Levels Using ControllerDocument8 pagesCrop Monitoring System with Water Moisture Levels Using ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Inclusive Leadership in the South African Police Service (SAPS)Document26 pagesInclusive Leadership in the South African Police Service (SAPS)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Naturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesDocument9 pagesNaturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Fahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceDocument8 pagesFahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Year Wise Analysis and Prediction of Gold RatesDocument8 pagesYear Wise Analysis and Prediction of Gold RatesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Conductivity MeterDocument23 pagesConductivity MeterSachin VaisayNo ratings yet
- ICOM IC-756 PRO2 Service Manual PDFDocument105 pagesICOM IC-756 PRO2 Service Manual PDFDavid NybergNo ratings yet
- Arduino Cheat Sheet: Basics 1: Using Digital I/O, Analog Reading, Serial As Output, Basic TimerDocument3 pagesArduino Cheat Sheet: Basics 1: Using Digital I/O, Analog Reading, Serial As Output, Basic TimerSriHariKalyanBNo ratings yet
- Lm35 With PicDocument11 pagesLm35 With PicbalabooksNo ratings yet
- Spacelabs 90217 Ambulatory Blood Pressure Monitor - Service ManualDocument62 pagesSpacelabs 90217 Ambulatory Blood Pressure Monitor - Service ManualsozuakNo ratings yet
- Unit 4 SadDocument18 pagesUnit 4 SadSahithi HimabinduNo ratings yet
- ADAU1761Document92 pagesADAU1761Constantine SinanasNo ratings yet
- 7th Sense Multipurpose RobotDocument50 pages7th Sense Multipurpose Robotashok3manjuNo ratings yet
- Complete Front End Solutions For Weigh Scales PDFDocument5 pagesComplete Front End Solutions For Weigh Scales PDFmahamd saiedNo ratings yet
- PIC16F506Document6 pagesPIC16F506Srinivas VemuriNo ratings yet
- BlackbookDocument42 pagesBlackbookJyotsna AnandNo ratings yet
- RESET ADS-R Manual en 0118Document20 pagesRESET ADS-R Manual en 0118Daniel ZuñigaNo ratings yet
- Daq2000 Data AcqDocument11 pagesDaq2000 Data AcqPhi MacNo ratings yet
- Zynq UltraScale+ RFSoCDocument378 pagesZynq UltraScale+ RFSoCmatrixNo ratings yet
- Modbus TableDocument67 pagesModbus TableNutchaiSaengsurathamNo ratings yet
- AplctnDocument8 pagesAplctnNoble BrightNo ratings yet
- M.tech Electronics Communication EngineeringDocument72 pagesM.tech Electronics Communication EngineeringHemant IngaleNo ratings yet
- Multiplexeur Acces E1 T1 MDSL LOOP AM3440Document21 pagesMultiplexeur Acces E1 T1 MDSL LOOP AM3440Tạo TrầnNo ratings yet
- ABEM Terrameter LS-2PDocument2 pagesABEM Terrameter LS-2PPromise NyamhuteNo ratings yet
- Blue Eyes Technology.Document8 pagesBlue Eyes Technology.Nirosh KumarNo ratings yet
- Technical Requirements of RtuDocument34 pagesTechnical Requirements of RtuJoshua GarbinNo ratings yet
- ECG ThesisDocument40 pagesECG ThesisMirza MehranNo ratings yet
- Ad8421 PDFDocument28 pagesAd8421 PDFsoft4gsmNo ratings yet
- Unit - 1 Introduction To MechatronicsDocument106 pagesUnit - 1 Introduction To Mechatronicsaman100% (1)
- Bionics IFM-500 - Service ManualDocument82 pagesBionics IFM-500 - Service ManualrudyvarsaNo ratings yet
- IoT Based Wearable Smart Health Monitoring SystemDocument18 pagesIoT Based Wearable Smart Health Monitoring SystemRutuja VartaleNo ratings yet
- A - D and D - A Conversion Lecture 6Document22 pagesA - D and D - A Conversion Lecture 6ljjbNo ratings yet
- Chapter13 Transceiver Design ExampleDocument72 pagesChapter13 Transceiver Design ExampleNikunj Shah100% (1)
- Automated Zone Speci C Irrigation With Wireless Sensor Actuator Network and Adaptable Decision SupportDocument28 pagesAutomated Zone Speci C Irrigation With Wireless Sensor Actuator Network and Adaptable Decision SupportNakal Hans Beta VersionNo ratings yet
- Experimental Modal AnalysisDocument11 pagesExperimental Modal Analysisrs0004No ratings yet