Download as pdf or txt
You might also like
- Process Dynamics and Control, Ch. 15 Solution ManualDocument20 pagesProcess Dynamics and Control, Ch. 15 Solution ManualBen SpearmanNo ratings yet
- Aneesa Mughal Paper 07-11-2012Document21 pagesAneesa Mughal Paper 07-11-2012Muhammad Aamir JavedNo ratings yet
- Study of Common Fixed Point Result of Pair of Self Maps in G-Metric SpaceDocument5 pagesStudy of Common Fixed Point Result of Pair of Self Maps in G-Metric SpaceIJAR JOURNALNo ratings yet
- M402C8Document11 pagesM402C8VASUNo ratings yet
- Definition 15 Suppose That (: Probabilistic Q ROLNS Aggregation OperatorsDocument1 pageDefinition 15 Suppose That (: Probabilistic Q ROLNS Aggregation Operatorsvsk.trashNo ratings yet
- Simpson-Mercer (File 1) (13, June)Document16 pagesSimpson-Mercer (File 1) (13, June)Qurat Ul Ain TariqNo ratings yet
- Topo Gal PDFDocument2 pagesTopo Gal PDFadouericNo ratings yet
- Algebra Qual S08Document6 pagesAlgebra Qual S08uppsNo ratings yet
- A Majorcan Algebrist in King RNA's CourtDocument41 pagesA Majorcan Algebrist in King RNA's CourtCesc RosselloNo ratings yet
- Herstein Topics in Algebra Solution 2.13Document7 pagesHerstein Topics in Algebra Solution 2.13Under TakerNo ratings yet
- Quadratic Iterations To Π Associated With Elliptic Functions To The Cubic And Septic BaseDocument16 pagesQuadratic Iterations To Π Associated With Elliptic Functions To The Cubic And Septic BaseRenee BravoNo ratings yet
- 10.1216@RMJ 2017 47 8 2723Document8 pages10.1216@RMJ 2017 47 8 2723Mircea MercaNo ratings yet
- On A New Class of Integrals Involving Generalized Mittag-Leffler FunctionDocument9 pagesOn A New Class of Integrals Involving Generalized Mittag-Leffler FunctionLuis Alberto FuentesNo ratings yet
- Lemma 5. 7. 2Document8 pagesLemma 5. 7. 2Kesava Raman VNo ratings yet
- Reading: March 8, 2010 17:54 WSPC/S0219-4988 171-JAA 00393Document10 pagesReading: March 8, 2010 17:54 WSPC/S0219-4988 171-JAA 00393harishNo ratings yet
- Er Graph MatchingDocument5 pagesEr Graph MatchingsnpuploadNo ratings yet
- The Regularity of Some Families of Circulant GraphsDocument13 pagesThe Regularity of Some Families of Circulant GraphssonicaNo ratings yet
- On Energy of Graphs: Kinkar Ch. Das, Suresh ElumalaiDocument6 pagesOn Energy of Graphs: Kinkar Ch. Das, Suresh ElumalaiTache Alexandru-PetreNo ratings yet
- PPNCKHDocument12 pagesPPNCKHtamvothitam4No ratings yet
- ArganbrightDocument8 pagesArganbrightviji.z.thomasNo ratings yet
- 1 s2.0 S0264370704000377 MainDocument8 pages1 s2.0 S0264370704000377 MainBRENNIE CAROLINA BUSTOS DE LA FUENTENo ratings yet
- Chap 3Document11 pagesChap 3eklogoNo ratings yet
- Annamalai NotesDocument40 pagesAnnamalai NotesgauravpNo ratings yet
- 1 s2.0 S0022314X16301299 MainDocument19 pages1 s2.0 S0022314X16301299 MainMircea MercaNo ratings yet
- Anna Notes8Document39 pagesAnna Notes8govindaraju annamalaiNo ratings yet
- 1 s2.0 S0022314X16000780 Main PDFDocument22 pages1 s2.0 S0022314X16000780 Main PDFLAXMI MAJHINo ratings yet
- Nayandeep Deka Baruah, Nipen Saikia - Some General Theorems On The Explicit Evaluations of Ramanujan's Cubic Continued Fraction - J. Comput. and Appl. Math. 160 (2003) 37-51Document15 pagesNayandeep Deka Baruah, Nipen Saikia - Some General Theorems On The Explicit Evaluations of Ramanujan's Cubic Continued Fraction - J. Comput. and Appl. Math. 160 (2003) 37-51Renee BravoNo ratings yet
- The Gcd-Sum Function: Article 01.2.2 Journal of Integer Sequences, Vol. 4 (2001)Document19 pagesThe Gcd-Sum Function: Article 01.2.2 Journal of Integer Sequences, Vol. 4 (2001)harsh bhambhaniNo ratings yet
- Note On A Conjecture For The Sum of Signless Laplacian EigenvaluesDocument10 pagesNote On A Conjecture For The Sum of Signless Laplacian EigenvaluesGuilherme PortoNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Decomposition Theorem For Chromatic PolynomialDocument7 pagesDecomposition Theorem For Chromatic Polynomialparmar003akashNo ratings yet
- 1 S5 PDFDocument85 pages1 S5 PDF너굴No ratings yet
- Interlacing and Bounds of Zeros of Quasi-Orthogonal Little Q-Jacobi PolynomialsDocument14 pagesInterlacing and Bounds of Zeros of Quasi-Orthogonal Little Q-Jacobi Polynomialspranaygoswami1983No ratings yet
- 09 Chapter 14Document32 pages09 Chapter 14TamilNo ratings yet
- MAS 305 Algebraic Structures II: Notes 3 Autumn 2006Document9 pagesMAS 305 Algebraic Structures II: Notes 3 Autumn 2006MarlydTalakuaNo ratings yet
- Lec 07 QuicksortDocument15 pagesLec 07 Quicksortcoco finaNo ratings yet
- Finite Groups With Specific Number of Cyclic Subgroups: AbstractDocument10 pagesFinite Groups With Specific Number of Cyclic Subgroups: Abstractmosesms252No ratings yet
- Generating FunctionsDocument6 pagesGenerating FunctionsEverton ArtusoNo ratings yet
- Final - Report - 96 - (Generalized Honeycomb Torus Is Hamiltonian)Document21 pagesFinal - Report - 96 - (Generalized Honeycomb Torus Is Hamiltonian)davidsmcNo ratings yet
- Symmetric GroupDocument13 pagesSymmetric GroupPriyanka PatelNo ratings yet
- Economics 1011a Problem 4Document9 pagesEconomics 1011a Problem 4Stefan SpataruNo ratings yet
- Fa IiDocument62 pagesFa Ii이강민No ratings yet
- Algebra (Dummit) HW 1Document15 pagesAlgebra (Dummit) HW 1homanho2021No ratings yet
- GeorgiaTech CS-6515: Graduate Algorithms: First Exam Material Flashcards by Alex O'Sullivan - BrainscapeDocument6 pagesGeorgiaTech CS-6515: Graduate Algorithms: First Exam Material Flashcards by Alex O'Sullivan - BrainscapeJan_SuNo ratings yet
- Polar Plot and Its Analysis GATE Study Material in PDFDocument6 pagesPolar Plot and Its Analysis GATE Study Material in PDFimvuuser1No ratings yet
- Heims Mass Formula 1982Document10 pagesHeims Mass Formula 1982salah mebarekNo ratings yet
- Hungerford Solution 2groupDocument14 pagesHungerford Solution 2group23SquareNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- OmegaDocument2 pagesOmegaDavid EnglandNo ratings yet
- Quantum Field Theory Solution To Exercise Sheet No. 9: Exercise 9.1: One Loop Renormalization of QED A)Document20 pagesQuantum Field Theory Solution To Exercise Sheet No. 9: Exercise 9.1: One Loop Renormalization of QED A)julian fischerNo ratings yet
- JAS - Volume 11 - Issue 1 - Pages 1-14Document14 pagesJAS - Volume 11 - Issue 1 - Pages 1-14Amit SehgalNo ratings yet
- An Integral of Dedekind Eta-Functions in Ramanujan's Lost NotebookDocument7 pagesAn Integral of Dedekind Eta-Functions in Ramanujan's Lost Notebookapi-26401608No ratings yet
- Article Yuxin GeDocument35 pagesArticle Yuxin Gededel7No ratings yet
- Zone A SPM Mock Exam 2008 Marking Scheme For Paper 2 and Answer For Paper 1 (Mathematics)Document16 pagesZone A SPM Mock Exam 2008 Marking Scheme For Paper 2 and Answer For Paper 1 (Mathematics)Sean GomezNo ratings yet
- On The Signless Laplacian Spectral Radius of Some GraphsDocument3 pagesOn The Signless Laplacian Spectral Radius of Some Graphsivy_publisherNo ratings yet
- Great Circle Route and Its Plotting On Chart ProjeDocument8 pagesGreat Circle Route and Its Plotting On Chart ProjeEka Juang SantikaNo ratings yet
- Ireland Rosen Chapters 7 8 PDFDocument34 pagesIreland Rosen Chapters 7 8 PDFShamil HussainNo ratings yet
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132From EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132No ratings yet
- Sweet Baby Dresses in Crochet: 4 Dresses in Sizes Newborn to 24 Months, with Matching AccessoriesFrom EverandSweet Baby Dresses in Crochet: 4 Dresses in Sizes Newborn to 24 Months, with Matching AccessoriesRating: 4 out of 5 stars4/5 (2)
- Notes On The Moore-Penrose Inverse of A Linear Combination of Commuting Generalized and Hypergeneralized ProjectorsDocument7 pagesNotes On The Moore-Penrose Inverse of A Linear Combination of Commuting Generalized and Hypergeneralized ProjectorsVelmurugan mNo ratings yet
- A New Generalized Inverse of Matrices From core-EP DecompositionDocument24 pagesA New Generalized Inverse of Matrices From core-EP DecompositionVelmurugan mNo ratings yet
- TN03600413 Application Number: 201610211842: Test DetailsDocument4 pagesTN03600413 Application Number: 201610211842: Test DetailsVelmurugan mNo ratings yet
- On General Matrix Application of Quasi Power Increasing SequencesDocument10 pagesOn General Matrix Application of Quasi Power Increasing SequencesVelmurugan mNo ratings yet
- 32 R1358 AAM Adel MA 122319 Published 121020Document8 pages32 R1358 AAM Adel MA 122319 Published 121020Velmurugan mNo ratings yet
- Inverse Spectral Problems For Spectral Data and Two Spectra of by Tridiagonal Almost-Symmetric MatricesDocument13 pagesInverse Spectral Problems For Spectral Data and Two Spectra of by Tridiagonal Almost-Symmetric MatricesVelmurugan mNo ratings yet
- Some Results of Double Sequences in 2-Normed and - Normed SpacesDocument9 pagesSome Results of Double Sequences in 2-Normed and - Normed SpacesVelmurugan mNo ratings yet
- Relation Between Hilbert Algebras and BE-Algebras: A. Rezaei, A. Borumand Saeid, R. A. BorzooeiDocument12 pagesRelation Between Hilbert Algebras and BE-Algebras: A. Rezaei, A. Borumand Saeid, R. A. BorzooeiVelmurugan mNo ratings yet
- SI0415 AAM MT 110418 Posted 032119 PDFDocument20 pagesSI0415 AAM MT 110418 Posted 032119 PDFVelmurugan mNo ratings yet
- The Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsDocument12 pagesThe Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsVelmurugan mNo ratings yet
- Important Notice Sub:-Combined Higher Secondary (10+2) Level Examination, 2020-RegDocument1 pageImportant Notice Sub:-Combined Higher Secondary (10+2) Level Examination, 2020-RegVelmurugan mNo ratings yet
- M Velmurugan Annamalai UniversityDocument1 pageM Velmurugan Annamalai UniversityVelmurugan mNo ratings yet
- MSC BotDocument94 pagesMSC BotVelmurugan mNo ratings yet
- Bio Data: Personal DetailsDocument2 pagesBio Data: Personal DetailsVelmurugan mNo ratings yet
- Research Article: Some Results On Characterizations of Matrix Partial OrderingsDocument7 pagesResearch Article: Some Results On Characterizations of Matrix Partial OrderingsVelmurugan mNo ratings yet
- Annamalai University: Post-Graduate Programmes (Self Supporting) Faculty of MedicineDocument12 pagesAnnamalai University: Post-Graduate Programmes (Self Supporting) Faculty of MedicineVelmurugan mNo ratings yet
- Notification in English PDFDocument1 pageNotification in English PDFVelmurugan mNo ratings yet
- Jawaharlal Institute of Postgraduate Medical Education and ResearchDocument5 pagesJawaharlal Institute of Postgraduate Medical Education and ResearchVelmurugan mNo ratings yet
- Eligibility - Affiliated GovernmentDocument1 pageEligibility - Affiliated GovernmentVelmurugan mNo ratings yet
- Which Is Allotted /re Allotted in MOP UP RoundDocument1 pageWhich Is Allotted /re Allotted in MOP UP RoundVelmurugan mNo ratings yet
- School of Excellence in Law (SOEL) EligibilityDocument1 pageSchool of Excellence in Law (SOEL) EligibilityVelmurugan mNo ratings yet
- Jawaharlal Institute of Post-Graduate Medical Education & ResearchDocument2 pagesJawaharlal Institute of Post-Graduate Medical Education & ResearchVelmurugan mNo ratings yet
- 6.find 10 7.state Leibnitz Theorem. 8.write The Cartesian Formula For Radius of CurvatureDocument3 pages6.find 10 7.state Leibnitz Theorem. 8.write The Cartesian Formula For Radius of CurvatureVelmurugan mNo ratings yet
- Máça® Nj®Î Thça, BR Id - 6 G Âçif BrœâDocument1 pageMáça® Nj®Î Thça, BR Id - 6 G Âçif BrœâVelmurugan mNo ratings yet
- Operator ExtensonDocument49 pagesOperator ExtensonVelmurugan mNo ratings yet
- Fee Structure PDFDocument1 pageFee Structure PDFVelmurugan mNo ratings yet
- Quasi-Isometries: Kevin Whyte Berkeley Fall 2007Document20 pagesQuasi-Isometries: Kevin Whyte Berkeley Fall 2007Velmurugan mNo ratings yet
- DAE Printing and Graphic Arts Technology PDFDocument158 pagesDAE Printing and Graphic Arts Technology PDFM Shumraiz SharifNo ratings yet
- Laplacian Matrices of GraphDocument34 pagesLaplacian Matrices of Graphlennon757No ratings yet
- Hazewinkel M. (Ed.) Encyclopaedia of Mathematics. Supplement I 1997Document594 pagesHazewinkel M. (Ed.) Encyclopaedia of Mathematics. Supplement I 1997Branko NikolicNo ratings yet
- C++ ExerciseDocument49 pagesC++ ExerciselsueyinNo ratings yet
- Ejercicios TL H. AntonDocument2 pagesEjercicios TL H. AntonLuis ChipiturkinNo ratings yet
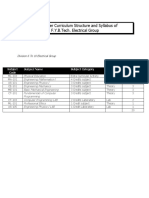
- Sem I (E Group) PDFDocument17 pagesSem I (E Group) PDFSunil GiriNo ratings yet
- Engg Maths1Document4 pagesEngg Maths1AnuNo ratings yet
- (MPS-SIAM series on optimization) James Renegar - A mathematical view of interior-point methods in convex optimization-Society for Industrial and Applied Mathematics _, Mathematical Programming Societ.pdfDocument126 pages(MPS-SIAM series on optimization) James Renegar - A mathematical view of interior-point methods in convex optimization-Society for Industrial and Applied Mathematics _, Mathematical Programming Societ.pdfChristian JúniorNo ratings yet
- Complete Maths Syllabus & Analysis Master Maths From ZERODocument46 pagesComplete Maths Syllabus & Analysis Master Maths From ZEROKankarla Jovial DaniNo ratings yet
- Screenshot 2023-06-18 at 4.35.56 PMDocument13 pagesScreenshot 2023-06-18 at 4.35.56 PMNikhil SinghNo ratings yet
- Chemical Applications of Group TheoryDocument468 pagesChemical Applications of Group TheoryBrunoRamosdeLima80% (5)
- Aircraft Flight Dynamics: at The End of The Course, You Should Be Able ToDocument25 pagesAircraft Flight Dynamics: at The End of The Course, You Should Be Able ToAndreNo ratings yet
- Controlling Your Robot With Python: 1 Preparing The EnvironmentDocument6 pagesControlling Your Robot With Python: 1 Preparing The Environmentdarfyma putraNo ratings yet
- Tachyons and Superluminal BoostsDocument14 pagesTachyons and Superluminal BoostsbehsharifiNo ratings yet
- Unbiased Estimation of A Sparse Vector in White Gaussian NoiseDocument46 pagesUnbiased Estimation of A Sparse Vector in White Gaussian NoiseMohitRajputNo ratings yet
- Time-Lapse Crosshole Seismic Tomography For Characterisation and Treatment Evaluation of The Ribeiradio Dam Rock Mass FoundationDocument9 pagesTime-Lapse Crosshole Seismic Tomography For Characterisation and Treatment Evaluation of The Ribeiradio Dam Rock Mass Foundationdwi adliNo ratings yet
- Hydro Static and Stability Calculations With MatLabDocument39 pagesHydro Static and Stability Calculations With MatLabMd Raisul IslamNo ratings yet
- Z-Bus Building Algorithm: Network Representation 1,2,3,4-Nodes Let 1 Be The Reference Node A, B, C, D, e - ElementsDocument17 pagesZ-Bus Building Algorithm: Network Representation 1,2,3,4-Nodes Let 1 Be The Reference Node A, B, C, D, e - ElementsAsrar Hussain BhatNo ratings yet
- Modul 11: Matriks: (Bam) Modul Matematik SPMDocument2 pagesModul 11: Matriks: (Bam) Modul Matematik SPMbalkisNo ratings yet
- Prediction of Tool Wear Using Regression and ANN ModelsDocument14 pagesPrediction of Tool Wear Using Regression and ANN ModelsAtsis PapadopoulosNo ratings yet
- GENIUS MAKER - What Is New in Genius Maker Software 3Document3 pagesGENIUS MAKER - What Is New in Genius Maker Software 3GoldenKstarNo ratings yet
- Syllabus of Ktu IC s3Document3 pagesSyllabus of Ktu IC s3Shanu ApNo ratings yet
- Applied Linear Algebra Solutions Errata (Olver)Document3 pagesApplied Linear Algebra Solutions Errata (Olver)Lisha50% (2)
- Principles of Precision Machine DesignDocument493 pagesPrinciples of Precision Machine DesignWisdom Patrick Enang100% (3)
- Finite Element BookDocument349 pagesFinite Element Bookanggarinaldi88% (8)
- Lecture 41Document85 pagesLecture 41SWAG BROTHERZNo ratings yet
- Algebra: LinearDocument386 pagesAlgebra: LinearMaria Jose de las mercedes Costa AzulNo ratings yet
- Matrices and Linear TransformationsDocument10 pagesMatrices and Linear TransformationsDavidNo ratings yet
- Solutions For Problems in The 9 International Mathematics Competition For University StudentsDocument4 pagesSolutions For Problems in The 9 International Mathematics Competition For University StudentsMuhammad Al KahfiNo ratings yet