Download as pdf or txt
You might also like
- Improved Crash Detection Algorithm For Vehicle Crash DetectionDocument7 pagesImproved Crash Detection Algorithm For Vehicle Crash Detection文升No ratings yet
- Amina Through My Eyes 9781743312490 TNDocument42 pagesAmina Through My Eyes 9781743312490 TNcyla pocamasNo ratings yet
- Multi-Traffic Scene Perception Based On Supervised LearningDocument26 pagesMulti-Traffic Scene Perception Based On Supervised LearningLakshmi Avadhanula78% (9)
- A Deceleration Control Method of Automobile For Collision Avoidance Based On Driver's Perceptual RiskDocument7 pagesA Deceleration Control Method of Automobile For Collision Avoidance Based On Driver's Perceptual RiskEr Chetan BachhavNo ratings yet
- Driving Event Detection and Driving Style Classification Using ArtificialDocument6 pagesDriving Event Detection and Driving Style Classification Using ArtificialJuan Pablo Hernandez ZNo ratings yet
- MAJORDocument24 pagesMAJORC RAHUL RAO.571No ratings yet
- Alert SystemDocument7 pagesAlert SystemBalasaheb Bhausaheb Jadhav -No ratings yet
- Alyahya Temporal Driver Action Localization Using Action Classification Methods CVPRW 2022 PaperDocument8 pagesAlyahya Temporal Driver Action Localization Using Action Classification Methods CVPRW 2022 PapertaghreedalhussanNo ratings yet
- High Definition Map-Based Localization Using ADASDocument11 pagesHigh Definition Map-Based Localization Using ADASravichoprascribdNo ratings yet
- Wevj 14 00032 v2Document19 pagesWevj 14 00032 v22jaiprakash6No ratings yet
- Autonomous VehiclesDocument15 pagesAutonomous VehiclesAYESHANo ratings yet
- An Advanced Approach For Road SafetyDocument2 pagesAn Advanced Approach For Road SafetyKaspa VivekNo ratings yet
- Drivingstyles: A Smartphone Application To Assess Driver BehaviorDocument6 pagesDrivingstyles: A Smartphone Application To Assess Driver BehaviorJhiovane AlexsanderNo ratings yet
- Sensors 23 00814 v4Document30 pagesSensors 23 00814 v4Adnane BaraghenNo ratings yet
- Energies 15 04625Document23 pagesEnergies 15 04625Danilo RojasNo ratings yet
- Spee Tom TerDocument16 pagesSpee Tom TerpradeepNo ratings yet
- A Hybrid Approach For Fatigue Detection and QuantificationDocument7 pagesA Hybrid Approach For Fatigue Detection and Quantificationissam issamNo ratings yet
- Journal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueDocument26 pagesJournal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueSteve LegrandNo ratings yet
- Sensors: A Smartphone-Based Driver Safety Monitoring System Using Data FusionDocument17 pagesSensors: A Smartphone-Based Driver Safety Monitoring System Using Data FusionpravinNo ratings yet
- 1st Topic Week 4Document5 pages1st Topic Week 4Zeeshan AliNo ratings yet
- A Driving Decision Strategy (DDS) Based On 2020Document3 pagesA Driving Decision Strategy (DDS) Based On 2020bannu24111No ratings yet
- Self-Driving Car Lane-Keeping Assist Using PID and Pure Pursuit ControlDocument6 pagesSelf-Driving Car Lane-Keeping Assist Using PID and Pure Pursuit ControlTiến Hoàng KimNo ratings yet
- Akademia Baru: Vehicle Speed Estimation Using Image ProcessingDocument8 pagesAkademia Baru: Vehicle Speed Estimation Using Image ProcessingAnjali KultheNo ratings yet
- Chairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperDocument9 pagesChairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperAntla SarfarazNo ratings yet
- Sensors: Vehicle Dynamic Prediction Systems With On-Line Identification of Vehicle Parameters and Road ConditionsDocument23 pagesSensors: Vehicle Dynamic Prediction Systems With On-Line Identification of Vehicle Parameters and Road ConditionsjosueNo ratings yet
- Applsci 08 02508 Vehicle SafetyDocument20 pagesApplsci 08 02508 Vehicle SafetyLuthfi Aziz LubisNo ratings yet
- Applied SciencesDocument13 pagesApplied SciencesKotteshwari KottiNo ratings yet
- Automatic Traffic Surveillance System For Vehicle Tracking and ClassificationDocument13 pagesAutomatic Traffic Surveillance System For Vehicle Tracking and ClassificationSaleem AshrafNo ratings yet
- A Novel Algorithm For Estimating Vehicle Speed From Two Consecutive ImagesDocument6 pagesA Novel Algorithm For Estimating Vehicle Speed From Two Consecutive ImagessamiNo ratings yet
- Sensors 17 01350Document18 pagesSensors 17 01350oula0723No ratings yet
- Real-Time Driver-Drowsiness Detection System Using Facial FeaturesDocument12 pagesReal-Time Driver-Drowsiness Detection System Using Facial FeaturesthefakestudentNo ratings yet
- Iet-Its 2019 0317Document9 pagesIet-Its 2019 0317Vismar OchoaNo ratings yet
- Computer Vision Techniques For Vehicular Accident Detection A Brief ReviewDocument7 pagesComputer Vision Techniques For Vehicular Accident Detection A Brief ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Driving Style Assessment Based On The GPS Data and Fuzzy Inference SystemsDocument8 pagesDriving Style Assessment Based On The GPS Data and Fuzzy Inference SystemsJuan Pablo Hernandez ZNo ratings yet
- Robust Inter-Vehicle Distance Estimation Method Based On Monocular VisionDocument12 pagesRobust Inter-Vehicle Distance Estimation Method Based On Monocular Visionnirajaadithya.dasireddiNo ratings yet
- Research PaperDocument6 pagesResearch Paperhritwik.20scse1180049No ratings yet
- Sensors 19 03059Document28 pagesSensors 19 03059Sachin KumarNo ratings yet
- Dms DriveagxDocument6 pagesDms DriveagxadarshsasidharanNo ratings yet
- Car Following Logic (Wiedemann 1974)Document22 pagesCar Following Logic (Wiedemann 1974)pritshNo ratings yet
- Sensors 19 04108 PDFDocument23 pagesSensors 19 04108 PDFbmbmbmNo ratings yet
- DQN-based Reinforcement Learning For Vehicle Control of Autonomous Vehicles Interacting With PedestriansDocument6 pagesDQN-based Reinforcement Learning For Vehicle Control of Autonomous Vehicles Interacting With PedestriansVinh Lê HữuNo ratings yet
- Autonomous Driving System Using Proximal Policy Optimization in Deep Reinforcement LearningDocument10 pagesAutonomous Driving System Using Proximal Policy Optimization in Deep Reinforcement LearningIAES IJAINo ratings yet
- Driver Behavior Classification at Intersections and Validation On Large Naturalistic Data SetDocument13 pagesDriver Behavior Classification at Intersections and Validation On Large Naturalistic Data SetJim C. ValenciaNo ratings yet
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDocument21 pagesTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNo ratings yet
- Research PaperDocument21 pagesResearch Paperdivyashree jadejaNo ratings yet
- Pretrained Vehicle ClassifierDocument11 pagesPretrained Vehicle ClassifierSuvramalya BasakNo ratings yet
- Enhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. StoltzDocument17 pagesEnhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. Stoltzjhonatan1.rmvNo ratings yet
- 1 s2.0 S2666546821000641 MainDocument9 pages1 s2.0 S2666546821000641 MainSidharth MaheshNo ratings yet
- Research Paper On Adaptive Cruise ControlDocument4 pagesResearch Paper On Adaptive Cruise Controlmqolulbkf100% (1)
- Ref 4Document9 pagesRef 4sagar patoleNo ratings yet
- Model-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceDocument14 pagesModel-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceIAES International Journal of Robotics and AutomationNo ratings yet
- Detecting Driver Sleepiness Using Consumer Wearable Devices in Manual and Partial Automated Real-Road DrivingDocument10 pagesDetecting Driver Sleepiness Using Consumer Wearable Devices in Manual and Partial Automated Real-Road DrivingPrashanth HCNo ratings yet
- Comparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleDocument9 pagesComparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleAnonymous ZC1ld1CLmNo ratings yet
- Enhancing Road SafetyDocument11 pagesEnhancing Road Safetykpsitmail007No ratings yet
- Blind-Spot Vehicle Detection Using Motion and Static FeatureDocument6 pagesBlind-Spot Vehicle Detection Using Motion and Static FeatureDivine Grace BurmalNo ratings yet
- Lane Detection in Autonomous Vehicles A Systematic ReviewDocument37 pagesLane Detection in Autonomous Vehicles A Systematic Reviewnirajaadithya.dasireddiNo ratings yet
- Accident PreventDocument7 pagesAccident PreventshreepadamrNo ratings yet
- Energy Consumption Estimation in Electric Vehicles Considering Driving StyleDocument6 pagesEnergy Consumption Estimation in Electric Vehicles Considering Driving StyleJuan Pablo Hernandez ZNo ratings yet
- 2013 IEEE T ITS Real-TimeRoad-SlopeEstimationBasedonIntegrationofOnboardSensorsWithGPSUsinganIMMPDAFilterDocument16 pages2013 IEEE T ITS Real-TimeRoad-SlopeEstimationBasedonIntegrationofOnboardSensorsWithGPSUsinganIMMPDAFilterLikitha SbNo ratings yet
- Special Issue: Advances in Computational Electromagnetics: MagnetochemistryDocument2 pagesSpecial Issue: Advances in Computational Electromagnetics: MagnetochemistryJose Leonardo Simancas GarciaNo ratings yet
- Mmce 20097Document8 pagesMmce 20097Jose Leonardo Simancas GarciaNo ratings yet
- Cancellation of Sub-Harmonic and Second Harmonic Components To Improve The Linearity of A Low-Power Consumption Lna Using Sige HBTDocument4 pagesCancellation of Sub-Harmonic and Second Harmonic Components To Improve The Linearity of A Low-Power Consumption Lna Using Sige HBTJose Leonardo Simancas GarciaNo ratings yet
- Multiple Random VariablesDocument33 pagesMultiple Random VariablesJose Leonardo Simancas GarciaNo ratings yet
- Mmce 20181Document8 pagesMmce 20181Jose Leonardo Simancas GarciaNo ratings yet
- Am-Pm Conversion Introduced by Mesfet and HBT: H. Jardo N-Aguilar and J. Aguilar-TorrenteraDocument3 pagesAm-Pm Conversion Introduced by Mesfet and HBT: H. Jardo N-Aguilar and J. Aguilar-TorrenteraJose Leonardo Simancas GarciaNo ratings yet
- Demystifying Pole-Zero Doublets - EDNDocument12 pagesDemystifying Pole-Zero Doublets - EDNJose Leonardo Simancas GarciaNo ratings yet
- Parameter EstimationDocument34 pagesParameter EstimationJose Leonardo Simancas GarciaNo ratings yet
- Discrete Random VariablesDocument28 pagesDiscrete Random VariablesJose Leonardo Simancas GarciaNo ratings yet
- D R U I DDocument80 pagesD R U I DJose Leonardo Simancas GarciaNo ratings yet
- Multi-Pump Control Applications For ABB ACQ 810 Industrial DriveDocument8 pagesMulti-Pump Control Applications For ABB ACQ 810 Industrial DriveJose Leonardo Simancas GarciaNo ratings yet
- Continuous Random VariablesDocument39 pagesContinuous Random VariablesJose Leonardo Simancas GarciaNo ratings yet
- Beyond The Global Factory' Model: Innovative Capabilities For Upgrading China's IT IndustryDocument23 pagesBeyond The Global Factory' Model: Innovative Capabilities For Upgrading China's IT IndustryJose Leonardo Simancas GarciaNo ratings yet
- Arduino Debugger: Jan Dolinay, Petr Dostálek, and Vladimír VašekDocument4 pagesArduino Debugger: Jan Dolinay, Petr Dostálek, and Vladimír VašekJose Leonardo Simancas GarciaNo ratings yet
- Working Paper Series: Jarle Hildrum, Dieter Ernst and Jan FagerbergDocument33 pagesWorking Paper Series: Jarle Hildrum, Dieter Ernst and Jan FagerbergJose Leonardo Simancas GarciaNo ratings yet
- DoktorarbeitDocument164 pagesDoktorarbeitJose Leonardo Simancas GarciaNo ratings yet
- Coordination of Operations by Relation Extraction For Manufacturing Cell ControllersDocument16 pagesCoordination of Operations by Relation Extraction For Manufacturing Cell ControllersJose Leonardo Simancas GarciaNo ratings yet
- Abbasov Monograph HydroacOceanExpl Scriv-Wiley 2016 PDFDocument40 pagesAbbasov Monograph HydroacOceanExpl Scriv-Wiley 2016 PDFJose Leonardo Simancas GarciaNo ratings yet
- Design and Construction of Arduino-Hacked Variable Gating Distortion PedalDocument9 pagesDesign and Construction of Arduino-Hacked Variable Gating Distortion PedalJose Leonardo Simancas GarciaNo ratings yet
- Complexity and Internationalisation of Innovation - Why Is Chip Design Moving To Asia? by Dieter Ernst East West Center, Honolulu, Hawaii, USADocument24 pagesComplexity and Internationalisation of Innovation - Why Is Chip Design Moving To Asia? by Dieter Ernst East West Center, Honolulu, Hawaii, USAJose Leonardo Simancas GarciaNo ratings yet
- Development and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveDocument10 pagesDevelopment and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveJose Leonardo Simancas GarciaNo ratings yet
- Lesson 1: Access Methods: Ing. José Leonardo Simancas García, MGDocument11 pagesLesson 1: Access Methods: Ing. José Leonardo Simancas García, MGJose Leonardo Simancas GarciaNo ratings yet
- Lesson 5: Network Operating Systems in Multivendor EnvironmentsDocument7 pagesLesson 5: Network Operating Systems in Multivendor EnvironmentsJose Leonardo Simancas GarciaNo ratings yet
- Lesson 1: Connectivity Devices: Ing. José L. Simancas García, MGDocument35 pagesLesson 1: Connectivity Devices: Ing. José L. Simancas García, MGJose Leonardo Simancas GarciaNo ratings yet
- Lesson 1: Introduction To Network Operating Systems: Ing. José Leonardo Simancas García, MGDocument15 pagesLesson 1: Introduction To Network Operating Systems: Ing. José Leonardo Simancas García, MGJose Leonardo Simancas GarciaNo ratings yet
- Presentacion 15Document30 pagesPresentacion 15Jose Leonardo Simancas GarciaNo ratings yet
- Cooperative Development of An Arduino-Compatible Building Automation System For The Practical Teaching of ElectronicsDocument7 pagesCooperative Development of An Arduino-Compatible Building Automation System For The Practical Teaching of ElectronicsJose Leonardo Simancas GarciaNo ratings yet
- Broadband Waveform Geoacoustic Inversions With Absolute Travel TimeDocument15 pagesBroadband Waveform Geoacoustic Inversions With Absolute Travel TimeJose Leonardo Simancas GarciaNo ratings yet
- Estimates of Low-Frequency Sound Speed and Attenuation in A Surface Mud Layer Using Low-Order ModesDocument11 pagesEstimates of Low-Frequency Sound Speed and Attenuation in A Surface Mud Layer Using Low-Order ModesJose Leonardo Simancas GarciaNo ratings yet
- Geoacoustic Inversion Using An Autonomous Underwater Vehicle in Conjunction With Distributed SensorsDocument23 pagesGeoacoustic Inversion Using An Autonomous Underwater Vehicle in Conjunction With Distributed SensorsJose Leonardo Simancas GarciaNo ratings yet
- MAED - Management and Supervision of InstructionDocument11 pagesMAED - Management and Supervision of InstructionDenis CadotdotNo ratings yet
- HSMC 601 Lecture 3 Technical CommunicationDocument15 pagesHSMC 601 Lecture 3 Technical CommunicationNitish BhardwajNo ratings yet
- Parent Newsletter 1Document3 pagesParent Newsletter 1api-636119769No ratings yet
- Solved The 5-m High Retaining Wall in Figure 13.40c Is Subject...Document1 pageSolved The 5-m High Retaining Wall in Figure 13.40c Is Subject...Cristian A. GarridoNo ratings yet
- Define Family EssayDocument4 pagesDefine Family Essayapi-341176984No ratings yet
- Free Registration Skim Untuk PelajarDocument2 pagesFree Registration Skim Untuk PelajarChok Wei Haw ChokNo ratings yet
- 10.2 Lesson On How To Write A Good SpeechDocument5 pages10.2 Lesson On How To Write A Good SpeechNafis Al ZameeNo ratings yet
- What Do The I Dots RevealDocument3 pagesWhat Do The I Dots RevealAshok TumuluriNo ratings yet
- Prelimina RDocument28 pagesPrelimina Rsesirekha@gmail.comNo ratings yet
- A Midsummer Nights Dream by William Shakespeare Teacher Resource18Document27 pagesA Midsummer Nights Dream by William Shakespeare Teacher Resource18Sher Elliott100% (1)
- Ccs Form 3 Approval For Final DefenseDocument2 pagesCcs Form 3 Approval For Final DefenseMOHAMMAD FAHEEM AZISNo ratings yet
- FRGP 472100BDocument3 pagesFRGP 472100B0555668118100% (1)
- Cambridge English Preliminary Fs Sample 5 Speaking Part 2 Candidate Booklet v2Document4 pagesCambridge English Preliminary Fs Sample 5 Speaking Part 2 Candidate Booklet v2teodor0220100% (1)
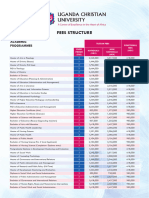
- Fees StructureDocument3 pagesFees Structurehealed928No ratings yet
- Altez-Albela - Filipina in Noli Me TangereDocument16 pagesAltez-Albela - Filipina in Noli Me TangereColeen PintorNo ratings yet
- Pediatric Nurse Practitioner or Family Nurse PractitionerDocument3 pagesPediatric Nurse Practitioner or Family Nurse Practitionerapi-77949523No ratings yet
- Unit 1 Friends AbroadDocument2 pagesUnit 1 Friends AbroadZulfadli ZulfadliNo ratings yet
- Chapter 5. Module 6 Learning ActivityDocument1 pageChapter 5. Module 6 Learning Activityjoyce dawongNo ratings yet
- Revised AB Calendar 2017-2018Document2 pagesRevised AB Calendar 2017-2018Ivan MarreroNo ratings yet
- Documentation Training WorkshopDocument22 pagesDocumentation Training WorkshopMahara Nor100% (1)
- Around The World On The Number 7 TrainDocument2 pagesAround The World On The Number 7 TrainMahammad AliNo ratings yet
- UntitledDocument23 pagesUntitledoutdash2No ratings yet
- Mapeh Module 1 Grade 12 Answer KeysDocument4 pagesMapeh Module 1 Grade 12 Answer KeysKaru GreyNo ratings yet
- Final Project Chapter 3 HassanDocument6 pagesFinal Project Chapter 3 HassanHassan QadarNo ratings yet
- Writing A Successful Thesis or DissertationDocument6 pagesWriting A Successful Thesis or DissertationWriteMyPaperUK100% (1)
- Life Skill Development Solved MCQs (Set-2)Document8 pagesLife Skill Development Solved MCQs (Set-2)funny world100% (3)
- Simulations and The Games in EducationDocument2 pagesSimulations and The Games in Educationapi-470836285No ratings yet
- EDCOM II Year One ReportDocument398 pagesEDCOM II Year One ReportĢèñŕe Èrèsmas FèľiçèsNo ratings yet
- Assignment 1 Dka4cDocument2 pagesAssignment 1 Dka4cDharveen Raj SaravananNo ratings yet