
Lab23 PDF
Lab23 PDF
You might also like
- PWM DC Motor Speed Control Using 555Document16 pagesPWM DC Motor Speed Control Using 555Karthik Dm67% (3)
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Interfacing Stepper Motor To 8086 Using 8255Document6 pagesInterfacing Stepper Motor To 8086 Using 8255berhe2121100% (1)
- Unit8-RK 3Document27 pagesUnit8-RK 3sbaNo ratings yet
- Electrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesDocument27 pagesElectrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesUtkarsh Krishn SG21547No ratings yet
- Fig. 12.1 - Movement of Rotor For Current in Different WindingsDocument6 pagesFig. 12.1 - Movement of Rotor For Current in Different WindingsBala SubramanianNo ratings yet
- Microcontroller and EmbeddedDocument70 pagesMicrocontroller and Embeddedvarun palNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorMohamed Irshad AboubackerNo ratings yet
- Stepper MotorDocument15 pagesStepper MotorsharadaNo ratings yet
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- (212142518) Stepper Motor Control Using MicrocontrollerDocument4 pages(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiNo ratings yet
- Interfacing of 8051: Unit 4Document44 pagesInterfacing of 8051: Unit 4radhika patelNo ratings yet
- KKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorDocument7 pagesKKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorPRASAATH A/L BALAKRISHNANNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- Interfacing Stepper Motor Using MicroControllerDocument4 pagesInterfacing Stepper Motor Using MicroControllershahzad jalbani100% (1)
- Experiment 6 DC Motor Learning Objectives:: SourceDocument5 pagesExperiment 6 DC Motor Learning Objectives:: SourceDefinitelyNotCyNo ratings yet
- Lab 7 Interfacing A Stepper Motor To The 8051Document3 pagesLab 7 Interfacing A Stepper Motor To The 8051Aravind PaulchamyNo ratings yet
- Microprocessor and Microcontroller Lab: Experiments PerformedDocument51 pagesMicroprocessor and Microcontroller Lab: Experiments PerformedadityaNo ratings yet
- Adcanddac 210216095501Document24 pagesAdcanddac 210216095501Kiran GNo ratings yet
- 8051 Microcontroller Module 5 NotesDocument27 pages8051 Microcontroller Module 5 Notesrakesh rakiNo ratings yet
- Interfacing Stepper Motor To 8051Document5 pagesInterfacing Stepper Motor To 8051Prospect Teaches MathematicsNo ratings yet
- Experiment - 9 - Stepper MotorDocument5 pagesExperiment - 9 - Stepper MotorABHISHEK SHARMANo ratings yet
- PLC Stepper Motor ControllerDocument12 pagesPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- Stepper Motor: Free !Document2 pagesStepper Motor: Free !carlos augusto do carmo braia100% (1)
- New FMA Unit 6 NotesDocument16 pagesNew FMA Unit 6 NotesOmkar ChedeNo ratings yet
- LAB 15 Interfacing A Stepper Motor To The 8051Document3 pagesLAB 15 Interfacing A Stepper Motor To The 8051M Rameez Ur RehmanNo ratings yet
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Stepper Motor With 8051 Microcontroller.: By: Prof. Amit N KshirsagarDocument12 pagesStepper Motor With 8051 Microcontroller.: By: Prof. Amit N KshirsagarAmit KshirsagarNo ratings yet
- 8086 InterfacingDocument6 pages8086 Interfacingapi-19951707100% (1)
- Machine DesignDocument9 pagesMachine DesignAmit DipankarNo ratings yet
- Stepper Motor InterfacingDocument4 pagesStepper Motor InterfacingPiyush chaudhariNo ratings yet
- Stepper MotorDocument3 pagesStepper Motormpkkbtech100% (1)
- BASIC Stamp I Application Notes: 6: A Serial Stepper ControllerDocument4 pagesBASIC Stamp I Application Notes: 6: A Serial Stepper ControllerNguyễn HiểnNo ratings yet
- Stepper Motor Control Using The PIC16F684Document12 pagesStepper Motor Control Using The PIC16F684edward_conzaNo ratings yet
- Unit 5Document30 pagesUnit 5kruthikaNo ratings yet
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- Controlling Stepper Motor: Experiment #4Document9 pagesControlling Stepper Motor: Experiment #4Asaad HalayqaNo ratings yet
- DC Motor Control Using 8085Document48 pagesDC Motor Control Using 8085Bhavya Wadhwa100% (3)
- Start-Up Control Algorithm For Sensorless and Variable Load BLDC Control Using Variable Inductance Sensing MethodDocument16 pagesStart-Up Control Algorithm For Sensorless and Variable Load BLDC Control Using Variable Inductance Sensing MethodGautam MonipatroNo ratings yet
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADocument9 pagesI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SNo ratings yet
- Controlling Stepper Motor Using 8051 MicrocontrollerDocument14 pagesControlling Stepper Motor Using 8051 MicrocontrollerAnkush AgarwalNo ratings yet
- Controlling Stepper Motors With A PIC MicrocontrollerDocument16 pagesControlling Stepper Motors With A PIC Microcontrollervasudeva yasasNo ratings yet
- Ch6 - A Stepper MotorDocument5 pagesCh6 - A Stepper MotorEdward Conal100% (2)
- A Microprocessor Based Black and White Image ScannerDocument13 pagesA Microprocessor Based Black and White Image ScannerPraveen Kumar SinghNo ratings yet
- .Archlab Task 12 (Control Stepper Motor Direction)Document4 pages.Archlab Task 12 (Control Stepper Motor Direction)W.S EntertainmentNo ratings yet
- Ex - No.1 Interfacing Stepper Motor - Using 8085Document4 pagesEx - No.1 Interfacing Stepper Motor - Using 8085balandineshNo ratings yet
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- MPMC AnswersDocument10 pagesMPMC AnswersMuralicheenuNo ratings yet
- Stepper Cont Driver Bip 2.8A L6208 ApN MicrostepDocument20 pagesStepper Cont Driver Bip 2.8A L6208 ApN Microstep0400800No ratings yet
- STEPPER MOTOR CONTROL USING INFERA REDMinor ProjectDocument22 pagesSTEPPER MOTOR CONTROL USING INFERA REDMinor ProjectJet's100% (2)
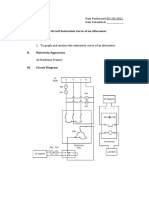
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- DC MotorDocument8 pagesDC MotordhineshpNo ratings yet
- Circuit Drawing of Stepper Motor ControllerDocument24 pagesCircuit Drawing of Stepper Motor Controlleranon-814167100% (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Genika HletronikaDocument103 pagesGenika HletronikaKonstantinos YiannakidisNo ratings yet
- Ex.2 - Ecad 1Document6 pagesEx.2 - Ecad 1Saturn MoonNo ratings yet
- Model APS-20B: Installation ManualDocument8 pagesModel APS-20B: Installation Manualivart0No ratings yet
- Assign - CompDocument9 pagesAssign - CompJenifer Aratan DiocosNo ratings yet
- Data Sheet FC-3284Document4 pagesData Sheet FC-3284sshaffer_9100% (1)
- Conductance Moisture GaugeDocument13 pagesConductance Moisture Gaugeyerazig 2k19No ratings yet
- Wisconsin DFX-Root Cause Failure Analysis FinalDocument62 pagesWisconsin DFX-Root Cause Failure Analysis Finalb0i13r100% (1)
- Tektronix 475 Option4 Scope Maintenance ManualDocument217 pagesTektronix 475 Option4 Scope Maintenance ManualkirkweaverNo ratings yet
- uPI Confidential: 3A Ultra Low Dropout Linear RegulatorDocument13 pagesuPI Confidential: 3A Ultra Low Dropout Linear RegulatorLEONNo ratings yet
- Optosection PDFDocument117 pagesOptosection PDFeuqehtbNo ratings yet
- Led Drivr Tipos PhilipsDocument17 pagesLed Drivr Tipos PhilipsAndres TobonNo ratings yet
- DOMINATOR® Platinum: Corsair / Acbel / Deck - Dealer Price List 08-JANUARY-2015 Ver 1.0 SRP XMS4 - Quad Channel DDR4Document7 pagesDOMINATOR® Platinum: Corsair / Acbel / Deck - Dealer Price List 08-JANUARY-2015 Ver 1.0 SRP XMS4 - Quad Channel DDR4ElmiExtremodNo ratings yet
- PVD CVD WNP PDFDocument71 pagesPVD CVD WNP PDFApresiasi teknik 2018No ratings yet
- Circuit Breacker 1Document156 pagesCircuit Breacker 1Paulo Cesar100% (1)
- GC9401 Application Notes Ver1Document18 pagesGC9401 Application Notes Ver1SpecShareNo ratings yet
- All in One PDFDocument85 pagesAll in One PDFklasio artNo ratings yet
- HVAC CurriculumDocument14 pagesHVAC CurriculumWill PerrymanNo ratings yet
- Opto - Electronic Vts Final 2-1-1Document15 pagesOpto - Electronic Vts Final 2-1-1Vincent GamliNo ratings yet
- Electronic Instrumentation: Experiment 8: DiodesDocument55 pagesElectronic Instrumentation: Experiment 8: DiodesCharie MaeNo ratings yet
- Central: CXT2907A Surface Mount PNP Silicon Transistor DescriptionDocument2 pagesCentral: CXT2907A Surface Mount PNP Silicon Transistor DescriptionJuan HernándezNo ratings yet
- Acopian Cat Low Prof SW WL7 WL9Document7 pagesAcopian Cat Low Prof SW WL7 WL9krrijoNo ratings yet
- CHAPTER 4-Noise Analysis and DB CalculationDocument20 pagesCHAPTER 4-Noise Analysis and DB CalculationDanielle Tio100% (1)
- Magnetic Properties & CharacteristicsDocument9 pagesMagnetic Properties & CharacteristicsRogelyn JosolNo ratings yet
- TVS Diodes Data SheetsDocument212 pagesTVS Diodes Data SheetsBenjamin Dover100% (1)
- 11ea9014cd CDocument9 pages11ea9014cd CJason ColonNo ratings yet
- Safety Aspects in Substation Voltage UpratingDocument6 pagesSafety Aspects in Substation Voltage UpratingPablo MavaresNo ratings yet
- Lossna-Board: Heat-Resistant Material SeriesDocument14 pagesLossna-Board: Heat-Resistant Material SeriesLord VarioNo ratings yet
- tr7930-7950 ManualDocument24 pagestr7930-7950 ManualJorge Eduardo Iriart BidartNo ratings yet




















































































Download as pdf or txt
You might also like
- PWM DC Motor Speed Control Using 555Document16 pagesPWM DC Motor Speed Control Using 555Karthik Dm67% (3)
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Interfacing Stepper Motor To 8086 Using 8255Document6 pagesInterfacing Stepper Motor To 8086 Using 8255berhe2121100% (1)
- Unit8-RK 3Document27 pagesUnit8-RK 3sbaNo ratings yet
- Electrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesDocument27 pagesElectrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesUtkarsh Krishn SG21547No ratings yet
- Fig. 12.1 - Movement of Rotor For Current in Different WindingsDocument6 pagesFig. 12.1 - Movement of Rotor For Current in Different WindingsBala SubramanianNo ratings yet
- Microcontroller and EmbeddedDocument70 pagesMicrocontroller and Embeddedvarun palNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorMohamed Irshad AboubackerNo ratings yet
- Stepper MotorDocument15 pagesStepper MotorsharadaNo ratings yet
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- (212142518) Stepper Motor Control Using MicrocontrollerDocument4 pages(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiNo ratings yet
- Interfacing of 8051: Unit 4Document44 pagesInterfacing of 8051: Unit 4radhika patelNo ratings yet
- KKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorDocument7 pagesKKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorPRASAATH A/L BALAKRISHNANNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- Interfacing Stepper Motor Using MicroControllerDocument4 pagesInterfacing Stepper Motor Using MicroControllershahzad jalbani100% (1)
- Experiment 6 DC Motor Learning Objectives:: SourceDocument5 pagesExperiment 6 DC Motor Learning Objectives:: SourceDefinitelyNotCyNo ratings yet
- Lab 7 Interfacing A Stepper Motor To The 8051Document3 pagesLab 7 Interfacing A Stepper Motor To The 8051Aravind PaulchamyNo ratings yet
- Microprocessor and Microcontroller Lab: Experiments PerformedDocument51 pagesMicroprocessor and Microcontroller Lab: Experiments PerformedadityaNo ratings yet
- Adcanddac 210216095501Document24 pagesAdcanddac 210216095501Kiran GNo ratings yet
- 8051 Microcontroller Module 5 NotesDocument27 pages8051 Microcontroller Module 5 Notesrakesh rakiNo ratings yet
- Interfacing Stepper Motor To 8051Document5 pagesInterfacing Stepper Motor To 8051Prospect Teaches MathematicsNo ratings yet
- Experiment - 9 - Stepper MotorDocument5 pagesExperiment - 9 - Stepper MotorABHISHEK SHARMANo ratings yet
- PLC Stepper Motor ControllerDocument12 pagesPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- Stepper Motor: Free !Document2 pagesStepper Motor: Free !carlos augusto do carmo braia100% (1)
- New FMA Unit 6 NotesDocument16 pagesNew FMA Unit 6 NotesOmkar ChedeNo ratings yet
- LAB 15 Interfacing A Stepper Motor To The 8051Document3 pagesLAB 15 Interfacing A Stepper Motor To The 8051M Rameez Ur RehmanNo ratings yet
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Stepper Motor With 8051 Microcontroller.: By: Prof. Amit N KshirsagarDocument12 pagesStepper Motor With 8051 Microcontroller.: By: Prof. Amit N KshirsagarAmit KshirsagarNo ratings yet
- 8086 InterfacingDocument6 pages8086 Interfacingapi-19951707100% (1)
- Machine DesignDocument9 pagesMachine DesignAmit DipankarNo ratings yet
- Stepper Motor InterfacingDocument4 pagesStepper Motor InterfacingPiyush chaudhariNo ratings yet
- Stepper MotorDocument3 pagesStepper Motormpkkbtech100% (1)
- BASIC Stamp I Application Notes: 6: A Serial Stepper ControllerDocument4 pagesBASIC Stamp I Application Notes: 6: A Serial Stepper ControllerNguyễn HiểnNo ratings yet
- Stepper Motor Control Using The PIC16F684Document12 pagesStepper Motor Control Using The PIC16F684edward_conzaNo ratings yet
- Unit 5Document30 pagesUnit 5kruthikaNo ratings yet
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- Controlling Stepper Motor: Experiment #4Document9 pagesControlling Stepper Motor: Experiment #4Asaad HalayqaNo ratings yet
- DC Motor Control Using 8085Document48 pagesDC Motor Control Using 8085Bhavya Wadhwa100% (3)
- Start-Up Control Algorithm For Sensorless and Variable Load BLDC Control Using Variable Inductance Sensing MethodDocument16 pagesStart-Up Control Algorithm For Sensorless and Variable Load BLDC Control Using Variable Inductance Sensing MethodGautam MonipatroNo ratings yet
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADocument9 pagesI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SNo ratings yet
- Controlling Stepper Motor Using 8051 MicrocontrollerDocument14 pagesControlling Stepper Motor Using 8051 MicrocontrollerAnkush AgarwalNo ratings yet
- Controlling Stepper Motors With A PIC MicrocontrollerDocument16 pagesControlling Stepper Motors With A PIC Microcontrollervasudeva yasasNo ratings yet
- Ch6 - A Stepper MotorDocument5 pagesCh6 - A Stepper MotorEdward Conal100% (2)
- A Microprocessor Based Black and White Image ScannerDocument13 pagesA Microprocessor Based Black and White Image ScannerPraveen Kumar SinghNo ratings yet
- .Archlab Task 12 (Control Stepper Motor Direction)Document4 pages.Archlab Task 12 (Control Stepper Motor Direction)W.S EntertainmentNo ratings yet
- Ex - No.1 Interfacing Stepper Motor - Using 8085Document4 pagesEx - No.1 Interfacing Stepper Motor - Using 8085balandineshNo ratings yet
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- MPMC AnswersDocument10 pagesMPMC AnswersMuralicheenuNo ratings yet
- Stepper Cont Driver Bip 2.8A L6208 ApN MicrostepDocument20 pagesStepper Cont Driver Bip 2.8A L6208 ApN Microstep0400800No ratings yet
- STEPPER MOTOR CONTROL USING INFERA REDMinor ProjectDocument22 pagesSTEPPER MOTOR CONTROL USING INFERA REDMinor ProjectJet's100% (2)
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- DC MotorDocument8 pagesDC MotordhineshpNo ratings yet
- Circuit Drawing of Stepper Motor ControllerDocument24 pagesCircuit Drawing of Stepper Motor Controlleranon-814167100% (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Genika HletronikaDocument103 pagesGenika HletronikaKonstantinos YiannakidisNo ratings yet
- Ex.2 - Ecad 1Document6 pagesEx.2 - Ecad 1Saturn MoonNo ratings yet
- Model APS-20B: Installation ManualDocument8 pagesModel APS-20B: Installation Manualivart0No ratings yet
- Assign - CompDocument9 pagesAssign - CompJenifer Aratan DiocosNo ratings yet
- Data Sheet FC-3284Document4 pagesData Sheet FC-3284sshaffer_9100% (1)
- Conductance Moisture GaugeDocument13 pagesConductance Moisture Gaugeyerazig 2k19No ratings yet
- Wisconsin DFX-Root Cause Failure Analysis FinalDocument62 pagesWisconsin DFX-Root Cause Failure Analysis Finalb0i13r100% (1)
- Tektronix 475 Option4 Scope Maintenance ManualDocument217 pagesTektronix 475 Option4 Scope Maintenance ManualkirkweaverNo ratings yet
- uPI Confidential: 3A Ultra Low Dropout Linear RegulatorDocument13 pagesuPI Confidential: 3A Ultra Low Dropout Linear RegulatorLEONNo ratings yet
- Optosection PDFDocument117 pagesOptosection PDFeuqehtbNo ratings yet
- Led Drivr Tipos PhilipsDocument17 pagesLed Drivr Tipos PhilipsAndres TobonNo ratings yet
- DOMINATOR® Platinum: Corsair / Acbel / Deck - Dealer Price List 08-JANUARY-2015 Ver 1.0 SRP XMS4 - Quad Channel DDR4Document7 pagesDOMINATOR® Platinum: Corsair / Acbel / Deck - Dealer Price List 08-JANUARY-2015 Ver 1.0 SRP XMS4 - Quad Channel DDR4ElmiExtremodNo ratings yet
- PVD CVD WNP PDFDocument71 pagesPVD CVD WNP PDFApresiasi teknik 2018No ratings yet
- Circuit Breacker 1Document156 pagesCircuit Breacker 1Paulo Cesar100% (1)
- GC9401 Application Notes Ver1Document18 pagesGC9401 Application Notes Ver1SpecShareNo ratings yet
- All in One PDFDocument85 pagesAll in One PDFklasio artNo ratings yet
- HVAC CurriculumDocument14 pagesHVAC CurriculumWill PerrymanNo ratings yet
- Opto - Electronic Vts Final 2-1-1Document15 pagesOpto - Electronic Vts Final 2-1-1Vincent GamliNo ratings yet
- Electronic Instrumentation: Experiment 8: DiodesDocument55 pagesElectronic Instrumentation: Experiment 8: DiodesCharie MaeNo ratings yet
- Central: CXT2907A Surface Mount PNP Silicon Transistor DescriptionDocument2 pagesCentral: CXT2907A Surface Mount PNP Silicon Transistor DescriptionJuan HernándezNo ratings yet
- Acopian Cat Low Prof SW WL7 WL9Document7 pagesAcopian Cat Low Prof SW WL7 WL9krrijoNo ratings yet
- CHAPTER 4-Noise Analysis and DB CalculationDocument20 pagesCHAPTER 4-Noise Analysis and DB CalculationDanielle Tio100% (1)
- Magnetic Properties & CharacteristicsDocument9 pagesMagnetic Properties & CharacteristicsRogelyn JosolNo ratings yet
- TVS Diodes Data SheetsDocument212 pagesTVS Diodes Data SheetsBenjamin Dover100% (1)
- 11ea9014cd CDocument9 pages11ea9014cd CJason ColonNo ratings yet
- Safety Aspects in Substation Voltage UpratingDocument6 pagesSafety Aspects in Substation Voltage UpratingPablo MavaresNo ratings yet
- Lossna-Board: Heat-Resistant Material SeriesDocument14 pagesLossna-Board: Heat-Resistant Material SeriesLord VarioNo ratings yet
- tr7930-7950 ManualDocument24 pagestr7930-7950 ManualJorge Eduardo Iriart BidartNo ratings yet