Download as pdf or txt
You might also like
- My Pals Are Here Maths Workbook 1B (DR Fong Ho Kheong, Chelvi Ramakrishnan Etc.)Document211 pagesMy Pals Are Here Maths Workbook 1B (DR Fong Ho Kheong, Chelvi Ramakrishnan Etc.)Debbie AngNo ratings yet
- Regenerative Eddy Current Embedded Conventional Braking SystemDocument5 pagesRegenerative Eddy Current Embedded Conventional Braking SystemTech MitNo ratings yet
- Mini Review On Eddy Current Brakes ParameterDocument11 pagesMini Review On Eddy Current Brakes ParameterwetopiaNo ratings yet
- Volume 3 Issue 2Document7 pagesVolume 3 Issue 2Nandakishore SNo ratings yet
- A New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsDocument9 pagesA New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsALFREDO MINDIOLANo ratings yet
- Literature Review of Eddy Current BrakesDocument4 pagesLiterature Review of Eddy Current Brakesea6xrjc4100% (1)
- The Missing Mechanical Circuit Element: FeatureDocument17 pagesThe Missing Mechanical Circuit Element: Featureนิติพล ไชยวงศ์No ratings yet
- Design Optimization of A Solenoid-Based Electromagnetic Soft Actuator With Permanent Magnet CoreDocument5 pagesDesign Optimization of A Solenoid-Based Electromagnetic Soft Actuator With Permanent Magnet CoreVinit MhatreNo ratings yet
- Eddy Current Braking Experiment Using Brake Disc From Aluminium Series of A16061 and A17075Document8 pagesEddy Current Braking Experiment Using Brake Disc From Aluminium Series of A16061 and A17075Tech MitNo ratings yet
- Flux-Canceling Electrodynamic Maglev Suspension: Part I Test Fixture Design and ModelingDocument8 pagesFlux-Canceling Electrodynamic Maglev Suspension: Part I Test Fixture Design and ModelingmarkrichardmuradNo ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- Journal of Microwaves, Optoelectronics and Electromagnetic ApplicationsDocument9 pagesJournal of Microwaves, Optoelectronics and Electromagnetic ApplicationsdoğancanNo ratings yet
- The Missing Mechanical Circuit ElementDocument17 pagesThe Missing Mechanical Circuit ElementlalallosNo ratings yet
- Eddy Current Magnetic Brake-2011Document19 pagesEddy Current Magnetic Brake-2011Awais MalikNo ratings yet
- Analysis and Design Optimization of An Improved AxDocument9 pagesAnalysis and Design Optimization of An Improved AxSubrat DasNo ratings yet
- Project Report HBSDocument16 pagesProject Report HBSMayank DeshpandeNo ratings yet
- A Research Survey of Induction Motor Operation WithDocument14 pagesA Research Survey of Induction Motor Operation WithIoan ŢileaNo ratings yet
- MATLAB in Model-Base Design For Slip Energy Recovery of Induction MotorDocument6 pagesMATLAB in Model-Base Design For Slip Energy Recovery of Induction Motorsanjay kumar yadavNo ratings yet
- Electrical Power and Energy Systems: Mateo Bašic, Dinko Vukadinovic, Goran PetrovicDocument14 pagesElectrical Power and Energy Systems: Mateo Bašic, Dinko Vukadinovic, Goran PetrovicYoussef MajdoubNo ratings yet
- Aux Bias WindingDocument10 pagesAux Bias WindingxandreayNo ratings yet
- Modeling and Control of Electromagnetic Brakes For Enhanced BrakiDocument7 pagesModeling and Control of Electromagnetic Brakes For Enhanced Brakijayaprakash2eswarnNo ratings yet
- Assignment 03 RMDocument7 pagesAssignment 03 RMijazNo ratings yet
- The Missing Mechanical Circuit ElementDocument17 pagesThe Missing Mechanical Circuit ElementgarystevensozNo ratings yet
- Ijaiem 2014 10 10 16Document4 pagesIjaiem 2014 10 10 16International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Dynamic Model of A Permanent Magnet DC Motor: Projects For StudentsDocument8 pagesDynamic Model of A Permanent Magnet DC Motor: Projects For StudentsAlyssonAlmeidaNo ratings yet
- A 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargeDocument16 pagesA 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargePRAMOD PATIDARNo ratings yet
- 206 FinalDocument7 pages206 FinalHoamzzNo ratings yet
- Numerical Analysis On Torque Motor Dynamics Used inDocument13 pagesNumerical Analysis On Torque Motor Dynamics Used inSharan AnnapuraNo ratings yet
- Design, Construction and Simulation of Tesla Turbine: Keywords - Physical Model, CFD Simulation, RadialDocument9 pagesDesign, Construction and Simulation of Tesla Turbine: Keywords - Physical Model, CFD Simulation, RadialhatemNo ratings yet
- Force CalculationDocument8 pagesForce CalculationAbirami RajagopalNo ratings yet
- Optimization of Static and Dynamic Travel Range of Electrostatically Driven Microbeams Using Particle Swarm OptimizationDocument16 pagesOptimization of Static and Dynamic Travel Range of Electrostatically Driven Microbeams Using Particle Swarm OptimizationAndré SilveiraNo ratings yet
- Introduction To A CDC ModuleDocument50 pagesIntroduction To A CDC Modulebastian jeriasNo ratings yet
- Controlador de Inyectores UIsDocument6 pagesControlador de Inyectores UIsRicardo Bolaños100% (1)
- FinalDocument6 pagesFinaluthman nuhaNo ratings yet
- Eddy Current BrakesDocument14 pagesEddy Current BrakesKaranam KarthikNo ratings yet
- Piezo Literature ReviewDocument7 pagesPiezo Literature ReviewEngineering ProjectNo ratings yet
- Design of TransmissionsDocument3 pagesDesign of TransmissionsRichard GentryNo ratings yet
- Nakayama 2019Document11 pagesNakayama 2019Harsh PatilNo ratings yet
- 高速燃油电磁阀的电磁特性分析与结构优化 Electromagnetic Characteristics Analysis and Structure Optimization of High-Speed Fuel Solenoid ValvesDocument16 pages高速燃油电磁阀的电磁特性分析与结构优化 Electromagnetic Characteristics Analysis and Structure Optimization of High-Speed Fuel Solenoid Valves1045536403No ratings yet
- Computation of The Mutual Inductance Between Circular Filaments With Coil Misalignment PDFDocument5 pagesComputation of The Mutual Inductance Between Circular Filaments With Coil Misalignment PDFphithucNo ratings yet
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiNo ratings yet
- Modeling and Analysis of A Bimorph Piezoelectric Cantilever Beam For Voltage GenerationDocument8 pagesModeling and Analysis of A Bimorph Piezoelectric Cantilever Beam For Voltage GenerationIvan AvramovNo ratings yet
- Novel Method of Estimation of Inertial and Dissipative Parameters of A Railway Pantograph ModelDocument24 pagesNovel Method of Estimation of Inertial and Dissipative Parameters of A Railway Pantograph Modelnikunjsingh04No ratings yet
- Naghsh2021 Article AnInnovativeModelForPredictingDocument20 pagesNaghsh2021 Article AnInnovativeModelForPredictingRiza SuwondoNo ratings yet
- Finite Element Analysis of Cantilever Beam For Optimal Placement of Piezoelectric ActuatorDocument16 pagesFinite Element Analysis of Cantilever Beam For Optimal Placement of Piezoelectric ActuatorKhurram ShehzadNo ratings yet
- Dr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonerDocument6 pagesDr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonernakllkNo ratings yet
- Optimal Design of A High-Speed PMSGDocument13 pagesOptimal Design of A High-Speed PMSGHuynh Thanh AnhNo ratings yet
- 299 PDFDocument18 pages299 PDFfiscal012No ratings yet
- Use of Labview Software For Electromagnetic Calculation of Induction MotorsDocument12 pagesUse of Labview Software For Electromagnetic Calculation of Induction MotorsKundan SumanNo ratings yet
- 2013 - A Piezoelectric Energy Harvester For Rotary MotionDocument8 pages2013 - A Piezoelectric Energy Harvester For Rotary MotionNameNo ratings yet
- International Journal of Non-Linear Mechanics: Hamid M. Sedighi, A. Koochi, Farhang Daneshmand, M. AbadyanDocument11 pagesInternational Journal of Non-Linear Mechanics: Hamid M. Sedighi, A. Koochi, Farhang Daneshmand, M. AbadyanHidan WLNo ratings yet
- Design and Control of Axial-Flux Brushless DC Wheel Motors For Electric Vehicles-Part I Multiobjective Optimal Design and AnalysisDocument10 pagesDesign and Control of Axial-Flux Brushless DC Wheel Motors For Electric Vehicles-Part I Multiobjective Optimal Design and Analysishooshyar100% (1)
- COMSOL - Introduction To AC/DC ModuleDocument46 pagesCOMSOL - Introduction To AC/DC ModuleRafael CoelhoNo ratings yet
- ASEE 2011 PaperDocument10 pagesASEE 2011 PaperrivalharudianNo ratings yet
- Energies: Study of Excitation Characteristics of Traction Machine/Drive SystemsDocument17 pagesEnergies: Study of Excitation Characteristics of Traction Machine/Drive SystemsBala RajuNo ratings yet
- Eddy Current BrakesDocument14 pagesEddy Current BrakesSurya Pratap Singh78% (18)
- Scraper Face Conveyors Dynamic Load ControlDocument6 pagesScraper Face Conveyors Dynamic Load ControlEvgenyNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Asset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture6 CompressedDocument22 pagesAsset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture6 CompressedRahul VasanthNo ratings yet
- q3 DLP Math Wk4d2Document5 pagesq3 DLP Math Wk4d2Cirila MagtaasNo ratings yet
- Ebook PDF Creating Environments For Learning Birth To Age Eight 3rd Edition PDFDocument41 pagesEbook PDF Creating Environments For Learning Birth To Age Eight 3rd Edition PDFmaria.warner876100% (44)
- Advances in Neural Networks in Computational Mechanics and EngineeringDocument46 pagesAdvances in Neural Networks in Computational Mechanics and Engineeringchristian garciaNo ratings yet
- Math002 ReviewerDocument4 pagesMath002 ReviewerIan Bertonel BalcuevaNo ratings yet
- Model Paper For Calculus I Midterm Exam. 2021-2022-1: y Sin X y Cos XDocument4 pagesModel Paper For Calculus I Midterm Exam. 2021-2022-1: y Sin X y Cos XmugahedNo ratings yet
- Mt2176 Further Calculus Study GuideDocument104 pagesMt2176 Further Calculus Study GuideMehrdad AbutalebiNo ratings yet
- Race Car Damping - Some Food For ThoughtDocument30 pagesRace Car Damping - Some Food For ThoughtDionisis SpiliopoulosNo ratings yet
- Faculty of Computer SciencesDocument23 pagesFaculty of Computer Sciencesi notNo ratings yet
- NewtonDocument48 pagesNewtonArsene MawejaNo ratings yet
- Random Variable2Document19 pagesRandom Variable2alan conradoNo ratings yet
- Genmath q1 Mod2 Evaluatingfunctions v2 PDFDocument29 pagesGenmath q1 Mod2 Evaluatingfunctions v2 PDFJohnreyDelosSantosNo ratings yet
- Lec 0813Document10 pagesLec 0813Chevy TeoNo ratings yet
- Torsion of A CurveDocument3 pagesTorsion of A CurveewbNo ratings yet
- DM GTU Study Material Presentations Unit-2 17032021053028AMDocument60 pagesDM GTU Study Material Presentations Unit-2 17032021053028AMmuhammad Shoaib janjuaNo ratings yet
- Glencoe CH 3 EditDocument93 pagesGlencoe CH 3 EditVenkat KrishnanNo ratings yet
- Important Notes of 10th Class Math Exercise 1.4Document8 pagesImportant Notes of 10th Class Math Exercise 1.4Tayyabah ShahNo ratings yet
- Common Technical Definition: QuantificationDocument2 pagesCommon Technical Definition: QuantificationNidaNo ratings yet
- LeaP Math G9 Week 6 7 Q3Document10 pagesLeaP Math G9 Week 6 7 Q3fritzhervinalfonso7No ratings yet
- Statistics and Probability RANDOM SAMPLINGDocument8 pagesStatistics and Probability RANDOM SAMPLINGfaith marceloNo ratings yet
- STA4C04 - Statistical Inference and Quality ControlDocument170 pagesSTA4C04 - Statistical Inference and Quality ControlshanNo ratings yet
- Mathematical Physics by Ab GuptaDocument2 pagesMathematical Physics by Ab GuptaIqbal Gadi100% (1)
- A Bridged CurriculumDocument86 pagesA Bridged Curriculumkaziba stephen100% (1)
- Significant Digits WSDocument2 pagesSignificant Digits WSf8rgpq95ycNo ratings yet
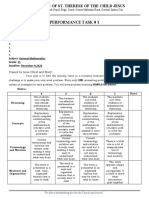
- G11 Genmath Performance TaskDocument4 pagesG11 Genmath Performance TaskDennis AquinoNo ratings yet
- Looking For A Challenge 2 enDocument27 pagesLooking For A Challenge 2 enZaidNo ratings yet
- SUPPORT MATERIAL IX 2020 21 WatermarkDocument140 pagesSUPPORT MATERIAL IX 2020 21 WatermarkShashwat MishraNo ratings yet
- Template - Assignment 1 SM015 2020-2021 PDFDocument2 pagesTemplate - Assignment 1 SM015 2020-2021 PDFKKNo ratings yet
- General Mathematics QuestionsDocument6 pagesGeneral Mathematics QuestionsRyan Paul NionesNo ratings yet