Download as pdf or txt
You might also like
- Thermodynamics Chapter 4 Solution Manual.Document11 pagesThermodynamics Chapter 4 Solution Manual.Nash Fernandez86% (100)
- Problem Chapter 8Document62 pagesProblem Chapter 8Gamas OkaNo ratings yet
- 16 Planar Kinematics of Rigid BodyDocument47 pages16 Planar Kinematics of Rigid BodyzackziffiNo ratings yet
- Velocity Analysis of LinkagesDocument23 pagesVelocity Analysis of Linkagesaddisudagne67% (3)
- Gear and Its Train NumericalDocument3 pagesGear and Its Train NumericalSubidha PaudelNo ratings yet
- Radial Turbines and TurbochargerDocument57 pagesRadial Turbines and Turbochargertgsmech100% (1)
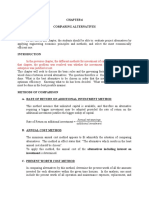
- 6-Comparing AlternativesDocument7 pages6-Comparing AlternativesKlucifer XinNo ratings yet
- 16 1 Translation and Rotation of Rigid Body PDFDocument24 pages16 1 Translation and Rotation of Rigid Body PDFSindhu BabuNo ratings yet
- Planar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabDocument23 pagesPlanar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabYipNo ratings yet
- Acceleration Analysis of MechanismsDocument32 pagesAcceleration Analysis of MechanismsThahir Shah100% (1)
- LEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesDocument7 pagesLEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesfadyNo ratings yet
- Lect Acceleration AnalysisDocument107 pagesLect Acceleration AnalysisTalha Khanzada100% (1)
- Planar Kinematics of A Rigid BodyDocument13 pagesPlanar Kinematics of A Rigid BodyMagicWand2No ratings yet
- Unit2&3 HRDocument60 pagesUnit2&3 HRtarasasankaNo ratings yet
- Velocity AnalysisDocument38 pagesVelocity AnalysisChatur LingamNo ratings yet
- Acceleration Analysis of LinkagesDocument13 pagesAcceleration Analysis of LinkagesaddisudagneNo ratings yet
- Design of Gear: The Standard Values and Equations Taken From Text Book of Machine Design byDocument4 pagesDesign of Gear: The Standard Values and Equations Taken From Text Book of Machine Design byLemi Chala BeyeneNo ratings yet
- Kinematics of Rigid BodiesDocument75 pagesKinematics of Rigid BodiesKelvinNo ratings yet
- Chapter 18: Planar Kinetics of A Rigid Body: Work and EnergyDocument11 pagesChapter 18: Planar Kinetics of A Rigid Body: Work and EnergyMoh'd Daoud QaraqeNo ratings yet
- Kom Unit 2Document24 pagesKom Unit 2Muthuvel M100% (3)
- Chain Drives PPTFDocument44 pagesChain Drives PPTFMadhuNo ratings yet
- Mass Moment of InertiaDocument4 pagesMass Moment of InertiaradityaakNo ratings yet
- Chapter One Two Dimensional Potential Flows Theory: 1.1. Definition of Potential FlowDocument17 pagesChapter One Two Dimensional Potential Flows Theory: 1.1. Definition of Potential FlownunuNo ratings yet
- Unit6 CAMSDocument27 pagesUnit6 CAMSGokulraju RangasamyNo ratings yet
- SolutionsofGears PDFDocument4 pagesSolutionsofGears PDFGautam AdhikariNo ratings yet
- Instantaneous Center of Zero VelocityDocument15 pagesInstantaneous Center of Zero Velocitym_er100No ratings yet
- Tom-I Question Bank UpdatedDocument174 pagesTom-I Question Bank Updatedkiran_wakchaureNo ratings yet
- Three-Dimensional Kinematics of Rigid BodiesDocument16 pagesThree-Dimensional Kinematics of Rigid BodiesTyler HocutNo ratings yet
- VHJJJKDocument17 pagesVHJJJKKhanna Dhinesh100% (1)
- Planer Quick Return MechanismDocument21 pagesPlaner Quick Return MechanismchristadcrNo ratings yet
- Relative MotionDocument3 pagesRelative Motionkaushik247No ratings yet
- Machinery Example Problems Ch12 - GearTeamDocument51 pagesMachinery Example Problems Ch12 - GearTeamGonKilNo ratings yet
- Files Epicyclic Gears Worked ExamplesDocument21 pagesFiles Epicyclic Gears Worked Examplesميدو علىNo ratings yet
- AUTO400 Homework Assignment 1 SOLUTIONDocument16 pagesAUTO400 Homework Assignment 1 SOLUTIONVinoliaEdwin100% (1)
- ME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)Document53 pagesME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)tanvir2013004No ratings yet
- Chapter 12 OneSlideDocument143 pagesChapter 12 OneSlideSupper CoolNo ratings yet
- Basicthermo Compiled TnshridharDocument129 pagesBasicthermo Compiled Tnshridharsohan2902No ratings yet
- ME 230 Kinematics and Dynamics: Wei-Chih WangDocument93 pagesME 230 Kinematics and Dynamics: Wei-Chih WanggNo ratings yet
- Bearing ProblemsDocument16 pagesBearing ProblemsRohit GhulanavarNo ratings yet
- 18ME54 Turbo Machines Module 03 Question No 6a & 6bDocument9 pages18ME54 Turbo Machines Module 03 Question No 6a & 6bThanmay JSNo ratings yet
- Classical MechanicsDocument6 pagesClassical MechanicsSebastian Soto PerdomoNo ratings yet
- Assignment1 Solutions - KNLDocument6 pagesAssignment1 Solutions - KNLsaraNo ratings yet
- Lecture 4 - Design For Variable LoadingDocument37 pagesLecture 4 - Design For Variable LoadingHafiz AbdulRehmanNo ratings yet
- Aerody QuestionsDocument8 pagesAerody QuestionsJecah Angelu S. SaquianNo ratings yet
- Concept of Virtual WorkDocument9 pagesConcept of Virtual WorkBasyaruddin BasyarNo ratings yet
- A First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookDocument285 pagesA First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookheidimary123No ratings yet
- Inertial Mass and Moment of InertiaDocument1 pageInertial Mass and Moment of InertiaKarlish WhiteNo ratings yet
- Screw-Jack - Mechanical Engineering AssignmentDocument25 pagesScrew-Jack - Mechanical Engineering AssignmentMorteza ShakerienNo ratings yet
- Strength of Materials 2 Mark QuestionsDocument21 pagesStrength of Materials 2 Mark Questionsrameshbabu_1979No ratings yet
- Acceleration Analysis ReviewDocument29 pagesAcceleration Analysis ReviewGloria Trigoso LeónNo ratings yet
- Part 3 - Rev1Document42 pagesPart 3 - Rev1jk.fajardo4No ratings yet
- Chap 16Document41 pagesChap 16MugdhoNo ratings yet
- Chapter-16 Planar Kinematics of A Rigid BodyDocument26 pagesChapter-16 Planar Kinematics of A Rigid BodyhamzaNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument52 pagesChapter 16 Planar Kinematics of Rigid BodyMuhd HaqimNo ratings yet
- 16 5 Relative Acceleration PDFDocument24 pages16 5 Relative Acceleration PDFSindhu BabuNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument51 pagesChapter 16 Planar Kinematics of Rigid BodyDawood AbdullahNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument47 pagesChapter 16 Planar Kinematics of Rigid Bodyrana abdul waasay0% (1)
- Plane Motion: Analysis of A Rigid Body in Translation, RotationDocument51 pagesPlane Motion: Analysis of A Rigid Body in Translation, RotationDaniela ParNo ratings yet
- Introduction To Accounting: Caec 1 & 2: Financial Accounting and ReportingDocument6 pagesIntroduction To Accounting: Caec 1 & 2: Financial Accounting and ReportingKlucifer XinNo ratings yet
- Do Rocks Last Forever?: What You Need?Document2 pagesDo Rocks Last Forever?: What You Need?Klucifer XinNo ratings yet
- Module 1-C1 Heat TransferDocument10 pagesModule 1-C1 Heat TransferKlucifer XinNo ratings yet
- DynamicsDocument3 pagesDynamicsKlucifer XinNo ratings yet
- F DP DT DP FDTDocument3 pagesF DP DT DP FDTKlucifer XinNo ratings yet
- Parts of Lathe Machine:: Take Protecting It SeriouslyDocument1 pageParts of Lathe Machine:: Take Protecting It SeriouslyKlucifer XinNo ratings yet
- Objectives Objective 1: Improve The Value Proposition of Enterprise Information Systems by Decreasing TheDocument8 pagesObjectives Objective 1: Improve The Value Proposition of Enterprise Information Systems by Decreasing TheKlucifer XinNo ratings yet
- Formula - Regeratice Rankine CycleDocument1 pageFormula - Regeratice Rankine CycleKlucifer XinNo ratings yet
- How Can The Present Technological and Biological Changes Affect Human EvolutionDocument1 pageHow Can The Present Technological and Biological Changes Affect Human EvolutionKlucifer XinNo ratings yet
- Options Thinking and Platform Investments InvestinDocument21 pagesOptions Thinking and Platform Investments InvestinKlucifer XinNo ratings yet
- Module 1 - Chapter 1 Fluid MechanicsDocument24 pagesModule 1 - Chapter 1 Fluid MechanicsKlucifer Xin100% (4)
- AckmntDocument1 pageAckmntKlucifer XinNo ratings yet
- Acceleration Analysis MethodDocument12 pagesAcceleration Analysis MethodKlucifer XinNo ratings yet
- Education, Opportunity and The Prospects For Social MobilityDocument25 pagesEducation, Opportunity and The Prospects For Social MobilityKlucifer XinNo ratings yet
- Cam and Follower PDFDocument17 pagesCam and Follower PDFKlucifer XinNo ratings yet
- Transformer Construction and Transformer Core DesignDocument14 pagesTransformer Construction and Transformer Core DesignKlucifer XinNo ratings yet
- What Is A Transformer - Definition and Meaning - Circuit GlobeDocument8 pagesWhat Is A Transformer - Definition and Meaning - Circuit GlobeKlucifer XinNo ratings yet
- Working Tools IN WORKSHOPDocument11 pagesWorking Tools IN WORKSHOPKlucifer XinNo ratings yet
- Transformer Basics and Transformer PrinciplesDocument21 pagesTransformer Basics and Transformer PrinciplesKlucifer XinNo ratings yet
- Difference Between Core Type and Shell Type Transformer (With Comparison Chart) - Circuit GlobeDocument9 pagesDifference Between Core Type and Shell Type Transformer (With Comparison Chart) - Circuit GlobeKlucifer XinNo ratings yet
- Problem SetDocument11 pagesProblem SetKlucifer XinNo ratings yet
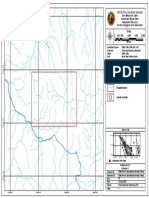
- Peta POLA Aliran SungaiDocument1 pagePeta POLA Aliran SungaiSteven MuhammadNo ratings yet
- Franson Coordtrans For Windows V1.1: User'S GuideDocument9 pagesFranson Coordtrans For Windows V1.1: User'S GuideMamadou ThioyeNo ratings yet
- Topic 6 ALL Answers Pagenumber 1Document38 pagesTopic 6 ALL Answers Pagenumber 1Kevin OktaNo ratings yet
- Dammapeta Mandal: SCALE 1: 50000Document1 pageDammapeta Mandal: SCALE 1: 50000Inapanuri Nageshwara RaoNo ratings yet
- COMPASS ERROR Copy5Document3 pagesCOMPASS ERROR Copy5Francis ParisNo ratings yet
- Gyro Error GuideDocument2 pagesGyro Error GuideFrancis ParisNo ratings yet
- Chapter-16 Planar Kinematics of A Rigid BodyDocument26 pagesChapter-16 Planar Kinematics of A Rigid BodyhamzaNo ratings yet
- Vibration Analysis of Turbo Machines - Case Studies - Murilo CamisãoDocument67 pagesVibration Analysis of Turbo Machines - Case Studies - Murilo Camisãojoao batista alvesNo ratings yet
- Understanding Differentiation: Bridge CourseDocument7 pagesUnderstanding Differentiation: Bridge CourseAZTECIANO SORCERERNo ratings yet
- Lesson 07 Fluid MechanicsDocument60 pagesLesson 07 Fluid MechanicsrnlpzcyNo ratings yet
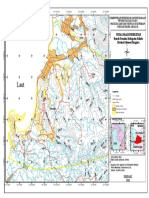
- Peta Penelitian ANDREDocument1 pagePeta Penelitian ANDREStevenNo ratings yet
- This Study Resource Was: Student Exploration: Distance-Time and Velocity-Time GraphsDocument6 pagesThis Study Resource Was: Student Exploration: Distance-Time and Velocity-Time GraphsblueberryNo ratings yet
- AP Physics 1 Algebra Based Unit 5 MomentumDocument7 pagesAP Physics 1 Algebra Based Unit 5 MomentumNikhita RajeshNo ratings yet
- Projectile MotionDocument5 pagesProjectile MotionAbiegail Asas PelenioNo ratings yet
- 6 Intro To Open Channel FlowDocument17 pages6 Intro To Open Channel FlowLee CastroNo ratings yet
- Consador Bohr PetaDocument9 pagesConsador Bohr PetaZyanne Vernice ConsadorNo ratings yet
- General Physics1: Quarter 1 - Module 4: Title: Kinematics: Motion in 2-3 DimensionsDocument23 pagesGeneral Physics1: Quarter 1 - Module 4: Title: Kinematics: Motion in 2-3 DimensionsDiana Silva Hernandez0% (1)
- Assignment 2Document4 pagesAssignment 2IyahNo ratings yet
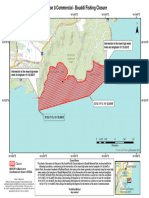
- Bouddi National Park Fishing Exclusion ZoneDocument1 pageBouddi National Park Fishing Exclusion ZonejdhjdhjdhNo ratings yet
- PHYF115 MidtermExam - Questions - T1Y2021Document4 pagesPHYF115 MidtermExam - Questions - T1Y2021WilfredNo ratings yet
- Long Questions Part 1Document3 pagesLong Questions Part 1Sajid AliNo ratings yet
- How To Read A MapDocument81 pagesHow To Read A MapSHS Crystal QuiñanoNo ratings yet
- Projection and Transformation CalculationsDocument38 pagesProjection and Transformation CalculationsMichael MatshonaNo ratings yet
- Describing Motion: Kinematics in One Dimension: Chapter-Opening QuestionDocument28 pagesDescribing Motion: Kinematics in One Dimension: Chapter-Opening QuestionDrewHayashiNo ratings yet
- Chapter Three Velocity AnalysisDocument57 pagesChapter Three Velocity Analysismekete mulualemNo ratings yet
- Technical Description: BoundariesDocument3 pagesTechnical Description: BoundariesJohn Rey MontemorNo ratings yet
- Nav. 1Document16 pagesNav. 1Md Shariful IslamNo ratings yet
- Einsteins Tea ParadoxDocument8 pagesEinsteins Tea ParadoxSaurav MitraNo ratings yet
- Pipeline Design BasisDocument26 pagesPipeline Design BasisMajid Dixon100% (1)
- Modeldocument PETDocument37 pagesModeldocument PETarun rajaramNo ratings yet