Download as pdf or txt
You might also like
- Instructions For Using SimpleDyno 6.5Document40 pagesInstructions For Using SimpleDyno 6.5maxdan11167% (3)
- Construction and Building Materials: Jian Hui Lim, Yiwei Weng, Quang-Cuong PhamDocument10 pagesConstruction and Building Materials: Jian Hui Lim, Yiwei Weng, Quang-Cuong PhamficuniNo ratings yet
- The Gender and Environment Debate Bina Agarwal PDFDocument10 pagesThe Gender and Environment Debate Bina Agarwal PDFVidushi Thapliyal100% (2)
- Large-Scale 3D Printing of Ultra-High Performance Concrete - A New Processing Route For Architects and BuildersDocument8 pagesLarge-Scale 3D Printing of Ultra-High Performance Concrete - A New Processing Route For Architects and Buildershamed sadaghianNo ratings yet
- Mix Design and Fresh Properties For High-Performance Printing ConcreteDocument25 pagesMix Design and Fresh Properties For High-Performance Printing ConcreteIlhame HarNo ratings yet
- Artigo Nuno FrutuosoDocument10 pagesArtigo Nuno FrutuosoCesar VasquesNo ratings yet
- Screw Extrusion Based 3D Printing, A Novel Additive Manufacturing TechnologyDocument7 pagesScrew Extrusion Based 3D Printing, A Novel Additive Manufacturing TechnologyPaulo Canedo da SilvaNo ratings yet
- Matecconf Orsdce2018 01013 PDFDocument9 pagesMatecconf Orsdce2018 01013 PDFanon_682200357No ratings yet
- Synopsis 3D Concrete PrinterDocument9 pagesSynopsis 3D Concrete PrinterRakshith Nk KashyapNo ratings yet
- Hardened Properties of ConcreteDocument9 pagesHardened Properties of ConcreteRaghavendraSNo ratings yet
- Additive Manufacturing: Processes and Standard TerminologyDocument6 pagesAdditive Manufacturing: Processes and Standard TerminologyABDELHAKIMNo ratings yet
- Additive Manufacturing of Cantilever - From Masonry To Concrete 3DDocument16 pagesAdditive Manufacturing of Cantilever - From Masonry To Concrete 3DAliReza ZiaratiNo ratings yet
- Mix Design HP Print ConcreteDocument12 pagesMix Design HP Print ConcretecpessoasalesNo ratings yet
- Experimental Investigation of Effects of Build Parameters On Flexural Properties in Fused Deposition Modelling PartsDocument15 pagesExperimental Investigation of Effects of Build Parameters On Flexural Properties in Fused Deposition Modelling PartsAnonymous 5AmJ13mLkNo ratings yet
- 3D Printing Using Concrete Extrusion: A Roadmap For Research 3D Printing Using Concrete Extrusion: A Roadmap For ResearchDocument14 pages3D Printing Using Concrete Extrusion: A Roadmap For Research 3D Printing Using Concrete Extrusion: A Roadmap For ResearchficuniNo ratings yet
- Improved Inverse Design Method For Thin-Wall Hollow Profiled Polymer Extrusion Die Based On FEM-CFD SimulationsDocument11 pagesImproved Inverse Design Method For Thin-Wall Hollow Profiled Polymer Extrusion Die Based On FEM-CFD SimulationsARSALAN AHMADNo ratings yet
- Designing and Manufacturing of A Low-Cost Carbon Fiber Reinforced Composite Suborbital Rocket Payload Housing Using A 3D Printed CoreDocument13 pagesDesigning and Manufacturing of A Low-Cost Carbon Fiber Reinforced Composite Suborbital Rocket Payload Housing Using A 3D Printed CoreAdven TuresNo ratings yet
- Effect of Printing Parameters - Support Structures - Tay2019Document10 pagesEffect of Printing Parameters - Support Structures - Tay2019AliReza ZiaratiNo ratings yet
- Applied SciencesDocument17 pagesApplied Sciences18-29 SAKETH REDDY MECH III-ANo ratings yet
- Additive Manufacturing: Alberto Boschetto, Luana Bottini, Francesco VenialiDocument11 pagesAdditive Manufacturing: Alberto Boschetto, Luana Bottini, Francesco VenialiAbdullah UYSALNo ratings yet
- Mix Design and Fresh Properties For HPPC (A Relire)Document25 pagesMix Design and Fresh Properties For HPPC (A Relire)Mounia Ait Ben HamouNo ratings yet
- Rotoform - Realization of Hollow Construction Elements Through Roto-Forming With Hyper-Elastic Membrane FormworkDocument7 pagesRotoform - Realization of Hollow Construction Elements Through Roto-Forming With Hyper-Elastic Membrane FormworkAkash RogerNo ratings yet
- Design and Development of Cellular Structures For Additive ManufacturingDocument10 pagesDesign and Development of Cellular Structures For Additive ManufacturingSeçkin KoçNo ratings yet
- Nazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingDocument17 pagesNazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingIgnacio VillaNo ratings yet
- ItalyDocument18 pagesItalynamasse.medamineNo ratings yet
- Computer-Aided Design: Mokwon Lee, Qing Fang, Youngsong Cho, Joonghyun Ryu, Ligang Liu, Deok-Soo KimDocument14 pagesComputer-Aided Design: Mokwon Lee, Qing Fang, Youngsong Cho, Joonghyun Ryu, Ligang Liu, Deok-Soo KimRoy ZamoraNo ratings yet
- Integrated Lightweight Design Method Via Structural Optimization and Path Planning For Material ExtrusionDocument13 pagesIntegrated Lightweight Design Method Via Structural Optimization and Path Planning For Material ExtrusionRancho vonNo ratings yet
- J Autcon 2018 05 005Document11 pagesJ Autcon 2018 05 005Imrul Kayes KhanNo ratings yet
- Backbone Cup - A Structure Design Competition Based On Topology Optimization and 3D PrintingDocument6 pagesBackbone Cup - A Structure Design Competition Based On Topology Optimization and 3D PrintingEsteban Jurko ENo ratings yet
- Optimization of FDM Process Parameters To Minimize Surface Roughness With Integrated Artificial Neural Network Model and Symbiotic Organism SearchDocument17 pagesOptimization of FDM Process Parameters To Minimize Surface Roughness With Integrated Artificial Neural Network Model and Symbiotic Organism SearchJyotisMan BorahNo ratings yet
- FIBERSIMDocument9 pagesFIBERSIMTakis PlimirasNo ratings yet
- Refuerzo Acero Impreso 3D para La Construcción de Hormigón Digital Fabricación, Propiedades Mecánicas y Comportamiento de Adherenci PDFDocument13 pagesRefuerzo Acero Impreso 3D para La Construcción de Hormigón Digital Fabricación, Propiedades Mecánicas y Comportamiento de Adherenci PDFGEYLI YURELI BLANCO PRADANo ratings yet
- A Parametric Strategy For Free-Form Glass Structures Using Quadrilateral Planar FacetsDocument16 pagesA Parametric Strategy For Free-Form Glass Structures Using Quadrilateral Planar FacetsStanislas PetitNo ratings yet
- Additive Manufacturing LettersDocument8 pagesAdditive Manufacturing Letterssrinathgudur11No ratings yet
- Additive Formwork PDFDocument6 pagesAdditive Formwork PDFMrWerbeSpotsNo ratings yet
- Additive Thermoplastic Formwork For Freeform Concrete ColumnsDocument10 pagesAdditive Thermoplastic Formwork For Freeform Concrete Columnshamed sadaghianNo ratings yet
- Printing Cantilever Carneau IASS 2019Document10 pagesPrinting Cantilever Carneau IASS 2019AliReza ZiaratiNo ratings yet
- Programming For Design: Minimising Material Wastage in Shells Using PerforationsDocument8 pagesProgramming For Design: Minimising Material Wastage in Shells Using PerforationsEllie MarshNo ratings yet
- Current Opinion in Solid State & Materials Science: Chao Hu, Qing-Hua QinDocument26 pagesCurrent Opinion in Solid State & Materials Science: Chao Hu, Qing-Hua Qinmohd asrofi muslimNo ratings yet
- 2021+FDM+IOP Conference PaperDocument12 pages2021+FDM+IOP Conference Paperkuldeep sharmaNo ratings yet
- Wear Assessment of 3-D Printed Parts of PLA (Polylactic Acid) Using Taguchi Design and Artificial Neural Network (ANN) TechniqueDocument16 pagesWear Assessment of 3-D Printed Parts of PLA (Polylactic Acid) Using Taguchi Design and Artificial Neural Network (ANN) TechniqueArturo CervantesNo ratings yet
- Circular Concrete Construction Through Additive FDM FormworkDocument10 pagesCircular Concrete Construction Through Additive FDM Formworkhamed sadaghianNo ratings yet
- A Review of Applications in 4D PrintingDocument11 pagesA Review of Applications in 4D PrintingIorga SandraNo ratings yet
- Dimensional Tolerances For Additive Manufacturing: Experimental Investigation For Fused Deposition ModelingDocument6 pagesDimensional Tolerances For Additive Manufacturing: Experimental Investigation For Fused Deposition ModelingChris BurgerNo ratings yet
- Fused Deposition Modeling (FDM) Custom Internal Filling Structural Mechanics SimulationDocument9 pagesFused Deposition Modeling (FDM) Custom Internal Filling Structural Mechanics SimulationDicky Pratama PutraNo ratings yet
- Construction and Building MaterialsDocument9 pagesConstruction and Building MaterialsMazharYasinNo ratings yet
- 10 1016@j Autcon 2019 103005Document19 pages10 1016@j Autcon 2019 103005Yared derejeNo ratings yet
- Clay Robotics: A Hybrid 3D Printing Casting ProcessDocument6 pagesClay Robotics: A Hybrid 3D Printing Casting ProcessKelvinNo ratings yet
- The Application of Composite Through-Thickness Assessment To Additively Manufactured StructuresDocument17 pagesThe Application of Composite Through-Thickness Assessment To Additively Manufactured StructuresDiego LeonNo ratings yet
- DILIP 2011 Use of Friction Surfacing For Additive ManufacturingDocument7 pagesDILIP 2011 Use of Friction Surfacing For Additive Manufacturingapt.dwdi.iitbNo ratings yet
- New Paradigms in Hierarchical Porous Scaffold Design For Tissue EngineeringDocument14 pagesNew Paradigms in Hierarchical Porous Scaffold Design For Tissue EngineeringRob GNNo ratings yet
- 3D Printed Formwork For Concrete State-Of-The-Art PDFDocument24 pages3D Printed Formwork For Concrete State-Of-The-Art PDFMrWerbeSpotsNo ratings yet
- Materials: Extrusion-Based 3D Printing of Ceramic Pastes: Mathematical Modeling and in Situ Shaping Retention ApproachDocument22 pagesMaterials: Extrusion-Based 3D Printing of Ceramic Pastes: Mathematical Modeling and in Situ Shaping Retention ApproachjoshNo ratings yet
- Mechanical Properties of Triply Periodic Minimal Surface Based Lattices Made by Polyjet PrintingDocument7 pagesMechanical Properties of Triply Periodic Minimal Surface Based Lattices Made by Polyjet Printingxu.dachong59No ratings yet
- Additive Manufacturing of Metallic Based On Extrusion Process - A ReviewDocument10 pagesAdditive Manufacturing of Metallic Based On Extrusion Process - A ReviewVidyanti AnggraeniNo ratings yet
- 1 Effect of MicrospheresDocument8 pages1 Effect of MicrospheresRehan SharmaNo ratings yet
- Fabricación Aditiva de Geopolímeros para Un Entorno Construido SostenibleDocument8 pagesFabricación Aditiva de Geopolímeros para Un Entorno Construido SostenibleGEYLI YURELI BLANCO PRADANo ratings yet
- Recent Advances in Ink-Based Additive Manu Acturing or Porous Structures - 2021Document23 pagesRecent Advances in Ink-Based Additive Manu Acturing or Porous Structures - 2021Ankit Tripathi Res. Scholar, Mechanical Engg., IIT(BHU)No ratings yet
- AM of Ceramic Based MaterialsDocument26 pagesAM of Ceramic Based MaterialsGuglielmoCelleraiNo ratings yet
- 1 s2.0 S0926580519305096 Main PDFDocument11 pages1 s2.0 S0926580519305096 Main PDFManu K MohanNo ratings yet
- 1 s2.0 S0926580519305096 Main PDFDocument11 pages1 s2.0 S0926580519305096 Main PDFManu K MohanNo ratings yet
- 1-S2.0-S0924013602001413-Main (2002)Document11 pages1-S2.0-S0924013602001413-Main (2002)MAV2804No ratings yet
- Accepted ManuscriptDocument47 pagesAccepted ManuscriptficuniNo ratings yet
- Kiani 2018Document22 pagesKiani 2018ficuniNo ratings yet
- Lezgy Nazargah2015Document41 pagesLezgy Nazargah2015ficuniNo ratings yet
- NURBS HSDT RevisedDocument39 pagesNURBS HSDT RevisedficuniNo ratings yet
- 1 s2.0 S0263823118306839 MainDocument13 pages1 s2.0 S0263823118306839 MainficuniNo ratings yet
- 1 s2.0 S0263822319338735 MainDocument12 pages1 s2.0 S0263822319338735 MainficuniNo ratings yet
- Gupta 2017Document8 pagesGupta 2017ficuniNo ratings yet
- 1 s2.0 S0045782518305462 MainDocument28 pages1 s2.0 S0045782518305462 MainficuniNo ratings yet
- Kapoor 2013Document12 pagesKapoor 2013ficuniNo ratings yet
- 2 TubesmallDocument12 pages2 TubesmallficuniNo ratings yet
- Composite Structures: Hitesh Kapoor, R.K. KapaniaDocument14 pagesComposite Structures: Hitesh Kapoor, R.K. KapaniaficuniNo ratings yet
- XXXXXXXXXXXX Proof XXXXXXXXXXXXXXXDocument16 pagesXXXXXXXXXXXX Proof XXXXXXXXXXXXXXXficuniNo ratings yet
- Overlapping Multi-Patch Structures in Isogeometric Analysis: SciencedirectDocument29 pagesOverlapping Multi-Patch Structures in Isogeometric Analysis: SciencedirectficuniNo ratings yet
- Composites Part A: Jingchuan Zhang, Jialiang Wang, Sufen Dong, Xun Yu, Baoguo Han TDocument13 pagesComposites Part A: Jingchuan Zhang, Jialiang Wang, Sufen Dong, Xun Yu, Baoguo Han TficuniNo ratings yet
- Theories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsDocument54 pagesTheories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsficuniNo ratings yet
- Automation in Construction: Taylor Marchment, Jay Sanjayan TDocument12 pagesAutomation in Construction: Taylor Marchment, Jay Sanjayan TficuniNo ratings yet
- SPE-180110-MS An Application of The Isogeometric Analysis Method To Reservoir SimulationDocument10 pagesSPE-180110-MS An Application of The Isogeometric Analysis Method To Reservoir SimulationficuniNo ratings yet
- Construction and Building Materials: R. Jayathilakage, P. Rajeev, J.G. SanjayanDocument15 pagesConstruction and Building Materials: R. Jayathilakage, P. Rajeev, J.G. SanjayanficuniNo ratings yet
- An Introduction To Standard and Enriched IsogeometDocument93 pagesAn Introduction To Standard and Enriched IsogeometficuniNo ratings yet
- Isogeometric Analysis of Plane-Curved BeamsDocument19 pagesIsogeometric Analysis of Plane-Curved BeamsficuniNo ratings yet
- Isogeometric Analysis of Shear Bands PDFDocument19 pagesIsogeometric Analysis of Shear Bands PDFficuniNo ratings yet
- Optimum Structural Design Based On Isogeometric Analysis MethodDocument5 pagesOptimum Structural Design Based On Isogeometric Analysis MethodficuniNo ratings yet
- Isogeometric Fluid-Structure Interaction: Theory, Algorithms, and ComputationsDocument35 pagesIsogeometric Fluid-Structure Interaction: Theory, Algorithms, and ComputationsficuniNo ratings yet
- Isogeometric Finite Element Data Structu PDFDocument31 pagesIsogeometric Finite Element Data Structu PDFficuniNo ratings yet
- A New Rotation-Free Isogeometric Thin Shell Formulation and A Corresponding Continuity Constraint For Patch BoundariesDocument41 pagesA New Rotation-Free Isogeometric Thin Shell Formulation and A Corresponding Continuity Constraint For Patch BoundariesficuniNo ratings yet
- Journal of Fluids and StructuresDocument32 pagesJournal of Fluids and StructuresficuniNo ratings yet
- Nguyen-Xuan2014 Article UpperBoundLimitAnalysisOfPlateDocument29 pagesNguyen-Xuan2014 Article UpperBoundLimitAnalysisOfPlateficuniNo ratings yet
- Extreme Mechanics Letters: R.M.J. Groh, A. PirreraDocument7 pagesExtreme Mechanics Letters: R.M.J. Groh, A. PirreraficuniNo ratings yet
- Yaskawa Alarms Faults 3735Document18 pagesYaskawa Alarms Faults 3735charlydigitalNo ratings yet
- Alg3 & Trig2 - Practice QuestionsDocument8 pagesAlg3 & Trig2 - Practice QuestionsAbdullah NHNo ratings yet
- Cohen 1967Document14 pagesCohen 1967Easa YahiyaNo ratings yet
- Useful Expressions To Express Your OpinionDocument2 pagesUseful Expressions To Express Your OpinionbttNo ratings yet
- Cabinet Thermal Solutions: Web: EmailDocument8 pagesCabinet Thermal Solutions: Web: EmailXiaofeng XuNo ratings yet
- Advanced Steel DesignDocument2 pagesAdvanced Steel DesignVaneeta SainiNo ratings yet
- 1 Indicator Function: Subject - Statistics Paper - Probability Module - Set Theory - Few Combinatorial ResultsDocument4 pages1 Indicator Function: Subject - Statistics Paper - Probability Module - Set Theory - Few Combinatorial ResultsEdy AlenquerNo ratings yet
- Reasons For Conducting Literature ReviewDocument4 pagesReasons For Conducting Literature Reviewfvhvmqqj100% (1)
- BriefingDocument2 pagesBriefingmiguelambarahonaNo ratings yet
- Notification Admin AssistantDocument4 pagesNotification Admin AssistantAchint GuptaNo ratings yet
- Method For Producing Isopropanol by Acetone Hydrogenation: Download PDF Find Prior Art SimilarDocument8 pagesMethod For Producing Isopropanol by Acetone Hydrogenation: Download PDF Find Prior Art SimilaracetilenaNo ratings yet
- Grade-11 Unit-1 WritingDocument25 pagesGrade-11 Unit-1 Writingkhoonchosint350No ratings yet
- BEEE Unit 1.3Document16 pagesBEEE Unit 1.3senthil kumar rasappanNo ratings yet
- QQQ - Pureyr2 - Chapter 3 - Sequences & Series (V2) : Total Marks: 42Document4 pagesQQQ - Pureyr2 - Chapter 3 - Sequences & Series (V2) : Total Marks: 42Medical ReviewNo ratings yet
- 2foundation Moments Hydraulics and CM Self Study QuestionsDocument40 pages2foundation Moments Hydraulics and CM Self Study QuestionsAngel TeyNo ratings yet
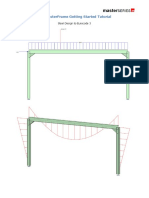
- T00 MasterFrame Getting Started Tutorial PDFDocument36 pagesT00 MasterFrame Getting Started Tutorial PDFJEMAYERNo ratings yet
- Climate Responsive Building Design in The Kathmandu Valley: ArticleDocument9 pagesClimate Responsive Building Design in The Kathmandu Valley: ArticleRKNo ratings yet
- H4 Residential - Mixed Housing Suburban ZoneDocument30 pagesH4 Residential - Mixed Housing Suburban ZonekizonzNo ratings yet
- DLL - English 5 - Q3 - W4Document12 pagesDLL - English 5 - Q3 - W4Edwin GervacioNo ratings yet
- Language in International Business - Developing A Field - Mary Yoko Brannen, Terry Mughan (Eds.) - JIBS Special Collections, 1, 2017 - Palgrave Macmillan - 9783319427447 - Anna's ArchiveDocument318 pagesLanguage in International Business - Developing A Field - Mary Yoko Brannen, Terry Mughan (Eds.) - JIBS Special Collections, 1, 2017 - Palgrave Macmillan - 9783319427447 - Anna's ArchiveАксанв РыбакNo ratings yet
- Travel Africa EditionDocument166 pagesTravel Africa EditionLuis Falcão100% (1)
- DE10AV22Document16 pagesDE10AV22stillaphenomenonNo ratings yet
- Bonato A An Invitation To Pursuitevasion Games and Graph TheDocument278 pagesBonato A An Invitation To Pursuitevasion Games and Graph Thesamoylov71No ratings yet
- Light and Optic NotesDocument18 pagesLight and Optic NotesNuan Ting NgNo ratings yet
- PDF Physics Notes: The EyeDocument24 pagesPDF Physics Notes: The Eye24velliNo ratings yet
- Sheeting Structure Verification Input DataDocument35 pagesSheeting Structure Verification Input DataanonimusazNo ratings yet
- Physics:: JEE-ADVANCED-2012-P1-Model IDocument1 pagePhysics:: JEE-ADVANCED-2012-P1-Model IJohn CarterNo ratings yet
- File PDFDocument5 pagesFile PDFAljon AvilaNo ratings yet