Download as pdf or txt
You might also like
- Bulldozer - Caterpillar D7R PDFDocument749 pagesBulldozer - Caterpillar D7R PDFVincent Billy83% (6)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Construction CompaniesDocument69 pagesConstruction Companieschethan mahadevNo ratings yet
- CPL PlogDocument2 pagesCPL PlogJacob KnightNo ratings yet
- Analysis of The Contact Stresses in Curvic Couplings of Gas TurbineDocument15 pagesAnalysis of The Contact Stresses in Curvic Couplings of Gas TurbineHoai Anh VuNo ratings yet
- Mmscience - 2021 06 - Prediction of Thermal Growth in A High Speed Spindle by Considering Thermo Mechanical BehaviorDocument8 pagesMmscience - 2021 06 - Prediction of Thermal Growth in A High Speed Spindle by Considering Thermo Mechanical BehaviorShamanth CNo ratings yet
- Cyclic Plasticity Behaviors of Steam Turbine Rotor Subjected To Cyclic Thermal and Mechanical LoadsDocument30 pagesCyclic Plasticity Behaviors of Steam Turbine Rotor Subjected To Cyclic Thermal and Mechanical Loadsomar900314No ratings yet
- 1 s2.0 S135943111633455X Main PDFDocument7 pages1 s2.0 S135943111633455X Main PDFDamianCurcanNo ratings yet
- (Original) Cui Et. Al., 2022Document8 pages(Original) Cui Et. Al., 2022Carolina CamposNo ratings yet
- Crack Growth - Stop BrakingDocument11 pagesCrack Growth - Stop BrakingME5 6097 RITIKNo ratings yet
- b742 PDFDocument10 pagesb742 PDFMayank PatelNo ratings yet
- 1 s2.0 S0007850610000223 MainDocument4 pages1 s2.0 S0007850610000223 MainabdollahzadehNo ratings yet
- Effect of Temperature and Pressure On Stress of Impeller in Axial-Centrifugal Combined CompressorDocument11 pagesEffect of Temperature and Pressure On Stress of Impeller in Axial-Centrifugal Combined CompressorBhaskar NandiNo ratings yet
- Experimental and Finite Element Analysis of Rocker Arm For Bending Failure PDFDocument9 pagesExperimental and Finite Element Analysis of Rocker Arm For Bending Failure PDFPrabu BalaNo ratings yet
- A Comparative Study On The Dynamics of High Speed Spindles With Respect To Different Preload MechanismsDocument14 pagesA Comparative Study On The Dynamics of High Speed Spindles With Respect To Different Preload Mechanismskampung boyNo ratings yet
- An InvestigationDocument8 pagesAn InvestigationBintang SuryoNo ratings yet
- Dynamic Analysis of Loads and Stresses in Connecting RodsDocument10 pagesDynamic Analysis of Loads and Stresses in Connecting RodsJuan Pablo Cano MejiaNo ratings yet
- Bearing Load Analysis and Control of A Motorized High Speed SpindleDocument7 pagesBearing Load Analysis and Control of A Motorized High Speed SpindlehariskuamrNo ratings yet
- A Thermodynamics Coupled Modeling Approach For Analysis and Improvement of High-Speed Motorized Spindle SystemDocument11 pagesA Thermodynamics Coupled Modeling Approach For Analysis and Improvement of High-Speed Motorized Spindle Systemfujy fujyNo ratings yet
- Finite Element Analysis of Thermo-Mechanical Conditions Inside The Piston of A Diesel EngineDocument29 pagesFinite Element Analysis of Thermo-Mechanical Conditions Inside The Piston of A Diesel EngineAbdullah AwanNo ratings yet
- Crankshaft ModelDocument7 pagesCrankshaft Modeldeathjester1No ratings yet
- Applied Mathematical Modelling: Diyi Chen, Cong Ding, Xiaoyi Ma, Pu Yuan, Duoduo BaDocument13 pagesApplied Mathematical Modelling: Diyi Chen, Cong Ding, Xiaoyi Ma, Pu Yuan, Duoduo BajesusorlNo ratings yet
- 1 FEA Stress AnalysisDocument5 pages1 FEA Stress AnalysisAlok SinghNo ratings yet
- Stress Analysis and Weight Reduction of A One-CyliDocument18 pagesStress Analysis and Weight Reduction of A One-CyliAnonymous K3FaYFlNo ratings yet
- Effect of Strain Rate Upon Plastic Flow of SteelDocument12 pagesEffect of Strain Rate Upon Plastic Flow of SteelLily MaNo ratings yet
- Influence of Traction Motor Components On ThermalDocument14 pagesInfluence of Traction Motor Components On Thermalerode els erodeNo ratings yet
- Applied Mathematical Modelling: Daniel Weisz-Patrault, Alain Ehrlacher, Nicolas LegrandDocument18 pagesApplied Mathematical Modelling: Daniel Weisz-Patrault, Alain Ehrlacher, Nicolas LegrandЕвгений БобковNo ratings yet
- Analysis ofDocument11 pagesAnalysis ofdaaanbNo ratings yet
- Heating Calculation Features at Self-Start of Large Asynchronous MotorDocument7 pagesHeating Calculation Features at Self-Start of Large Asynchronous MotorPhil's ChannelNo ratings yet
- A Study Into Crack Growth in A Railway Wheel Under Thermal Stop Brake Loading SpectrumDocument11 pagesA Study Into Crack Growth in A Railway Wheel Under Thermal Stop Brake Loading SpectrumRavi Kiran MeesalaNo ratings yet
- Simulación Numérica Del Rendimiento Hidrodinámico de La Turbina Hidráulica de Posición Variable de La Pala GRUPO 5Document8 pagesSimulación Numérica Del Rendimiento Hidrodinámico de La Turbina Hidráulica de Posición Variable de La Pala GRUPO 5Cristian Polo VallejosNo ratings yet
- Frictional Properties of Rotary Glyd-Ring Under WaDocument9 pagesFrictional Properties of Rotary Glyd-Ring Under WaScaricatore92No ratings yet
- Analysis of The Fatigue Performance of Elastic Rail ClipDocument10 pagesAnalysis of The Fatigue Performance of Elastic Rail ClipsaltbathNo ratings yet
- Lifetime Prediction of Thermo-Mechanical Fatigue For Exhaust ManifoldDocument10 pagesLifetime Prediction of Thermo-Mechanical Fatigue For Exhaust Manifoldram shyamNo ratings yet
- 1 s2.0 S1877705811002499 MainDocument6 pages1 s2.0 S1877705811002499 MainanuNo ratings yet
- Analysis of Temperature Characteristics of High-SpDocument17 pagesAnalysis of Temperature Characteristics of High-SpIrfani Dwi ArifiantoNo ratings yet
- Life Prediction Under Multiaxial FatigueDocument8 pagesLife Prediction Under Multiaxial FatigueYassr ThabitNo ratings yet
- Heat Transfer1Document10 pagesHeat Transfer1emreali1No ratings yet
- Proiect DSPNDocument23 pagesProiect DSPNJohnson CristianNo ratings yet
- Fluid-Structure Coupling Analysis of Deformation and Stress in Impeller of An Axial-Flow Pump With Two-Way PassageDocument11 pagesFluid-Structure Coupling Analysis of Deformation and Stress in Impeller of An Axial-Flow Pump With Two-Way PassagePhượng NguyễnNo ratings yet
- Regulation Law of Turbine and Generator in Organic Rankine Cycle Power Generation Experimental SystemDocument6 pagesRegulation Law of Turbine and Generator in Organic Rankine Cycle Power Generation Experimental Systembook khanNo ratings yet
- Rotor Dynamics of Aircraft Gas Turbine EnginesDocument5 pagesRotor Dynamics of Aircraft Gas Turbine EnginesfengrotorNo ratings yet
- Comparative Assessment For Static Creep and Tension Tension Cyclic Creep Behaviors of Modified 9Cr 1mo Steel 2014 Procedia EngineeringDocument7 pagesComparative Assessment For Static Creep and Tension Tension Cyclic Creep Behaviors of Modified 9Cr 1mo Steel 2014 Procedia EngineeringalkhiatNo ratings yet
- Polymeric MaterialsDocument20 pagesPolymeric MaterialsRomeo RizziNo ratings yet
- Effects of Thermal and Mechanical Combined Load On Blade Stress and Fatigue Life CharacteristicDocument6 pagesEffects of Thermal and Mechanical Combined Load On Blade Stress and Fatigue Life CharacteristicClaudio JuniorNo ratings yet
- AMEDocument10 pagesAMEAli BelhocineNo ratings yet
- Stress Relaxation Aging Behavior and ConstitutiveDocument18 pagesStress Relaxation Aging Behavior and Constitutivebarrera2001No ratings yet
- Analysis and Optimization of Hydraulic Scissor Lift: S. D. Wankhede, S. S. Joshi, L. J. Bagwan, A.V WadmareDocument8 pagesAnalysis and Optimization of Hydraulic Scissor Lift: S. D. Wankhede, S. S. Joshi, L. J. Bagwan, A.V WadmareVedprakashNo ratings yet
- Thermo-Mechanical Axial-Torsion Testing To Assess Workability - Modeling Using Finite Element Method and Experimental ValidationDocument7 pagesThermo-Mechanical Axial-Torsion Testing To Assess Workability - Modeling Using Finite Element Method and Experimental ValidationIsaac SagelNo ratings yet
- Finite Element Analysis of Steam Turbine Rotor of 210 MW Power PlantDocument13 pagesFinite Element Analysis of Steam Turbine Rotor of 210 MW Power PlantEditor IJRITCCNo ratings yet
- A Study On Seamless Tube in The Planetary Rolling ProcesDocument12 pagesA Study On Seamless Tube in The Planetary Rolling ProcesandrreaskinzNo ratings yet
- Adam McPhee - International Journal of Thermal SciencesDocument10 pagesAdam McPhee - International Journal of Thermal SciencesMspavan RaoNo ratings yet
- Design and Analysis of Aero Fin of Aerospace VehicleDocument17 pagesDesign and Analysis of Aero Fin of Aerospace VehicleDhanish KumarNo ratings yet
- Hybrid Modeling and Verification of Disk-Stacked SDocument12 pagesHybrid Modeling and Verification of Disk-Stacked SKhắc Trung VũNo ratings yet
- Influence of T-Shape Tip Clearance On Performance of A Mixed-Flow Pump.Document11 pagesInfluence of T-Shape Tip Clearance On Performance of A Mixed-Flow Pump.POOJA JAISWALNo ratings yet
- Experimental Studies of The Thermal Management SysDocument9 pagesExperimental Studies of The Thermal Management Sysflorin chisNo ratings yet
- Study On Cracks and Process Improvement For Case HDocument17 pagesStudy On Cracks and Process Improvement For Case Hmech054No ratings yet
- Cfa PDFDocument12 pagesCfa PDFnehaNo ratings yet
- Rotary Bending Fatigue Analysis of Shape Memory Alloys 2017Document13 pagesRotary Bending Fatigue Analysis of Shape Memory Alloys 2017Israa NizzarNo ratings yet
- The - Effect - of - Roll - With - Passive - Segment - On - The - Pla - OKUNDUDocument7 pagesThe - Effect - of - Roll - With - Passive - Segment - On - The - Pla - OKUNDUandrreaskinzNo ratings yet
- Actuators: Static Characteristics of A Tilting Five-Pad Journal Bearing With An Asymmetric GeometryDocument23 pagesActuators: Static Characteristics of A Tilting Five-Pad Journal Bearing With An Asymmetric GeometryThanhluan NguyenNo ratings yet
- 2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMDocument10 pages2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMCristiano BeckNo ratings yet
- Stress Distribution and Contact Status Analysis of A Bolted Rotor With Curvic CouplingsDocument16 pagesStress Distribution and Contact Status Analysis of A Bolted Rotor With Curvic CouplingsHoai Anh VuNo ratings yet
- Design and Analysis of Propeller BladeDocument6 pagesDesign and Analysis of Propeller Bladechethan mahadevNo ratings yet
- J Series J: Wheels Used in Wheels Used inDocument1 pageJ Series J: Wheels Used in Wheels Used inchethan mahadevNo ratings yet
- Ball - Lead Screw Sizing ToolDocument4 pagesBall - Lead Screw Sizing Toolchethan mahadevNo ratings yet
- Machine-Learning Error Models For Approximate Solutions To Parameterized Systems of Nonlinear EquationsDocument47 pagesMachine-Learning Error Models For Approximate Solutions To Parameterized Systems of Nonlinear Equationschethan mahadevNo ratings yet
- Physics-Informed Neural Networks For High-Speed Flows: SciencedirectDocument26 pagesPhysics-Informed Neural Networks For High-Speed Flows: Sciencedirectchethan mahadevNo ratings yet
- Assessing The Effectiveness of Data-Driven Time-Domain Condition Indicators in Predicting The Progression of Surface Distress Under Rolling ContactDocument18 pagesAssessing The Effectiveness of Data-Driven Time-Domain Condition Indicators in Predicting The Progression of Surface Distress Under Rolling Contactchethan mahadevNo ratings yet
- EXCLUSIVE FEBRUARY 2020 GA Refresher: Banking & EconomyDocument45 pagesEXCLUSIVE FEBRUARY 2020 GA Refresher: Banking & Economychethan mahadevNo ratings yet
- Kissas 2020Document28 pagesKissas 2020chethan mahadevNo ratings yet
- 5 6334652320046907615 PDFDocument267 pages5 6334652320046907615 PDFchethan mahadevNo ratings yet
- Loan Request For Single-Family Residential Reconstruction: November 18, 20xxDocument8 pagesLoan Request For Single-Family Residential Reconstruction: November 18, 20xxchethan mahadevNo ratings yet
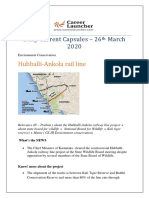
- Hubballi-Ankola Rail Line: Daily Current Capsules - 26 March 2020Document7 pagesHubballi-Ankola Rail Line: Daily Current Capsules - 26 March 2020chethan mahadevNo ratings yet
- ET ISO 6445 (2005) (English) : Doors - Behaviour Between Two Different Climates - Test MethodDocument21 pagesET ISO 6445 (2005) (English) : Doors - Behaviour Between Two Different Climates - Test MethodBálint PóthNo ratings yet
- ENPS - Contribution ManualDocument31 pagesENPS - Contribution ManualSwati Rohan JadhavNo ratings yet
- Regisration Report Part 2 BOQDocument42 pagesRegisration Report Part 2 BOQDaniel KariukiNo ratings yet
- Screwjack OkDocument19 pagesScrewjack Okkrushna NikamNo ratings yet
- Cv&experience Certificate Senior Electrical EngineerDocument20 pagesCv&experience Certificate Senior Electrical EngineerRAedNo ratings yet
- Fonte ATX 220W - WISE WSNG-500-P4B2S-SK (WT7520)Document3 pagesFonte ATX 220W - WISE WSNG-500-P4B2S-SK (WT7520)Ismael Soares100% (1)
- PrintedDocument7 pagesPrintedFari PratomosiwiNo ratings yet
- Operating Instructions: KX-TG5621Document56 pagesOperating Instructions: KX-TG5621MazeTechieNo ratings yet
- Dire Dewa Motor Agences (2) - 1Document50 pagesDire Dewa Motor Agences (2) - 1Äbřîśh Łìj MęŘãNo ratings yet
- JNTUK - List of Ratified Principals & Faculty - Covering Letter 19.09.2016Document2 pagesJNTUK - List of Ratified Principals & Faculty - Covering Letter 19.09.2016Raghavendra KilariNo ratings yet
- Famous Castles of RavenloftDocument2 pagesFamous Castles of RavenloftDiogo Eddino FernandesNo ratings yet
- JP-JXH-GELCatalogue 2019 (MPower Plus) NewDocument6 pagesJP-JXH-GELCatalogue 2019 (MPower Plus) NewHappy TourisiantoNo ratings yet
- Horse GateDocument8 pagesHorse GateAnonymous zxNqk81I7No ratings yet
- 3RD-SUMMATIVE-TEST ReviewerDocument3 pages3RD-SUMMATIVE-TEST ReviewerMarilou Versales89% (9)
- Mongolie Litllevenice Crea Yrmh Apd01 20220809Document16 pagesMongolie Litllevenice Crea Yrmh Apd01 20220809Бямбасүрэн ЛхагвадоржNo ratings yet
- ARC Field Instrument 2008 Data-Pub - 2009 PDFDocument149 pagesARC Field Instrument 2008 Data-Pub - 2009 PDFQIA_WealthNo ratings yet
- TEU - FD (G) 15-40 Manual de PartesDocument166 pagesTEU - FD (G) 15-40 Manual de PartesescargoservicioNo ratings yet
- Using Oracle Database Cloud Database Schema ServiceDocument103 pagesUsing Oracle Database Cloud Database Schema ServiceCarryNLNo ratings yet
- En10272 PDFDocument42 pagesEn10272 PDFLambertWayneNo ratings yet
- Filler Wire For MIG/MAG Welding IRS M-46-2003 (With Amendment No.1)Document1 pageFiller Wire For MIG/MAG Welding IRS M-46-2003 (With Amendment No.1)Lakhwant Singh KhalsaNo ratings yet
- Positive Displacement PumpsDocument13 pagesPositive Displacement Pumpsahmad100% (1)
- Paper Cork GranulatesDocument13 pagesPaper Cork GranulatesAnonymous omGSHUEQNo ratings yet
- 4.Jsp ElementsDocument4 pages4.Jsp ElementsjagadeeshNo ratings yet
- Wooden Toy Road Grader Plans: List of MaterialsDocument13 pagesWooden Toy Road Grader Plans: List of Materialsasep ridwan0% (1)
- Faktor Abiotik Yang Mempengaruhi Pertumbuhan Tanaman Pada Tanah GambutDocument8 pagesFaktor Abiotik Yang Mempengaruhi Pertumbuhan Tanaman Pada Tanah GambutRafli Fadillah LubisNo ratings yet
- CBT QustionDocument3 pagesCBT Qustionneelapu mahesh reddyNo ratings yet
- Wallaert J J, Fisher J W. Shear Strength of High-Strength Bolts - 1964Document61 pagesWallaert J J, Fisher J W. Shear Strength of High-Strength Bolts - 1964徐蒋张No ratings yet
- CPIE-2016 Paper 21 PDFDocument9 pagesCPIE-2016 Paper 21 PDFAtul ChauhanNo ratings yet