Download as pdf or txt
You might also like
- 343 400Document58 pages343 400MakaraSoyNo ratings yet
- 8 CW 5-2Document2 pages8 CW 5-2Kayla IkumaNo ratings yet
- Finite Element Analysis of Structures: M A M N e FDocument25 pagesFinite Element Analysis of Structures: M A M N e FhoneybNo ratings yet
- Response To Arbitrary Time-Varying Forces: Expected OutcomeDocument33 pagesResponse To Arbitrary Time-Varying Forces: Expected Outcomepattrapong pongpattraNo ratings yet
- 1.LT & Xii Neet GT 2 (Set - 2) (20-04-2024)Document6 pages1.LT & Xii Neet GT 2 (Set - 2) (20-04-2024)Palalochana KarriNo ratings yet
- Dec 2011 MidtermDocument6 pagesDec 2011 MidtermChachi CNo ratings yet
- Chapter2 v2 3 PubfDocument22 pagesChapter2 v2 3 PubfMahmoud AlaaNo ratings yet
- Equal Damping&Sitiffness0Document11 pagesEqual Damping&Sitiffness0Angga Fajar SetiawanNo ratings yet
- Intensive Program For Neet-2021: Complete Syllabus of NEETDocument18 pagesIntensive Program For Neet-2021: Complete Syllabus of NEETAshay BalkiNo ratings yet
- BGR Bipolar JSSC 1976 IntegratedDocument4 pagesBGR Bipolar JSSC 1976 Integratedgupt_82No ratings yet
- Mid Term 2012Document7 pagesMid Term 2012Chachi CNo ratings yet
- NFEM Ch08Document14 pagesNFEM Ch08Rafael AbreuNo ratings yet
- Full Syllabus Test Papter No.-04 - Rishabh Sir - AnilDocument18 pagesFull Syllabus Test Papter No.-04 - Rishabh Sir - Anildigvijay singh100% (1)
- WORK, POWER, ENERGY & MOMENTUM Important QuestionsDocument18 pagesWORK, POWER, ENERGY & MOMENTUM Important QuestionsRavindra KumarNo ratings yet
- Displacement of Beams: 8.1 Double Integration MethodDocument18 pagesDisplacement of Beams: 8.1 Double Integration MethodwinzNo ratings yet
- Physics: Iit-Jam Physics (2012 Paper)Document6 pagesPhysics: Iit-Jam Physics (2012 Paper)Subha NayakNo ratings yet
- Physics 2017Document32 pagesPhysics 2017milapdhruvcomputerworkNo ratings yet
- Structural BracingDocument4 pagesStructural BracingjohnnybebadNo ratings yet
- Chapter 4: Axial Members, Beams, and FramesDocument72 pagesChapter 4: Axial Members, Beams, and FramesdesmondlimmNo ratings yet
- Mathongo Jee Main 2019 12 January Evening ShiftDocument33 pagesMathongo Jee Main 2019 12 January Evening ShiftMadhurNo ratings yet
- Massachusetts Institute of Technology: Reading AssignmentDocument4 pagesMassachusetts Institute of Technology: Reading AssignmentAnand J LNo ratings yet
- 10 Computational ProblemsDocument10 pages10 Computational ProblemsWawan RuswandiNo ratings yet
- PHY5113 TUTORIAL N0 3 Questions PDFDocument9 pagesPHY5113 TUTORIAL N0 3 Questions PDFAlbertNo ratings yet
- II. Bar Element: Consider A Uniform Prismatic Bar: U U A, EDocument9 pagesII. Bar Element: Consider A Uniform Prismatic Bar: U U A, ENadher Al-BaghdadiNo ratings yet
- Mech 2 Lecture 5Document35 pagesMech 2 Lecture 5BADR ESLAMNo ratings yet
- Assignment 2 2015 AAiTDocument5 pagesAssignment 2 2015 AAiTMISKIR TADESSENo ratings yet
- Physics STPM 2005 AnswerDocument23 pagesPhysics STPM 2005 AnswersuhailieliasNo ratings yet
- Mech 2 Lecture 4Document42 pagesMech 2 Lecture 4BADR ESLAMNo ratings yet
- Neet PapersDocument21 pagesNeet PapersSabari NathanNo ratings yet
- Dynamic Anlysis of The Wind Response of Tall Industrial Chimney With Flexibleity of SoilDocument45 pagesDynamic Anlysis of The Wind Response of Tall Industrial Chimney With Flexibleity of SoilG.RameshNo ratings yet
- ALPS 2309 Physics AssignmentDocument16 pagesALPS 2309 Physics AssignmentSujal KapoorNo ratings yet
- Acoustics Laboratory Guide 2 (Sessions 3 & 4)Document6 pagesAcoustics Laboratory Guide 2 (Sessions 3 & 4)cesarpiquerastNo ratings yet
- Fu 1998Document19 pagesFu 1998nevinkoshyNo ratings yet
- P01S V37No4Y2013Document16 pagesP01S V37No4Y2013capicaNo ratings yet
- Physics (Solution)Document8 pagesPhysics (Solution)Ankit GuptaNo ratings yet
- Chap 2 Mathematical Model of Continuous SystemsDocument63 pagesChap 2 Mathematical Model of Continuous SystemsTrần Hoài BảoNo ratings yet
- Frequency of Free Damped Vibrations (Viscous Damping)Document8 pagesFrequency of Free Damped Vibrations (Viscous Damping)ذوالفقار علي حسينNo ratings yet
- Flutter Symposium 2011Document7 pagesFlutter Symposium 2011gandalf500No ratings yet
- EMTH202-Lecture 13 (20-03-2023)Document25 pagesEMTH202-Lecture 13 (20-03-2023)Naledi KetlogetsweNo ratings yet
- CH 4Document3 pagesCH 4aliNo ratings yet
- CH 8 Structural Dynamic 09Document9 pagesCH 8 Structural Dynamic 09Delyan EryandiNo ratings yet
- Topic 6bDocument4 pagesTopic 6bstefanNo ratings yet
- CHAPTER 2: System Modeling in Frequency DomainDocument98 pagesCHAPTER 2: System Modeling in Frequency DomainSanji KarunaNo ratings yet
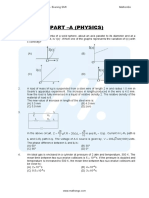
- Part - A (Physics) : Jee Main 2019 - 11 January - Morning Shift MathongoDocument35 pagesPart - A (Physics) : Jee Main 2019 - 11 January - Morning Shift MathongoManya SinghNo ratings yet
- Aieee-2012 Physics SolutionsDocument5 pagesAieee-2012 Physics SolutionsAman Bhutta100% (1)
- Vibration of Continuous SystemsDocument21 pagesVibration of Continuous SystemsHossam T BadranNo ratings yet
- Jest Physics 2018 Paper PDFDocument9 pagesJest Physics 2018 Paper PDFSatyaki ChowdhuryNo ratings yet
- Iit JeeDocument4 pagesIit JeeAvinash BillaNo ratings yet
- .......... ! 3) (! 2) (1 (1 1 Lim 1 1 Lim: Chapter (2) Mathematical BackgroundDocument7 pages.......... ! 3) (! 2) (1 (1 1 Lim 1 1 Lim: Chapter (2) Mathematical Backgroundزياد عبدالله عبدالحميدNo ratings yet
- Iit Jam Physics 2015Document10 pagesIit Jam Physics 2015Subha NayakNo ratings yet
- Allen: Aieee - 2012 Test Paper With Answer (Held On Sunday 29 APRIL, 2012)Document5 pagesAllen: Aieee - 2012 Test Paper With Answer (Held On Sunday 29 APRIL, 2012)rishabhk28995No ratings yet
- Physics Bitsat 2010 Sample Test 3Document6 pagesPhysics Bitsat 2010 Sample Test 3Abhay Kumar NayakNo ratings yet
- Phy 1 PDFDocument15 pagesPhy 1 PDFGarlapati Srinivasa RaoNo ratings yet
- Laterally Loaded PilesDocument25 pagesLaterally Loaded PilesSangharsh KothuleNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Module 6 - Design For Spring, Cams NoteDocument17 pagesModule 6 - Design For Spring, Cams NoteMahmud HassanNo ratings yet
- 16S2 EE3011 Week1.Lecture2Appendix V0.3Document16 pages16S2 EE3011 Week1.Lecture2Appendix V0.3partyoppositeNo ratings yet
- Inpho 2009Document23 pagesInpho 2009Stephan ReynoldsNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Example 198390 16372018092505Document6 pagesExample 198390 16372018092505pattrapong pongpattraNo ratings yet
- Bridge - Example 198390 16372012818569Document60 pagesBridge - Example 198390 16372012818569pattrapong pongpattraNo ratings yet
- Port Structures-198390-16376325723147Document81 pagesPort Structures-198390-16376325723147pattrapong pongpattraNo ratings yet
- RC Columns-198390-16357364023032Document18 pagesRC Columns-198390-16357364023032pattrapong pongpattraNo ratings yet
- Fixity Point-198390-16346098400266Document9 pagesFixity Point-198390-16346098400266pattrapong pongpattraNo ratings yet
- Earthquake Response of Linear Systems: Expected OutcomeDocument30 pagesEarthquake Response of Linear Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Dynamic Analysis and Response of Linear MDF Systems: Expected OutcomeDocument19 pagesDynamic Analysis and Response of Linear MDF Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Presentation2 20 Math.15290.1597313300.6643Document60 pagesPresentation2 20 Math.15290.1597313300.6643pattrapong pongpattraNo ratings yet
- Free Vibration of MDF Systems: Expected OutcomeDocument33 pagesFree Vibration of MDF Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Numerical Evaluation of Dynamic Response: Expected OutcomeDocument21 pagesNumerical Evaluation of Dynamic Response: Expected Outcomepattrapong pongpattraNo ratings yet
- Earthquake Response of Inelastic Systems: Expected OutcomeDocument25 pagesEarthquake Response of Inelastic Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Figure 1.1 Distributed-Mass Models Figure 1.2 Lumped-Mass ModelsDocument13 pagesFigure 1.1 Distributed-Mass Models Figure 1.2 Lumped-Mass Modelspattrapong pongpattraNo ratings yet
- CHAPTER 03-20200827-v8Document28 pagesCHAPTER 03-20200827-v8pattrapong pongpattraNo ratings yet
- Free Vibration of SDF SystemsDocument14 pagesFree Vibration of SDF Systemspattrapong pongpattraNo ratings yet
- Presentation3 20 Stress.15290.1598880173.9246Document37 pagesPresentation3 20 Stress.15290.1598880173.9246pattrapong pongpattraNo ratings yet
- 3 Flexure.6278.1598780738.8088 PDFDocument79 pages3 Flexure.6278.1598780738.8088 PDFpattrapong pongpattraNo ratings yet
- Chapter 2: Materials: 2101804 Behavior of Reinforced Concrete Structures Assist. Prof. Dr. Pitcha JongvivatsakulDocument70 pagesChapter 2: Materials: 2101804 Behavior of Reinforced Concrete Structures Assist. Prof. Dr. Pitcha Jongvivatsakulpattrapong pongpattraNo ratings yet
- Part1 20180910.13500.1596979305.4946 PDFDocument94 pagesPart1 20180910.13500.1596979305.4946 PDFpattrapong pongpattraNo ratings yet
- 1 Intro To Steel Design.14914.1504494667.2341Document27 pages1 Intro To Steel Design.14914.1504494667.2341pattrapong pongpattraNo ratings yet
- A Micro-Project Report On: Prepare A Model On Kirchhoff'S Current Law (KCL) 'Document13 pagesA Micro-Project Report On: Prepare A Model On Kirchhoff'S Current Law (KCL) 'hrishikesh barveNo ratings yet
- MaestroDocument32 pagesMaestrodanielhoseaNo ratings yet
- University Physics With Modern Physics 2nd Edition Bauer Test BankDocument24 pagesUniversity Physics With Modern Physics 2nd Edition Bauer Test BankJustinTaylorepga100% (46)
- Physics II Honors E&M Cheat SheetDocument2 pagesPhysics II Honors E&M Cheat SheetCeline ShawNo ratings yet
- Approximate AnalysisDocument35 pagesApproximate AnalysisSyahir HamidonNo ratings yet
- Corrosion and Compatibility Considerations of Liquid Metals For Fusion Reactor ApplicationDocument12 pagesCorrosion and Compatibility Considerations of Liquid Metals For Fusion Reactor ApplicationMax SmithNo ratings yet
- B 631 KDocument4 pagesB 631 KAndres CamachoiNo ratings yet
- Bridge Engineering - Module 3Document38 pagesBridge Engineering - Module 3Cambay, Mc Berlie Jhoel N.No ratings yet
- Angular Momentum: Reading: Chapter 11 (11-7 To 11-12)Document11 pagesAngular Momentum: Reading: Chapter 11 (11-7 To 11-12)Arafat AnikNo ratings yet
- Waveguides: The Symmetric Slab WaveguideDocument26 pagesWaveguides: The Symmetric Slab WaveguidemstefaneNo ratings yet
- Rice 1788Document70 pagesRice 1788Dr. Rohit SinghNo ratings yet
- 2U Rack Mount Novec 1230 DataSheet 1.5Document5 pages2U Rack Mount Novec 1230 DataSheet 1.5prakistaoNo ratings yet
- Ect161 PDFDocument16 pagesEct161 PDFMinhthien NguyenNo ratings yet
- Units and MeasurementsDocument11 pagesUnits and MeasurementsMohammad EhteramuddinNo ratings yet
- Studies in Plain Bearing Failures - TLT Article - Oct06Document4 pagesStudies in Plain Bearing Failures - TLT Article - Oct06safat parNo ratings yet
- 400KV Lattice Steel Tower Design Requirements and Design Spans For Support Locations PDFDocument7 pages400KV Lattice Steel Tower Design Requirements and Design Spans For Support Locations PDFAnonymous SA1rs3KWNo ratings yet
- AC Induction Motor MC WebinarDocument61 pagesAC Induction Motor MC WebinarAdeNo ratings yet
- Prelim Examination Set A Solutions PDFDocument6 pagesPrelim Examination Set A Solutions PDFOxy GenNo ratings yet
- Ring FoundationDocument4 pagesRing Foundationjorge01100% (2)
- 7394 - 11 - 8 - 08 - INTEGRATED HEAT RECOVERY SYSTEM INSTALLATION L132 To L250Document7 pages7394 - 11 - 8 - 08 - INTEGRATED HEAT RECOVERY SYSTEM INSTALLATION L132 To L250phuongtrinhxuan91_88No ratings yet
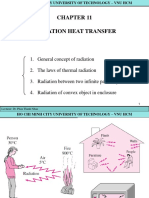
- Chapter 11 - Radiation Heat TransferDocument22 pagesChapter 11 - Radiation Heat TransferBảo Tín TrầnNo ratings yet
- Refresher Module 30 (S21) - Construction Materials Testing and CodesDocument2 pagesRefresher Module 30 (S21) - Construction Materials Testing and CodesJohnMichaelPeraltaNo ratings yet
- Chapter 2 Force and Motion (Answer)Document108 pagesChapter 2 Force and Motion (Answer)Nadia SaidonNo ratings yet
- Moisture Equilibrium CurvesDocument9 pagesMoisture Equilibrium CurvesMundo InfantilNo ratings yet
- Chapter-4 (State Space Representation)Document28 pagesChapter-4 (State Space Representation)Nischal MaharjanNo ratings yet
- Write Answers To All NCERT Intext Solved & Unsolved Problems. 2. Write Answers To All NCERT Questions in ExercisesDocument2 pagesWrite Answers To All NCERT Intext Solved & Unsolved Problems. 2. Write Answers To All NCERT Questions in ExercisesJagriti DaryaniNo ratings yet
- Alfa Laval - Heat Exchanger InstallationDocument66 pagesAlfa Laval - Heat Exchanger InstallationFabricio AlvarezNo ratings yet
- AMATH FunctionDocument11 pagesAMATH FunctionLeneNo ratings yet
- Design of Absorption Column 160127152306Document33 pagesDesign of Absorption Column 160127152306Dũng LêNo ratings yet