Download as pdf or txt
You might also like
- Principles of Polymer Systems 6th Rodriguez Solution ManualDocument14 pagesPrinciples of Polymer Systems 6th Rodriguez Solution ManualOtis Colvin0% (1)
- Boundry Layer Analysis - Chp1Document8 pagesBoundry Layer Analysis - Chp1Seyed AmirMahdi Mirhosseini100% (1)
- Raising Children in IslamDocument40 pagesRaising Children in IslamFaheem Lea100% (1)
- Practice Problems For Instrumentation and MeasurementDocument13 pagesPractice Problems For Instrumentation and MeasurementMark lord bongatNo ratings yet
- Wentworth Solutions Chapter 6 - LTDocument48 pagesWentworth Solutions Chapter 6 - LTCesar JrNo ratings yet
- Solution of Homework#2Document8 pagesSolution of Homework#2丁偉庭No ratings yet
- Columbia Knowledge Management APQC BookDocument77 pagesColumbia Knowledge Management APQC BookRun Ryan Mao100% (2)
- Prayer Service For The DeadDocument16 pagesPrayer Service For The DeadRodel Ramos DaquioagNo ratings yet
- Excel Formulas & FunctionsDocument74 pagesExcel Formulas & FunctionsStefos Pepes100% (1)
- Pyrhonen Squirrel Cage Motor Calculation Mathcad13 PDFDocument35 pagesPyrhonen Squirrel Cage Motor Calculation Mathcad13 PDFluis900000No ratings yet
- Homework Chapter3Document26 pagesHomework Chapter3nxey bonxNo ratings yet
- HW 7 SolutionsDocument8 pagesHW 7 SolutionspeterNo ratings yet
- HW 01 SolutionDocument12 pagesHW 01 Solutionmaulida rahmiNo ratings yet
- Ejercicios Conformado PL Astico, Procesos de Manufactura 1, Enero 12 de 2022 1Document6 pagesEjercicios Conformado PL Astico, Procesos de Manufactura 1, Enero 12 de 2022 1Juan Pablo Jimenez EspinosaNo ratings yet
- De La Salle University Gokongwei College of Engineering Civil Engineering DepartmentDocument10 pagesDe La Salle University Gokongwei College of Engineering Civil Engineering DepartmentMiguel CruzNo ratings yet
- Turbulent Boundary Layer in A 3-Element High-Lift Wing: Coherent Structures IdentificationDocument6 pagesTurbulent Boundary Layer in A 3-Element High-Lift Wing: Coherent Structures IdentificationvetinenNo ratings yet
- CHE 509 - Past Exam QuestionsDocument12 pagesCHE 509 - Past Exam QuestionsJane Eilyza Aballa100% (1)
- PDF Sample Problem1Document34 pagesPDF Sample Problem1ERVIN JAMES ABULOCNo ratings yet
- 20-ME-9 Uzair Akram FM Lab 12Document10 pages20-ME-9 Uzair Akram FM Lab 12uzair akramNo ratings yet
- HW5 Sensing Elements SolutionDocument13 pagesHW5 Sensing Elements SolutionanasalqassmmiNo ratings yet
- Amp 2021-01Document10 pagesAmp 2021-01Renata OsunaNo ratings yet
- Physics 8 LabDocument8 pagesPhysics 8 LabSprout GigsNo ratings yet
- Fracture Mechanics of Concrete Structures Proceedings FRAMCOS-3 AEDIFICA TIO Publishers, D-79104 Freiburg, GermanyDocument10 pagesFracture Mechanics of Concrete Structures Proceedings FRAMCOS-3 AEDIFICA TIO Publishers, D-79104 Freiburg, Germanyno_milk_todayNo ratings yet
- Chapter 3-Lecture 9Document12 pagesChapter 3-Lecture 9Rawan Al MashaikhiNo ratings yet
- Assignment 1 JawapanDocument4 pagesAssignment 1 JawapanSolehah OmarNo ratings yet
- Steam ProblemsDocument3 pagesSteam Problemsosas danNo ratings yet
- Sheet 2Document12 pagesSheet 2Esmail MahmoudNo ratings yet
- Expt No 1 Band Gap of A SemiconductorDocument8 pagesExpt No 1 Band Gap of A SemiconductorNayan ChandakNo ratings yet
- Balok Metode CrossDocument4 pagesBalok Metode CrossEkha Bagus bhakta PurnomoNo ratings yet
- PETE 311 Midterm Exam 3 Key Spring 2023 PDFDocument3 pagesPETE 311 Midterm Exam 3 Key Spring 2023 PDFDrake WellsNo ratings yet
- Manual - Four ProbeDocument6 pagesManual - Four ProbeAashish KushwahaNo ratings yet
- HW 07Document8 pagesHW 07Aeyrul KhairulNo ratings yet
- Fatigue Problems Solution: Max MinDocument12 pagesFatigue Problems Solution: Max MinVenkatNo ratings yet
- Project BEM 92303Document12 pagesProject BEM 92303Jair BoulosNo ratings yet
- Me Test-2Document10 pagesMe Test-2MAYANKNo ratings yet
- Result and Discussion GeoDocument7 pagesResult and Discussion Geoaqmar zulkarnainNo ratings yet
- Pump SizingDocument3 pagesPump SizingTagabo AliNo ratings yet
- FM IiDocument4 pagesFM IisaraNo ratings yet
- ContentDocument11 pagesContentjashwanth kumar58No ratings yet
- Transmission Angle: ME 310 (Mechanics of Machines)Document5 pagesTransmission Angle: ME 310 (Mechanics of Machines)omarNo ratings yet
- Pyrhonen Squirrel Cage Motor Calculation Mathcad13Document35 pagesPyrhonen Squirrel Cage Motor Calculation Mathcad13Mutee Ullah KhanNo ratings yet
- Theory of Vibrations: Assignment-2 (Solutions)Document14 pagesTheory of Vibrations: Assignment-2 (Solutions)Shuvanjan Dahal100% (2)
- Design of SlabsDocument59 pagesDesign of SlabsSam OlarteNo ratings yet
- Final Exam 2023-2024Document10 pagesFinal Exam 2023-2024mswd16166No ratings yet
- ME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW4 SolutionDocument5 pagesME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW4 SolutionNiman DekNo ratings yet
- Department of Electrical and Computer Engineering Course Ecse-361 Power Engineering Assignment #1 SolutionsDocument28 pagesDepartment of Electrical and Computer Engineering Course Ecse-361 Power Engineering Assignment #1 SolutionsShuvojit GhoshNo ratings yet
- Exercises Component Method 2Document57 pagesExercises Component Method 2Vanderleia CalazansNo ratings yet
- Experiment-3 Heat Transfer in Agitated Vessel: Sarthak Lathiya Hto Lab 18BT01035Document10 pagesExperiment-3 Heat Transfer in Agitated Vessel: Sarthak Lathiya Hto Lab 18BT01035SARTHAK LATHIYANo ratings yet
- Solution EE4701 Sp18 T3Document4 pagesSolution EE4701 Sp18 T3al-muntheral-mairikiNo ratings yet
- Constant Strength Beam ChandigarhDocument6 pagesConstant Strength Beam ChandigarhKomborerai MuvhiringiNo ratings yet
- Final Sec MathalinoDocument51 pagesFinal Sec MathalinoShiela GonzalesNo ratings yet
- 2016-17 EEEN211 Assignment 02 With Answers 01Document6 pages2016-17 EEEN211 Assignment 02 With Answers 01Lesedi MokgadiNo ratings yet
- Dynamic Analysis and Design of UG WATER TANK TWOWAYDocument35 pagesDynamic Analysis and Design of UG WATER TANK TWOWAYsaiNo ratings yet
- CVE 154 - Statics of Rigid Bodies: Lesson 4: Roots of Equations - Bracketing MethodsDocument36 pagesCVE 154 - Statics of Rigid Bodies: Lesson 4: Roots of Equations - Bracketing MethodsIce BoxNo ratings yet
- Physiological Monitoring Sheet 3-SolutionDocument7 pagesPhysiological Monitoring Sheet 3-SolutionMaissa HassanNo ratings yet
- Trabajo de Curso #2: Diseño Avanzado de Estructuras de HormigonDocument18 pagesTrabajo de Curso #2: Diseño Avanzado de Estructuras de HormigonCarlos MendezNo ratings yet
- Design Charts Based Methods For The Kinematic Synthesis of Four-Bar Function GeneratorsDocument26 pagesDesign Charts Based Methods For The Kinematic Synthesis of Four-Bar Function GeneratorsAYA OUEZGANNo ratings yet
- Member With Pure Torsion: Example 1Document20 pagesMember With Pure Torsion: Example 1Helen Negash100% (2)
- Hydraulics Department: ObjectiveDocument6 pagesHydraulics Department: ObjectivePaul CamachoNo ratings yet
- Assignment 3 (2006) SolutionsDocument7 pagesAssignment 3 (2006) Solutionsapi-383542133% (3)
- Lab9 G7Document5 pagesLab9 G7tanannudt.srNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Capr II En6282Document42 pagesCapr II En6282mssonuneNo ratings yet
- Last Alaskans Episode GuideDocument1 pageLast Alaskans Episode GuideLisa BarattaNo ratings yet
- K68i PC ManualDocument101 pagesK68i PC ManualjjcanoolivaresNo ratings yet
- Chevron Australia Project Overview - PPTDocument15 pagesChevron Australia Project Overview - PPTzawamaNo ratings yet
- NE20E-S V800R022C00SPC600 Configuration Guide 01 Basic ConfigurationDocument422 pagesNE20E-S V800R022C00SPC600 Configuration Guide 01 Basic ConfigurationMoises HenriqueNo ratings yet
- What Is Guru Chandal YogaDocument7 pagesWhat Is Guru Chandal YogaGarga100% (1)
- Neuromuscular DisordersDocument3 pagesNeuromuscular Disordersapi-321778954No ratings yet
- MNS University of Agriculture Multan: Project Assigned ToDocument13 pagesMNS University of Agriculture Multan: Project Assigned ToRana DilawarNo ratings yet
- Chanteuse in The City: The Realist Singer in FrenchDocument277 pagesChanteuse in The City: The Realist Singer in FrenchspamNo ratings yet
- Teaching ScienceDocument55 pagesTeaching ScienceApril ManjaresNo ratings yet
- 03 - Information PackagesDocument13 pages03 - Information Packagesyusi cantikNo ratings yet
- ITL - Project Report TemplateDocument5 pagesITL - Project Report Templatemossaengginoli0% (1)
- Level 6 Advanced - A Room With A ViewDocument117 pagesLevel 6 Advanced - A Room With A View01.wawiwawi100% (1)
- Critical Thinking Definitions PDFDocument2 pagesCritical Thinking Definitions PDFAlpha Niño S SanguenzaNo ratings yet
- I04 U11 Conditionals & Reported SpeechDocument4 pagesI04 U11 Conditionals & Reported Speechmelgarejo1111No ratings yet
- A Presentation On: "Gswan"Document19 pagesA Presentation On: "Gswan"Sunil PillaiNo ratings yet
- Planes of SymmetryDocument38 pagesPlanes of SymmetryRuchika Chandna83% (6)
- PHD ThesisDocument270 pagesPHD Thesiskamba bryanNo ratings yet
- DLL - Science 6 - Q4 - W7Document10 pagesDLL - Science 6 - Q4 - W7Jefferson Beralde50% (2)
- Padre Island National Seashore Superintendent's StatementDocument7 pagesPadre Island National Seashore Superintendent's StatementcallertimesNo ratings yet
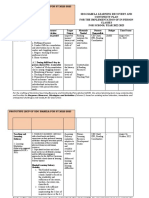
- v2 SDO ISABELA LEARNING RECOVERY PLANDocument16 pagesv2 SDO ISABELA LEARNING RECOVERY PLANRoland Mark DumaliangNo ratings yet
- MB0050 - Research MethodologyDocument8 pagesMB0050 - Research MethodologyAnish NairNo ratings yet
- Current Status, Research Trends, and ChallengesDocument23 pagesCurrent Status, Research Trends, and Challengesqgi-tanyaNo ratings yet
- SAP Proj Builder Previewer PDFDocument24 pagesSAP Proj Builder Previewer PDFPradeep JagirdarNo ratings yet
- Assignment 6 On Python: Simulations: March 6, 2018Document5 pagesAssignment 6 On Python: Simulations: March 6, 2018Vinayak Nishant Gudipaty ee19b129No ratings yet
- Joint Patterns - Retaining WallDocument3 pagesJoint Patterns - Retaining WallFeby Adryan SitorusNo ratings yet