Download as pdf or txt
You might also like
- Service Manual For Ford Tractor Series 2000, 3000, 4000, 5000, 7000, 3400, 3500, 3550, 4400, 4500, 5500, 5550 Vol. 1Document306 pagesService Manual For Ford Tractor Series 2000, 3000, 4000, 5000, 7000, 3400, 3500, 3550, 4400, 4500, 5500, 5550 Vol. 1Taj Deluria75% (12)
- ECS Air SuspensionDocument36 pagesECS Air Suspensionenzo7259100% (3)
- Mercruiser 525 EfiDocument126 pagesMercruiser 525 EfiNicky Jans100% (1)
- A. Cataloge Book MSR AC16Document56 pagesA. Cataloge Book MSR AC16parahu arief100% (1)
- TOPCNC TC55H Instruction ManualDocument21 pagesTOPCNC TC55H Instruction ManualMarc Gavage100% (1)
- Winmax Probe Training: Part Probe Setup and Conversational CalibrationDocument35 pagesWinmax Probe Training: Part Probe Setup and Conversational CalibrationNikolat84No ratings yet
- Easy-Laser Shaft Alignment - Quick Start GuideDocument2 pagesEasy-Laser Shaft Alignment - Quick Start Guidenhagiandk1100% (2)
- P-0263-GB QUICK TIPS Fixturlaser EVO Rev ADocument6 pagesP-0263-GB QUICK TIPS Fixturlaser EVO Rev ACleydson Vieira GomesNo ratings yet
- New Edition FNIRSI-1C15 English Manual.0.2Document23 pagesNew Edition FNIRSI-1C15 English Manual.0.2LêĐứcDũngNo ratings yet
- Egg Analyzer - Height Calibration Procedure ALTURADocument4 pagesEgg Analyzer - Height Calibration Procedure ALTURACOVESANo ratings yet
- How To Survey and Set Out With The Eltar55 Total Station: Tel: 01-4580725 Page 1 of 5 E-MailDocument5 pagesHow To Survey and Set Out With The Eltar55 Total Station: Tel: 01-4580725 Page 1 of 5 E-MailagusNo ratings yet
- Ruide RT-2 User Manual 1908Document18 pagesRuide RT-2 User Manual 1908Ahmed ButtNo ratings yet
- Manual Fixturlaser - Brand of Acoem AbDocument17 pagesManual Fixturlaser - Brand of Acoem AbPaulo Ricardo AlvesNo ratings yet
- XL530 English Version XINLIAOV2Document39 pagesXL530 English Version XINLIAOV2DrSemyon Sel'skiy100% (1)
- Banknote Counting Machine: Technical ManualDocument38 pagesBanknote Counting Machine: Technical Manualandrea giraldoNo ratings yet
- Trimble m3 PDFDocument8 pagesTrimble m3 PDFronalpc85No ratings yet
- ZeissEVO50VariablePressureScanning SEMDocument31 pagesZeissEVO50VariablePressureScanning SEMRANJITH KonduriNo ratings yet
- V7 Metal DetectorDocument4 pagesV7 Metal Detectortimothy omirinNo ratings yet
- Ruide RT-2 User Manual 1908 (A5)Document14 pagesRuide RT-2 User Manual 1908 (A5)Karya Perdana MandiriNo ratings yet
- Zeiss Evo InstructionsDocument6 pagesZeiss Evo InstructionsVidas MakareviciusNo ratings yet
- Auger PHI Training ManualDocument28 pagesAuger PHI Training ManualErh-chen LinNo ratings yet
- Ireless Ntuitive Robing Ystem: Wireless Intuitive Probing System W I P SDocument32 pagesIreless Ntuitive Robing Ystem: Wireless Intuitive Probing System W I P SGuillermo RamirezNo ratings yet
- AFA GuideDocument5 pagesAFA GuideAnish KarthikeyanNo ratings yet
- BluetoothCaliper v2Document17 pagesBluetoothCaliper v2ontoptreeworkerNo ratings yet
- HAAS VF-0 User's Manual: Stanford Product Realization LaboratoryDocument14 pagesHAAS VF-0 User's Manual: Stanford Product Realization LaboratoryrcrdvlscNo ratings yet
- SMTO502sseries ManualDocument19 pagesSMTO502sseries ManualSan BastianNo ratings yet
- Limited: Z Installation InstructionDocument6 pagesLimited: Z Installation Instructionriad harzalNo ratings yet
- Mbt1500 IngDocument4 pagesMbt1500 IngAlexsandro CenteioNo ratings yet
- UTD4000M User Manual V1.01Document103 pagesUTD4000M User Manual V1.01luis lopezNo ratings yet
- Fingerprint and Card Access Control Machine Hardware ManualDocument40 pagesFingerprint and Card Access Control Machine Hardware ManualAdrian SudituNo ratings yet
- Study On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsDocument5 pagesStudy On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsAnonymous 5AmJ13mLkNo ratings yet
- P-0272-GB Fixturlaser Laser Kit Quick Tips Low Re 1Document14 pagesP-0272-GB Fixturlaser Laser Kit Quick Tips Low Re 1Cleydson Vieira GomesNo ratings yet
- Ca770 Manual EngDocument2 pagesCa770 Manual Engeddy_p_ajiNo ratings yet
- Vimble2 Manual en PDFDocument10 pagesVimble2 Manual en PDFAdhi Subagio SuwandiNo ratings yet
- SA110 LW200xxx ServiceanleitungDocument24 pagesSA110 LW200xxx ServiceanleitungKarl-Heinz WellerNo ratings yet
- Load Line 2 Weight Indicator User ManuelDocument55 pagesLoad Line 2 Weight Indicator User Manuelmostafa.othman150No ratings yet
- Manual - 288 - 33 - 91 - 3x-En MailDocument64 pagesManual - 288 - 33 - 91 - 3x-En MailĽuboslav TýrNo ratings yet
- Piston Ring Thickness GaugeDocument29 pagesPiston Ring Thickness Gaugeramdayal bhairaNo ratings yet
- Philips Operation Manual CM200 vs3Document5 pagesPhilips Operation Manual CM200 vs3Ola NordmannsenNo ratings yet
- Almega Positioning System Quick Setup Guide HPV6 - 900 - DTF - KP - Iss5Document4 pagesAlmega Positioning System Quick Setup Guide HPV6 - 900 - DTF - KP - Iss5billNo ratings yet
- U2Document4 pagesU2TouficFereidNo ratings yet
- MT Pro Product Manual en V1.1 July 2022 1Document15 pagesMT Pro Product Manual en V1.1 July 2022 1Renato Ogeda E SouzaNo ratings yet
- LDM 70 ManualDocument4 pagesLDM 70 ManualJoão BatistaNo ratings yet
- UPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideDocument8 pagesUPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideSiles LimberdsNo ratings yet
- I CareDocument12 pagesI Carecapacitacion.biomedicaNo ratings yet
- Termometro A Distanza A Infrarossi Infrared Non-Contact Thermometer Thermomètre À Infrarouges Sans Contact Termómetro Infrarrojo Sin ContactoDocument8 pagesTermometro A Distanza A Infrarossi Infrared Non-Contact Thermometer Thermomètre À Infrarouges Sans Contact Termómetro Infrarrojo Sin ContactogokulrajeNo ratings yet
- Manual BallisticoDocument7 pagesManual BallisticoMarcos César Leandro CostaNo ratings yet
- Ponchadora PDFDocument2 pagesPonchadora PDFmarco antoniomegreteNo ratings yet
- Distanciometro QM1622 - ManualDocument20 pagesDistanciometro QM1622 - ManualGustavoNo ratings yet
- Mcii Nu-FloDocument4 pagesMcii Nu-FloMARIO FABRISNo ratings yet
- ES400 F 21iMB Mag Zero Set 033007Document3 pagesES400 F 21iMB Mag Zero Set 033007Julián MorelosNo ratings yet
- ALC-A Operating ManualDocument6 pagesALC-A Operating ManualThangNo ratings yet
- MT8206 2Document10 pagesMT8206 2RgfNo ratings yet
- Alin.-101-150Document50 pagesAlin.-101-150Edgar MedinaNo ratings yet
- AL 100user Manual ExtractDocument41 pagesAL 100user Manual ExtractTuti Cristina Bastidas100% (1)
- MiBro Watch T1Document20 pagesMiBro Watch T1llawartaNo ratings yet
- System Calibration: 3.1 Calibrating The Roughness SensorDocument3 pagesSystem Calibration: 3.1 Calibrating The Roughness SensorAngel RiveraNo ratings yet
- Ultrasonic Thickness Gauge TM210 PLUS: 1.1 Scope of ApplicationsDocument33 pagesUltrasonic Thickness Gauge TM210 PLUS: 1.1 Scope of Applicationswilk ramonNo ratings yet
- Zba 4 FDocument14 pagesZba 4 Faungp4142No ratings yet
- TFT User ManualDocument9 pagesTFT User ManualKevin SilvaNo ratings yet
- Tri Axis DiesDocument5 pagesTri Axis DiesRawendrraw KuriNo ratings yet
- Toner filling machine: 机型( MODEL):WQ-TG11Document9 pagesToner filling machine: 机型( MODEL):WQ-TG11Alejandro Arteaga JuradoNo ratings yet
- Fujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandFujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- Canon EOS R6: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandCanon EOS R6: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- CBHD 3Document2 pagesCBHD 3parahu ariefNo ratings yet
- 4TNV88Document30 pages4TNV88parahu ariefNo ratings yet
- CATALOGUEDocument27 pagesCATALOGUEparahu ariefNo ratings yet
- Data Book: Akebono Report 2018Document11 pagesData Book: Akebono Report 2018parahu ariefNo ratings yet
- Batery 3Document1 pageBatery 3parahu ariefNo ratings yet
- Fuel Filter Ve TypeDocument2 pagesFuel Filter Ve Typeparahu ariefNo ratings yet
- BT Drive WheelDocument1 pageBT Drive Wheelparahu ariefNo ratings yet
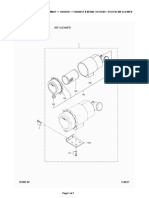
- 01-61-02 AIR CLEANER Dp25N 98727-06200 Cat Chassis and Mast Chassis Exhaust & Intake System 01-61-02 Air CleanerDocument2 pages01-61-02 AIR CLEANER Dp25N 98727-06200 Cat Chassis and Mast Chassis Exhaust & Intake System 01-61-02 Air Cleanerparahu ariefNo ratings yet
- FMP Prospekt PB-XFC EnglishDocument8 pagesFMP Prospekt PB-XFC Englishparahu ariefNo ratings yet
- Shell Anderol BP Mobil Phillips Piston Engine OilsDocument1 pageShell Anderol BP Mobil Phillips Piston Engine Oilsparahu ariefNo ratings yet
- Fedex Rates Zi en Id 2022Document2 pagesFedex Rates Zi en Id 2022parahu ariefNo ratings yet
- Ceil - All Traction BatteryDocument4 pagesCeil - All Traction Batteryparahu ariefNo ratings yet
- TyresDocument95 pagesTyresparahu ariefNo ratings yet
- (1311e12a) Bolt Bl100 Unlock Stock Firmware (Official APK) 2019 - Updated 31 December 2021Document2 pages(1311e12a) Bolt Bl100 Unlock Stock Firmware (Official APK) 2019 - Updated 31 December 2021parahu ariefNo ratings yet
- Caterpillar Forklift Fault CodesDocument4 pagesCaterpillar Forklift Fault Codesparahu arief100% (1)
- YuanSong Catalog 2021 (NewDocument381 pagesYuanSong Catalog 2021 (Newparahu arief100% (2)
- Traffic Cont. Traffic Survey & O.& D SurveyDocument36 pagesTraffic Cont. Traffic Survey & O.& D SurveyfaisalNo ratings yet
- Catalog de Prezentare Jante de Aliaj IrmscherDocument16 pagesCatalog de Prezentare Jante de Aliaj IrmscherApopii CatalinNo ratings yet
- Vio55-6a Parts ManualDocument303 pagesVio55-6a Parts ManualJason Serwa100% (1)
- RAPTOR 55-2R (English) - REV. 200706Document5 pagesRAPTOR 55-2R (English) - REV. 200706helderlpNo ratings yet
- Multiple Choices t5-t6Document8 pagesMultiple Choices t5-t6Bach Hua HuaNo ratings yet
- FJNHPH: Passenger DetailsDocument1 pageFJNHPH: Passenger DetailsWONDERLAND CLEARANCENo ratings yet
- Mr. HabtemariyamDocument69 pagesMr. HabtemariyamHailu HailuNo ratings yet
- 54 Transportation Battalion Unit CrestDocument34 pages54 Transportation Battalion Unit Crestskeptic9No ratings yet
- Marine InsuranceDocument3 pagesMarine InsuranceKirtishbose ChowdhuryNo ratings yet
- M4002432211d102a2 - 2528CH 281 300Document20 pagesM4002432211d102a2 - 2528CH 281 300NaimahSulistianingsihNo ratings yet
- Paris MoU - Overview of Deficiency Codes - 01 July 2021Document13 pagesParis MoU - Overview of Deficiency Codes - 01 July 2021Majelle PradoNo ratings yet
- DLMProgramsDocument3 pagesDLMProgramsFelix Kuami QuarshieNo ratings yet
- CF1 CF1: Building Materials $ Construction Techniques Stuti Sharma B.Arch 3Rd YearDocument1 pageCF1 CF1: Building Materials $ Construction Techniques Stuti Sharma B.Arch 3Rd YearstutiNo ratings yet
- Quick Reference Guide For Saf CBX Series Air Suspensions: Collectible Number 5Document6 pagesQuick Reference Guide For Saf CBX Series Air Suspensions: Collectible Number 5Citlally juarezNo ratings yet
- Airline Industry Irland CaseDocument8 pagesAirline Industry Irland Casecolorful anaNo ratings yet
- DaimlerDocument21 pagesDaimlerMojiz AbbasNo ratings yet
- ZF 6HP - Diagnosis For EGS FC 4F81Document3 pagesZF 6HP - Diagnosis For EGS FC 4F81DomingoLunaNo ratings yet
- Determinants of Urban Form VENICEDocument7 pagesDeterminants of Urban Form VENICEjashndeep100% (1)
- Impact of Rains On Road Transport: IJEDR1804018 97Document4 pagesImpact of Rains On Road Transport: IJEDR1804018 97Zeeshan ShaikhNo ratings yet
- CT 125X BS VI UG OBD2 Rev02 Apr 239f32950cDocument89 pagesCT 125X BS VI UG OBD2 Rev02 Apr 239f32950cAltaf Khan K100% (2)
- Rolling Mill Shutdown Work ReportDocument3 pagesRolling Mill Shutdown Work Reportravi kumarNo ratings yet
- Two Wheeler EbrochureDocument16 pagesTwo Wheeler EbrochurePankaj BadyalNo ratings yet
- Sonar Transducer - Selection - Guide GT 21-TMDocument19 pagesSonar Transducer - Selection - Guide GT 21-TMRDNo ratings yet
- Car MaintanenceDocument2 pagesCar MaintanenceNirmala AllamNo ratings yet
- AXIS200 /: Operating Instructions Laser Wheel AlignerDocument52 pagesAXIS200 /: Operating Instructions Laser Wheel AlignerOk PalaceNo ratings yet
- Yearly Sales and Ticket Issues - Airline: BSP - LebanonDocument64 pagesYearly Sales and Ticket Issues - Airline: BSP - Lebanonadnan altawilyNo ratings yet
- A Civ Spe 000 30002 1Document30 pagesA Civ Spe 000 30002 1ZaidiNo ratings yet