Download as pdf or txt
You might also like
- Instant Download Ebook PDF Electromagnetics 2nd Edition by Arlon T Adams PDF ScribdDocument41 pagesInstant Download Ebook PDF Electromagnetics 2nd Edition by Arlon T Adams PDF Scribdsean.cunningham518100% (50)
- Electrical Engineering Technology: Cambrian CollegeDocument12 pagesElectrical Engineering Technology: Cambrian CollegeGabrielGrecoNo ratings yet
- Test#3 INT 3505-2122Document16 pagesTest#3 INT 3505-2122GabrielGrecoNo ratings yet
- Mathematics Form Two Yearly Lesson PlanDocument10 pagesMathematics Form Two Yearly Lesson PlanAbdul Rahman Narawi67% (3)
- Group 4 - Section 03 - Experiment 4Document22 pagesGroup 4 - Section 03 - Experiment 4PRITHASHNI LETCHUMANANNo ratings yet
- Bkf3791 Pci Lab - Group 2 - Experiment 4Document21 pagesBkf3791 Pci Lab - Group 2 - Experiment 4Lee Jian RongNo ratings yet
- Exp4-Result & DiscussionDocument23 pagesExp4-Result & DiscussionKelvin Wong Jing ZhiNo ratings yet
- Experiment 4 Study On Dynamics of First Order and Second OrderDocument12 pagesExperiment 4 Study On Dynamics of First Order and Second OrderQastalani Ghazali100% (1)
- Methodology Part A: System Identification ProblemDocument2 pagesMethodology Part A: System Identification ProblemTan Yong ChaiNo ratings yet
- Module 4 Lab ReportDocument26 pagesModule 4 Lab ReportPRITHASHNI LETCHUMANANNo ratings yet
- Delta Iabg C en 20200813 WebDocument16 pagesDelta Iabg C en 20200813 WebzakiNo ratings yet
- Control System Labsheet Exp4Document8 pagesControl System Labsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- CS LabReport 3Document10 pagesCS LabReport 3Muhammad AfzaalNo ratings yet
- Lab 4 Performance Measures of The First and Second Order SystemsDocument9 pagesLab 4 Performance Measures of The First and Second Order SystemsMuhammad AbbasiNo ratings yet
- Lab 5Document9 pagesLab 5zinilNo ratings yet
- No Late Submissions Will Be AcceptedDocument2 pagesNo Late Submissions Will Be AcceptednctgayarangaNo ratings yet
- Mannual 2020-21Document89 pagesMannual 2020-21MAMILLAPALLI VARA LAKSHMI NIT APNo ratings yet
- 1) 1 Order Systems Parameter Changes (K and A)Document9 pages1) 1 Order Systems Parameter Changes (K and A)Ali El-GazzarNo ratings yet
- Control SystemDocument11 pagesControl SystemMuhammadNaveedNo ratings yet
- Experiment 3Document7 pagesExperiment 3Usama NadeemNo ratings yet
- EE131 Comprehensive Exam 2nd Sem 2019-2020 - BaronDocument11 pagesEE131 Comprehensive Exam 2nd Sem 2019-2020 - BaronRosendo J. BaronNo ratings yet
- GRT Institute of Engineering and Technology,: P.I.D.T.Bala Durai Kannan, Ap / Eee, GRT IetDocument12 pagesGRT Institute of Engineering and Technology,: P.I.D.T.Bala Durai Kannan, Ap / Eee, GRT IetDharani KumarNo ratings yet
- Lab 3 - 4 ScilabDocument8 pagesLab 3 - 4 ScilabIq'wan RodzaiNo ratings yet
- TE 2019 MechatronicsDocument6 pagesTE 2019 MechatronicsVishalNo ratings yet
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessDocument13 pagesUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaNo ratings yet
- Expt. No: Date: Digital Simulation of Second Order Systems AimDocument3 pagesExpt. No: Date: Digital Simulation of Second Order Systems AimMariGaneshNo ratings yet
- Performance Assessment of A Radiant Tube Furnace's Control SystemDocument5 pagesPerformance Assessment of A Radiant Tube Furnace's Control SystemFabián José Manrique MorelosNo ratings yet
- PID ControllerDocument44 pagesPID ControllerJasper SeeNo ratings yet
- Assignment 1,2&3Document3 pagesAssignment 1,2&3tarun_vemulakondaNo ratings yet
- Assessment Report: ObjectiveDocument12 pagesAssessment Report: Objectivef158354 Muhammad HaseebNo ratings yet
- Lab 4Document4 pagesLab 4Vu LeNo ratings yet
- Assessment Brief LabDocument5 pagesAssessment Brief LabChaztan RajNo ratings yet
- Matlab Exp 7Document9 pagesMatlab Exp 7Mohd RehanNo ratings yet
- Lab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer SpeedDocument11 pagesLab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer Speedsairafi100% (3)
- Probably The Best Simple PID Tuning Rules in The WorldDocument12 pagesProbably The Best Simple PID Tuning Rules in The WorldKarthi KarthyNo ratings yet
- AzimuthDocument14 pagesAzimuthMohd Shafiq AzniNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- Control System Engineering ©dept. of Ete, CuetDocument12 pagesControl System Engineering ©dept. of Ete, Cuetu2008003No ratings yet
- Control Systems U2 (TEL306)Document80 pagesControl Systems U2 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument15 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Lab 4Document8 pagesLab 4Mohd FazliNo ratings yet
- Presented: 1. Alaa Mohammed Azeem 2 - Amna Khalafalla Mohammed 3. Amera Jubara Mohammed 4. Maha Alshiekh AhmedDocument33 pagesPresented: 1. Alaa Mohammed Azeem 2 - Amna Khalafalla Mohammed 3. Amera Jubara Mohammed 4. Maha Alshiekh AhmedelneelNo ratings yet
- Tuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachDocument10 pagesTuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachMaria DelgadoNo ratings yet
- U U (UIU) : Expt. No. 4Document7 pagesU U (UIU) : Expt. No. 4Maksud SarkerNo ratings yet
- Lab02 WorksheetDocument4 pagesLab02 WorksheetSpin FotonioNo ratings yet
- Control Lab ReportDocument20 pagesControl Lab ReportRavi SainiNo ratings yet
- Temperature Control Lab CHBE 356: Group KDocument13 pagesTemperature Control Lab CHBE 356: Group KPorkkodi SugumaranNo ratings yet
- EE131 Comprehensive Exam 2nd Sem 2019-2020Document10 pagesEE131 Comprehensive Exam 2nd Sem 2019-2020Rosendo J. BaronNo ratings yet
- Experiment 2 Performance of First Order and Second Order SystemsDocument6 pagesExperiment 2 Performance of First Order and Second Order SystemsLana JalalNo ratings yet
- Bytronic SistemDocument6 pagesBytronic SistemSedat IriçNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Lab 4 KaranDocument7 pagesLab 4 KaranSamyak DhutaleNo ratings yet
- Cycle1 ManualDocument24 pagesCycle1 ManualSanthosh krishna. UNo ratings yet
- Lab Experiment # 05: ObjectiveDocument7 pagesLab Experiment # 05: ObjectiveMuhammad Samee baigNo ratings yet
- Lab Assignment _4_second order responseDocument7 pagesLab Assignment _4_second order responsevenkatdurga1962004No ratings yet
- Control System Lab: Practical ManualDocument6 pagesControl System Lab: Practical ManualVats AlokNo ratings yet
- Topic 1 Design of Feedback Controllerstce5102Document11 pagesTopic 1 Design of Feedback Controllerstce5102Fadzai FunguraNo ratings yet
- ChE 4110 Process Control HW 2Document15 pagesChE 4110 Process Control HW 2MalloryNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Air PollutionDocument97 pagesAir PollutionPMNo ratings yet
- CHAPTER 1 Engineered Water TreatmentDocument140 pagesCHAPTER 1 Engineered Water TreatmentPMNo ratings yet
- Experiment 3: Measurement and Control of Air Flow System ObjectiveDocument4 pagesExperiment 3: Measurement and Control of Air Flow System ObjectivePMNo ratings yet
- Chapter 1Document90 pagesChapter 1PMNo ratings yet
- CHAPTER 2 - Wastewater Treatment 2Document145 pagesCHAPTER 2 - Wastewater Treatment 2PMNo ratings yet
- Chapter 1 Sem 1920Document60 pagesChapter 1 Sem 1920PMNo ratings yet
- Experiment 5: Single Loop Pid Level Controller: Process Control & Instrumentation Laboratory BKF3791Document2 pagesExperiment 5: Single Loop Pid Level Controller: Process Control & Instrumentation Laboratory BKF3791PMNo ratings yet
- Experiment 6: Gas Pressure Control Using Pid Controller ObjectivesDocument5 pagesExperiment 6: Gas Pressure Control Using Pid Controller ObjectivesPMNo ratings yet
- Experiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessDocument6 pagesExperiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessPMNo ratings yet
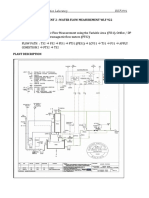
- Experiment 2: Water Flow Measurement WLF 922 Objectives: Process Control & Instrumentation Laboratory BKF3791Document5 pagesExperiment 2: Water Flow Measurement WLF 922 Objectives: Process Control & Instrumentation Laboratory BKF3791PMNo ratings yet
- BKF3553 Process Simulation & Computer Aided Design Sem II 2019/2020Document41 pagesBKF3553 Process Simulation & Computer Aided Design Sem II 2019/2020PMNo ratings yet
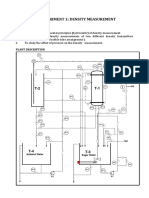
- Experiment 1: Density Measurement: ObjectivesDocument6 pagesExperiment 1: Density Measurement: ObjectivesPMNo ratings yet
- Module 01 BRDocument5 pagesModule 01 BRPMNo ratings yet
- Chapter 1Document74 pagesChapter 1PMNo ratings yet
- Tutorial Solid Liquid Extraction - Leaching 2019Document9 pagesTutorial Solid Liquid Extraction - Leaching 2019PMNo ratings yet
- Techno Lesson 4Document17 pagesTechno Lesson 4PMNo ratings yet
- Chapter 6 DryingDocument34 pagesChapter 6 DryingPMNo ratings yet
- Mini Project - Literature Review: Individual TaskDocument4 pagesMini Project - Literature Review: Individual TaskPMNo ratings yet
- Cre IiDocument2 pagesCre IiPMNo ratings yet
- Techno Lesson 3Document13 pagesTechno Lesson 3PMNo ratings yet
- Student Course Catalog: Center For Academic Innovation & Competitiveness (CAIC) Universiti Malaysia PahangDocument253 pagesStudent Course Catalog: Center For Academic Innovation & Competitiveness (CAIC) Universiti Malaysia PahangPMNo ratings yet
- Design EquationDocument35 pagesDesign EquationPMNo ratings yet
- CS502 Solved Subjective For Final TermDocument19 pagesCS502 Solved Subjective For Final TermFATIMA AMJADNo ratings yet
- GLSL Specification 1.40.08.fullDocument111 pagesGLSL Specification 1.40.08.fullmushakkNo ratings yet
- Math 218 Syllabus Fall 2013Document2 pagesMath 218 Syllabus Fall 2013Malek El JubeilyNo ratings yet
- Lecture 5 - AEP: Nguyễn Phương TháiDocument20 pagesLecture 5 - AEP: Nguyễn Phương TháiDuong PhamNo ratings yet
- Deq11 Final SolDocument3 pagesDeq11 Final Sol陳浚維No ratings yet
- MATHEMATICS Extended Part Module 2 (Algebra and Calculus) : 2013-DSE Maths EpDocument8 pagesMATHEMATICS Extended Part Module 2 (Algebra and Calculus) : 2013-DSE Maths EpKingsley HoNo ratings yet
- Combat Model SolutionDocument2 pagesCombat Model SolutionROCANo ratings yet
- Plate Buckling Example - 1 Plate Buckling Example - 1Document10 pagesPlate Buckling Example - 1 Plate Buckling Example - 1sheikh jamilNo ratings yet
- LN4 DiagonalizationDocument3 pagesLN4 DiagonalizationNikhilesh PrabhakarNo ratings yet
- June 2003 CalcDocument20 pagesJune 2003 CalcMansur CanNo ratings yet
- The Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial ForcesDocument73 pagesThe Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial Forcessohail ahmedNo ratings yet
- Chapters 8 & 9 First-Order Logic: Dr. Daisy TangDocument76 pagesChapters 8 & 9 First-Order Logic: Dr. Daisy TangNishanth NishNo ratings yet
- Chapter 1 - Number System & CodesDocument8 pagesChapter 1 - Number System & CodesIzzat Nadzri100% (2)
- Syllabus MCA-AIDocument2 pagesSyllabus MCA-AIDULAL SAMANTANo ratings yet
- Cmimc 2017 ADocument2 pagesCmimc 2017 AGulit Radian WiyarnoNo ratings yet
- Unit 05 - 08Document39 pagesUnit 05 - 08Nigussie WenNo ratings yet
- NCERT Solutions For Class 7 Maths Chapter 12 Algebraic ExpressionsDocument32 pagesNCERT Solutions For Class 7 Maths Chapter 12 Algebraic ExpressionsEkam KaurNo ratings yet
- MCQs 10 SLOVEDDocument7 pagesMCQs 10 SLOVEDMuhammadTariqKhanNo ratings yet
- Assembly Line BalancingDocument17 pagesAssembly Line BalancingHarshad_S50% (2)
- MMW Reflective EssayDocument2 pagesMMW Reflective EssayAldnoah GrayNo ratings yet
- Numerica Analysis 1Document44 pagesNumerica Analysis 1Kiio MakauNo ratings yet
- TRANSFORMATIONSDocument20 pagesTRANSFORMATIONSSahana PotatoNo ratings yet
- Solving Inverse Non-Linear Fractional deDocument10 pagesSolving Inverse Non-Linear Fractional deAtif AvdovićNo ratings yet
- Quantum 2024 Test 1 Masa PDFDocument1 pageQuantum 2024 Test 1 Masa PDFBonaventure MasekoNo ratings yet
- Summer Math Packet For Students Having Completed 7Th Grade MathDocument17 pagesSummer Math Packet For Students Having Completed 7Th Grade MathMjackson11No ratings yet
- Number Theory A (Very) Short CourseDocument42 pagesNumber Theory A (Very) Short Coursesudha24_7No ratings yet
- Engr302 - Lecture 2 - Coulombs - LawDocument23 pagesEngr302 - Lecture 2 - Coulombs - LawHasanNo ratings yet
- Houdini Attributes: Surface Operator (SOP) Local VariablesDocument20 pagesHoudini Attributes: Surface Operator (SOP) Local VariablesJulio AndresNo ratings yet