Download as pdf or txt
You might also like
- NSCP Section 208: Earthquake LoadsDocument6 pagesNSCP Section 208: Earthquake LoadsGloremay Ann Aleman100% (1)
- 78 Loss of Excitation SIEMENS PaperDocument10 pages78 Loss of Excitation SIEMENS PapermohamedseragNo ratings yet
- Chp11 p36 52Document17 pagesChp11 p36 52Muhammad Izzat100% (1)
- Modelling of Torque PDFDocument102 pagesModelling of Torque PDFMahmoud Ahmed Ali Abdelrazik100% (1)
- PS2 Equation Sheet ExamsDocument4 pagesPS2 Equation Sheet ExamsWilliam ShenNo ratings yet
- Contoh PdaDocument48 pagesContoh PdaMS TazakkaNo ratings yet
- PSP Exam FormularDocument2 pagesPSP Exam FormularYagoNo ratings yet
- Avionics Basic Formulas, Symbols - DefinitionsDocument20 pagesAvionics Basic Formulas, Symbols - DefinitionsDONG BUINo ratings yet
- Topic 1: Forces On Materials: Types of LoadDocument8 pagesTopic 1: Forces On Materials: Types of LoadAdi SafwanNo ratings yet
- Tutorial5 Controller Design Pole Placement SolDocument13 pagesTutorial5 Controller Design Pole Placement SolAnkur MondalNo ratings yet
- 2 - Weighted Residual Methods - Annotated Notes 2021Document12 pages2 - Weighted Residual Methods - Annotated Notes 2021Luay AlmniniNo ratings yet
- Stress Elements: Hamrock - Fundamentals of MachineelementsDocument20 pagesStress Elements: Hamrock - Fundamentals of Machineelementsmohmmad saadNo ratings yet
- Physics Xi (Formulae - 1) : Chapter No 2Document1 pagePhysics Xi (Formulae - 1) : Chapter No 2Meer UmarNo ratings yet
- PushFlow NoAnswers 9upDocument1 pagePushFlow NoAnswers 9upkgrhoadsNo ratings yet
- Eecs 4214Document40 pagesEecs 4214Samyak JainNo ratings yet
- RLC Circuits As Filters: 1 Circuits With Resistors and Capacitors (Continued)Document4 pagesRLC Circuits As Filters: 1 Circuits With Resistors and Capacitors (Continued)sarim rizviNo ratings yet
- RECTIFIER Ac Voltage Controller DIFFERENT LOADSDocument37 pagesRECTIFIER Ac Voltage Controller DIFFERENT LOADSBhavani BhagyasreeNo ratings yet
- 제04주차 Chapter12 정전액츄에이터Document15 pages제04주차 Chapter12 정전액츄에이터K SiriusNo ratings yet
- Lecture 03Document33 pagesLecture 03AB 26No ratings yet
- Displacement Surface CartesianDocument3 pagesDisplacement Surface CartesianPaul CNo ratings yet
- ME 302 Inroduction To Vibrations and Modeling Notes - Part - 1 - Spring 2024Document22 pagesME 302 Inroduction To Vibrations and Modeling Notes - Part - 1 - Spring 2024Ali Osman AydemirNo ratings yet
- The Inverse of ImpedanceDocument1 pageThe Inverse of Impedancekayem14No ratings yet
- Week 10 Fluid Static Part BDocument5 pagesWeek 10 Fluid Static Part B陆昌玉No ratings yet
- EE 419 BEE Lec Module 8Document3 pagesEE 419 BEE Lec Module 8Jhun Lucky SadsadNo ratings yet
- MomentumDocument10 pagesMomentumdinurjNo ratings yet
- Graphical Relationships AS and A2 PhysicsDocument11 pagesGraphical Relationships AS and A2 Physicszxjvcnt699No ratings yet
- Resumo - Circuitos CADocument2 pagesResumo - Circuitos CAisadora nantes dos santosNo ratings yet
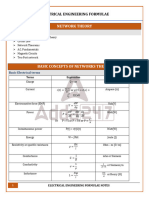
- Electrical Formula NotesDocument100 pagesElectrical Formula NotesMohit SharmaNo ratings yet
- TransformerDocument42 pagesTransformerrecovery gmailNo ratings yet
- Physics EquationsDocument11 pagesPhysics EquationsMevin RamdooNo ratings yet
- 9203 2 INS InternationalPhysics G 16nov20!07!00 GMTDocument4 pages9203 2 INS InternationalPhysics G 16nov20!07!00 GMT王涛No ratings yet
- Form 4 Physics Sir Hazeeq 05.02.2024 - Ameerul HazeeqDocument31 pagesForm 4 Physics Sir Hazeeq 05.02.2024 - Ameerul HazeeqALEXNo ratings yet
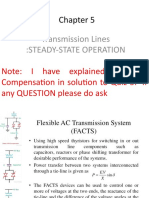
- 2020 - Chapter-5 Loss Less Lines - ON LINE - A - 2 - No AudioDocument28 pages2020 - Chapter-5 Loss Less Lines - ON LINE - A - 2 - No AudioSherry KhanNo ratings yet
- Permittivity in Free Space (Shift Constant 1 4) Permeability in Free Space (Shift Constant 1 5)Document10 pagesPermittivity in Free Space (Shift Constant 1 4) Permeability in Free Space (Shift Constant 1 5)Jizelle JumaquioNo ratings yet
- Dynamical Analogies OR Thermodynamics Without EntropyDocument10 pagesDynamical Analogies OR Thermodynamics Without Entropykgrhoads100% (1)
- Physics Equation Sheet AQA 2023Document2 pagesPhysics Equation Sheet AQA 2023HazzaYT HicksNo ratings yet
- 160.8.6 Virtual Work For BeamsDocument16 pages160.8.6 Virtual Work For BeamsAge MaradiagaNo ratings yet
- Magnetic Circuits - L2Document10 pagesMagnetic Circuits - L2dhruveshbhure9999No ratings yet
- Weldment Strenght CalculationDocument48 pagesWeldment Strenght CalculationHary adiNo ratings yet
- Aqa 8403 Es Jun13Document4 pagesAqa 8403 Es Jun13dadajee420No ratings yet
- Strength of Materials Final PDFDocument11 pagesStrength of Materials Final PDFKeith Elysah Monoy EspinaNo ratings yet
- Design Optimization (ME41613) + Engineering Design Optimization (ME60079)Document16 pagesDesign Optimization (ME41613) + Engineering Design Optimization (ME60079)HarishNandanNo ratings yet
- Significance of Electromincal Relay TypeDocument2 pagesSignificance of Electromincal Relay TypeKunjan DalwadiNo ratings yet
- F τ F F θ θ˙ F (,) X X˙ τ: ext ext e d d dthrDocument1 pageF τ F F θ θ˙ F (,) X X˙ τ: ext ext e d d dthrJuan de DiosNo ratings yet
- Es205 Week07Document11 pagesEs205 Week07Dan SeraNo ratings yet
- 04.0 PP Xi Xiv NotationDocument4 pages04.0 PP Xi Xiv NotationGerry RyanNo ratings yet
- MEC641 AssignmentDocument4 pagesMEC641 AssignmentAini AshikinNo ratings yet
- Of Rolling: AnalysisDocument2 pagesOf Rolling: AnalysisBaginda HamzahNo ratings yet
- Modeling of Basic SystemsDocument46 pagesModeling of Basic SystemsAbhinav ReddyNo ratings yet
- AFM - 10,12 NovDocument12 pagesAFM - 10,12 Novswetapriya97No ratings yet
- Module 9Document11 pagesModule 9Zac IriberriNo ratings yet
- Forced Response (Steady State) - Sinusoidal Source Persists Indefinitely Natural Response-Decays Rapidly To ZeroDocument2 pagesForced Response (Steady State) - Sinusoidal Source Persists Indefinitely Natural Response-Decays Rapidly To ZeroDalwinNo ratings yet
- MAE2404 Exam Sem2 2017 Aide MemoireDocument4 pagesMAE2404 Exam Sem2 2017 Aide MemoireTowenlandNo ratings yet
- Fluid StaticsDocument12 pagesFluid Statics김동영 (김동영)No ratings yet
- EN1014 - Handout 16Document5 pagesEN1014 - Handout 16Rajitha NiroshanNo ratings yet
- Form 4 Physics Sir Hazeeq 05.02.2024 - Ameerul HazeeqDocument21 pagesForm 4 Physics Sir Hazeeq 05.02.2024 - Ameerul HazeeqPubg rafiqNo ratings yet
- Assignment 02 06 October 2020: Problem 1. Easy Problem 2. HardDocument1 pageAssignment 02 06 October 2020: Problem 1. Easy Problem 2. HardMelon GubberNo ratings yet
- TopicsDocument4 pagesTopicsBHAVESH JOSHINo ratings yet
- Engineering College, Ajmer: Department of Mechanical EngineeringDocument12 pagesEngineering College, Ajmer: Department of Mechanical EngineeringBHAVESH JOSHINo ratings yet
- SciSoup - Blog - Research InternshipsDocument30 pagesSciSoup - Blog - Research InternshipsBHAVESH JOSHINo ratings yet
- Fluids: Genetic Algorithm Based Optimization of Wing Rotation in HoverDocument18 pagesFluids: Genetic Algorithm Based Optimization of Wing Rotation in HoverBHAVESH JOSHINo ratings yet
- Aseri G00 G01 CodesDocument2 pagesAseri G00 G01 CodesBHAVESH JOSHINo ratings yet
- Sensors: Modular Approach For Odometry Localization Method For Vehicles With Increased ManeuverabilityDocument26 pagesSensors: Modular Approach For Odometry Localization Method For Vehicles With Increased ManeuverabilityBHAVESH JOSHINo ratings yet
- Robotics For 3D Printing - Links - Day1 - Day2Document2 pagesRobotics For 3D Printing - Links - Day1 - Day2BHAVESH JOSHINo ratings yet
- VI Sem Time TableDocument1 pageVI Sem Time TableBHAVESH JOSHINo ratings yet
- VI Sem Time TableDocument1 pageVI Sem Time TableBHAVESH JOSHINo ratings yet
- Team 21 - SAE Aero Design Micro Class: Objective Assembled Prototype Design AnalysisDocument1 pageTeam 21 - SAE Aero Design Micro Class: Objective Assembled Prototype Design AnalysisBHAVESH JOSHINo ratings yet
- Axisymmetric DiffuserDocument13 pagesAxisymmetric DiffuserBHAVESH JOSHINo ratings yet
- Virtual Work: Work Done by A ForceDocument30 pagesVirtual Work: Work Done by A ForceBHAVESH JOSHI100% (3)
- Join Indian ArmyDocument9 pagesJoin Indian ArmyBHAVESH JOSHINo ratings yet
- FlywheelDocument12 pagesFlywheelBHAVESH JOSHINo ratings yet
- Guidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesDocument13 pagesGuidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesBHAVESH JOSHINo ratings yet
- Piston: Jump To Navigationjump To SearchDocument37 pagesPiston: Jump To Navigationjump To SearchBHAVESH JOSHINo ratings yet
- Distinguish Between Crater Wear and Flank Wear of A Single Point Cutting ToolDocument2 pagesDistinguish Between Crater Wear and Flank Wear of A Single Point Cutting ToolBHAVESH JOSHINo ratings yet
- Premium FREE Resume Templates: DocumentationDocument1 pagePremium FREE Resume Templates: DocumentationBHAVESH JOSHINo ratings yet
- L-6 Multiple Regression AnalysisDocument13 pagesL-6 Multiple Regression AnalysisBHAVESH JOSHINo ratings yet
- Friction WeldingDocument25 pagesFriction WeldingBHAVESH JOSHI0% (1)
- A Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentDocument17 pagesA Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentBHAVESH JOSHINo ratings yet
- Engine BlockDocument19 pagesEngine BlockBHAVESH JOSHINo ratings yet
- PDF Download Websites: - O Kupdf O Academia o Scribd O PDF Drive O Epdf O Twirpix O Engineering Books PDF O Easy Engineering oDocument1 pagePDF Download Websites: - O Kupdf O Academia o Scribd O PDF Drive O Epdf O Twirpix O Engineering Books PDF O Easy Engineering oBHAVESH JOSHINo ratings yet
- Four LinkDocument19 pagesFour LinkBHAVESH JOSHINo ratings yet
- Glossary of ForgingDocument46 pagesGlossary of ForgingBHAVESH JOSHINo ratings yet
- Torq Q and ADocument1 pageTorq Q and ABHAVESH JOSHINo ratings yet
- 04 Setting of REL 511Document53 pages04 Setting of REL 511Acil AbderahmeneNo ratings yet
- JEE Main, JEE Advanced, CBSE, NEET, IIT, Free Study Packages, Test Papers, Counselling, Ask Experts - Studyadda - Com3Document3 pagesJEE Main, JEE Advanced, CBSE, NEET, IIT, Free Study Packages, Test Papers, Counselling, Ask Experts - Studyadda - Com3Raja JhaNo ratings yet
- Contactor by EE Controls PDFDocument10 pagesContactor by EE Controls PDFPaul MendozaNo ratings yet
- Seat Work 11Document6 pagesSeat Work 11isidore frescoNo ratings yet
- Mechanical Engineering Tools, Manufacturing Tools, Design and Manufacturing Calculators Design Reference, GD&T Training Resources - Engineers EdgeDocument6 pagesMechanical Engineering Tools, Manufacturing Tools, Design and Manufacturing Calculators Design Reference, GD&T Training Resources - Engineers Edgejohn reyesNo ratings yet
- 4 Newton's Law and ApplicationsDocument23 pages4 Newton's Law and ApplicationsMak YabuNo ratings yet
- Edited Module1 ThermoDocument18 pagesEdited Module1 ThermoAnnaliza Alcazar ApostolNo ratings yet
- A Single Stage CCM Zeta Microinverter For Solar Photovoltaic AC ModuleDocument9 pagesA Single Stage CCM Zeta Microinverter For Solar Photovoltaic AC ModuleChristian EmenikeNo ratings yet
- Fluid Mechanics Objective Type QuestionsDocument223 pagesFluid Mechanics Objective Type Questionsshivi_shivendraNo ratings yet
- Force Field AnalysisDocument10 pagesForce Field AnalysisMuhammad AliNo ratings yet
- Dynamics - Chapter 18 (Beer7)Document31 pagesDynamics - Chapter 18 (Beer7)api-3709496100% (1)
- CIGRE Bench Mark ModelDocument7 pagesCIGRE Bench Mark ModelCarlynMNo ratings yet
- CH 12 Physics AnswersDocument21 pagesCH 12 Physics AnswersSam Likes HamNo ratings yet
- Engineering Mechanics DynamicsDocument2 pagesEngineering Mechanics DynamicsMallene EhurangoNo ratings yet
- Users Guide FMG Series Electromagnetic FlowmeterDocument44 pagesUsers Guide FMG Series Electromagnetic Flowmeterdhan210No ratings yet
- CB Spec SvenskaDocument44 pagesCB Spec SvenskaTravis WoodNo ratings yet
- Switch Mode Power Supply: (15/35/50/100/150/300/600-W Models)Document59 pagesSwitch Mode Power Supply: (15/35/50/100/150/300/600-W Models)satsk008No ratings yet
- Physics 9 12Document179 pagesPhysics 9 12Qulb e AbbasNo ratings yet
- Journal of Theoretics: Viscosity and Cohesion PressureDocument5 pagesJournal of Theoretics: Viscosity and Cohesion PressureandraaaaapmNo ratings yet
- SIOP Lesson Plan (3) 3-14-13Document4 pagesSIOP Lesson Plan (3) 3-14-13ksal78No ratings yet
- Instrumention Qualifier: Displacement SensorsDocument20 pagesInstrumention Qualifier: Displacement SensorsColin LyonsNo ratings yet
- Equipment Failures - IEEE 493Document31 pagesEquipment Failures - IEEE 493sridhar30481647No ratings yet
- Momentum and ImpulseDocument37 pagesMomentum and ImpulseJohn Carlo FranciscoNo ratings yet
- Earth PitDocument4 pagesEarth PitvempadareddyNo ratings yet
- On The Motion of The Centre of Mass of A System of ParticlesDocument14 pagesOn The Motion of The Centre of Mass of A System of ParticlesLuiz H FrançaNo ratings yet
- Physics Formula Sheet by MedAngleDocument17 pagesPhysics Formula Sheet by MedAngleShahab SarwarNo ratings yet
- MP EM Ass 18: Induction and Faraday's LawDocument12 pagesMP EM Ass 18: Induction and Faraday's LawBlueAstro100% (4)
- WEG Product Line Automation 50019085 Brochure enDocument40 pagesWEG Product Line Automation 50019085 Brochure enGabriel Verdesoto YepezNo ratings yet