Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Winters PreviewDocument265 pagesWinters PreviewcqpresscustomNo ratings yet
- InstallationDirective C13 IvecoDocument60 pagesInstallationDirective C13 Ivecoblaktion0% (1)
- Aspirations of Peace and Nonviolence-Chandan-Sukumar-SenguptaDocument7 pagesAspirations of Peace and Nonviolence-Chandan-Sukumar-SenguptaSENGUPTA CHANDANNo ratings yet
- Environmental ScienceDocument2 pagesEnvironmental Sciencegillianbernice.alaNo ratings yet
- Diesel Engine Crankshaft DisassemblyDocument15 pagesDiesel Engine Crankshaft DisassemblyAnshar NaraNo ratings yet
- Homeopathy For Intestinal Parasites and WormsDocument4 pagesHomeopathy For Intestinal Parasites and WormsWazhul QamarNo ratings yet
- 1 Pre-Lab: ELEC2201 Signals & Linear Systems MDocument7 pages1 Pre-Lab: ELEC2201 Signals & Linear Systems MPhilip SalmonyNo ratings yet
- NSO Set-C Answer KeysDocument12 pagesNSO Set-C Answer KeysMota Chashma100% (1)
- Department of Business Administration: Submitted ToDocument15 pagesDepartment of Business Administration: Submitted Topinky271994No ratings yet
- Andon PDFDocument24 pagesAndon PDFFrilya Andarni Saragih SumbayakNo ratings yet
- FEG Token Litepaper v2.1Document15 pagesFEG Token Litepaper v2.1TelorNo ratings yet
- Unit 4 HadoopDocument86 pagesUnit 4 HadoopShivanshuSinghNo ratings yet
- Review of Related LiteratureDocument4 pagesReview of Related Literatureimmanuel AciertoNo ratings yet
- YOGESH PROJECT (1) - Converted (1) (1) 23Document71 pagesYOGESH PROJECT (1) - Converted (1) (1) 23Satyam BobadeNo ratings yet
- Feasibility Study Project Proposal RequirementsDocument2 pagesFeasibility Study Project Proposal RequirementsErick NgosiaNo ratings yet
- Laporan Kasus (Stroke NHS)Document4 pagesLaporan Kasus (Stroke NHS)keluargacendanaNo ratings yet
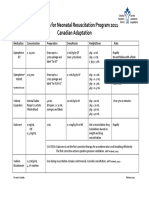
- Medications For Neonatal Resuscitation Program 2011 Canadian AdaptationDocument1 pageMedications For Neonatal Resuscitation Program 2011 Canadian AdaptationrubymayNo ratings yet
- Designing Steam Reformers For Hydrogen Production: Keep These Important Factors in Mind When Designing, Revamping or TroubleshootingDocument7 pagesDesigning Steam Reformers For Hydrogen Production: Keep These Important Factors in Mind When Designing, Revamping or TroubleshootingdjinxdNo ratings yet
- The Mango Season Q&ADocument5 pagesThe Mango Season Q&Acamellight14No ratings yet
- Passover From Wikipedia, The Free EncyclopediaDocument22 pagesPassover From Wikipedia, The Free EncyclopediaArxhenta ÇupiNo ratings yet
- Semi Detailed Lesson PlanDocument2 pagesSemi Detailed Lesson Planrey ramirezNo ratings yet
- Transmission Structures and Foundations:: CourseDocument8 pagesTransmission Structures and Foundations:: CoursejulianobiancoNo ratings yet
- Psycholinguistics: What It Is? - Language, Speech and Communication.Document4 pagesPsycholinguistics: What It Is? - Language, Speech and Communication.Edo PrasetiaNo ratings yet
- Department of Education: Guitnangbayan Elementary SchoolDocument4 pagesDepartment of Education: Guitnangbayan Elementary SchoolGuitnang bayan es 109487100% (1)
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Department of Musicology Faculty of MusicDocument196 pagesDepartment of Musicology Faculty of MusicBojan MarjanovicNo ratings yet
- Computer Graphics PDFDocument2 pagesComputer Graphics PDFAakash KhannaNo ratings yet
- Sprovieri (Final Assignment)Document9 pagesSprovieri (Final Assignment)Paulo Thiago SprovieriNo ratings yet
- Assignment-9 Noc18 Me61 23 PDFDocument3 pagesAssignment-9 Noc18 Me61 23 PDFvicky tNo ratings yet
- 2018-09-01 Classic Land RoverDocument100 pages2018-09-01 Classic Land RovergufffNo ratings yet