
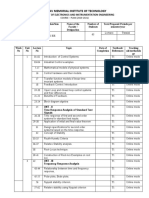
EIE306 Process Dynamics and Control Course Plan
EIE306 Process Dynamics and Control Course Plan
You might also like
- Statistical and Thermal Physics: With Computer Applications, Second EditionFrom EverandStatistical and Thermal Physics: With Computer Applications, Second EditionNo ratings yet
- Quiet Title Complaint Template Sample Example FormDocument5 pagesQuiet Title Complaint Template Sample Example FormZionNo ratings yet
- Lambda Tuning TAPPIDocument12 pagesLambda Tuning TAPPIMariana Alejandra Quioy Woods100% (1)
- QNET HVAC Workbook StudentDocument23 pagesQNET HVAC Workbook StudentJoão PauloNo ratings yet
- B1 - Liquid Level Control SystemDocument17 pagesB1 - Liquid Level Control Systemmoon star angelNo ratings yet
- Intro Theory Level FlowDocument5 pagesIntro Theory Level FlowAzura BahrudinNo ratings yet
- Chapter1 Has BeenDocument11 pagesChapter1 Has BeenOlanrewaju EmmanuelNo ratings yet
- Bai TN So 3 Dieu Khien Trinh Tu Voi Relay Su Dung Thiet Bi SMC - ENDocument9 pagesBai TN So 3 Dieu Khien Trinh Tu Voi Relay Su Dung Thiet Bi SMC - ENTÀI NGUYỄN THÀNHNo ratings yet
- Ec 2255 Control Systems 3 0 0 3Document4 pagesEc 2255 Control Systems 3 0 0 3muthuNo ratings yet
- CAS HandoutDocument2 pagesCAS HandoutMohan KolaNo ratings yet
- Introduction To Process ControlDocument48 pagesIntroduction To Process ControlYi Ling GohNo ratings yet
- Sri Ramakrishna Engineering College: Department of Electronics and Instrumentation EngineeringDocument3 pagesSri Ramakrishna Engineering College: Department of Electronics and Instrumentation EngineeringT.AnithaNo ratings yet
- Chapter 1 IntroductionDocument14 pagesChapter 1 IntroductionJULLIE CARMELLE H. CHATTONo ratings yet
- Auto II WK 9-18Document7 pagesAuto II WK 9-18Anna Marie AbalajenNo ratings yet
- Performance Assessment of A Radiant Tube Furnace's Control SystemDocument5 pagesPerformance Assessment of A Radiant Tube Furnace's Control SystemFabián José Manrique MorelosNo ratings yet
- 3361701Document7 pages3361701josephNo ratings yet
- Inno2024 Emt4203 Control II Notes r2Document35 pagesInno2024 Emt4203 Control II Notes r2kabuej3No ratings yet
- 01 IntroducDocument7 pages01 IntroducKevine KhaledNo ratings yet
- Department of Eie: SRM UniversityDocument3 pagesDepartment of Eie: SRM UniversityRameshkumar JayaramanNo ratings yet
- Lesson Plan - Control System - EC503PC - III - 2020-21Document3 pagesLesson Plan - Control System - EC503PC - III - 2020-21kailashjkNo ratings yet
- Pids PIDDocument126 pagesPids PIDjohnshxxx100% (1)
- Engineering Thermodynamics (In Si Units) - NodrmDocument870 pagesEngineering Thermodynamics (In Si Units) - NodrmKing Edwin100% (1)
- Nitaigour Premchand Mahadik, "Mechatronics", Tata Mcgraw-Hill Publishing Company LTD, 2003Document4 pagesNitaigour Premchand Mahadik, "Mechatronics", Tata Mcgraw-Hill Publishing Company LTD, 2003salagar_meNo ratings yet
- 14ME401-H&P Lesson PlanDocument3 pages14ME401-H&P Lesson PlankamalNo ratings yet
- EEC204Document6 pagesEEC204addbazNo ratings yet
- (SCAC Tropical) Cycle Logic (Eng) - 180914Document33 pages(SCAC Tropical) Cycle Logic (Eng) - 180914Tehnika SiingNo ratings yet
- CL7201-Process Dynamics and ControlDocument13 pagesCL7201-Process Dynamics and ControlPushpa RajNo ratings yet
- Anna University Regional Campus Madurai: Course PlanDocument3 pagesAnna University Regional Campus Madurai: Course PlanbhavanimurugaramalinNo ratings yet
- CHE F342 Process Dynamics and Control IISem2019-20Document3 pagesCHE F342 Process Dynamics and Control IISem2019-20Surabhi SharmaNo ratings yet
- R18 B.Tech Eie Iii YearDocument2 pagesR18 B.Tech Eie Iii YearswethaNo ratings yet
- Lab 1 - Open Loop Temp Control - SignedDocument10 pagesLab 1 - Open Loop Temp Control - SignedShashitharan PonnambalanNo ratings yet
- Course Content BTD2013Document3 pagesCourse Content BTD2013mdkhayumNo ratings yet
- OVERVIEW OF PROCESS CONTROL Part 1Document80 pagesOVERVIEW OF PROCESS CONTROL Part 1NOUREDINE MorsliNo ratings yet
- 947 ControlDocument117 pages947 ControlDavi SantosNo ratings yet
- Inno2024 Emt4203 Control II Notes r1Document15 pagesInno2024 Emt4203 Control II Notes r1kabuej3No ratings yet
- Chapter 1 - IntroductionDocument49 pagesChapter 1 - IntroductionFakhrulShahrilEzanieNo ratings yet
- ZN Open Loop MethodDocument7 pagesZN Open Loop MethodKrunoslav CvetkoNo ratings yet
- MDB 4022Z Mechatronics: Pneumatic Experiment Mechanical Engineering DepartmentDocument13 pagesMDB 4022Z Mechatronics: Pneumatic Experiment Mechanical Engineering DepartmentHaziq MansorNo ratings yet
- Contents: Proportional Valves Course Manual: Chapter 1 - Overview Chapter 3 - Valve PerformanceDocument2 pagesContents: Proportional Valves Course Manual: Chapter 1 - Overview Chapter 3 - Valve PerformanceSatya Sai Babu YeletiNo ratings yet
- IC8451 Notes PDFDocument223 pagesIC8451 Notes PDFusha raniNo ratings yet
- Heater Workbook 2006 PDFDocument16 pagesHeater Workbook 2006 PDFSandra GilbertNo ratings yet
- Advanced PID TopicsDocument15 pagesAdvanced PID TopicsJoshua JayasuriyaNo ratings yet
- Adaptive Algorithm: HandlingDocument54 pagesAdaptive Algorithm: HandlingFernandoCrespoMonNo ratings yet
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahNo ratings yet
- Exp 7 Report 1Document24 pagesExp 7 Report 1KA 19 128 Abdullah Ahmed Mohammed LahmdiNo ratings yet
- Inno2024 Emt4203 Control II Notes r4Document75 pagesInno2024 Emt4203 Control II Notes r4kabuej3No ratings yet
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument4 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessanirudhNo ratings yet
- Service Training Malaga 320/323D/324D/325D/330D HYDRAULIC EXCAVATORSDocument7 pagesService Training Malaga 320/323D/324D/325D/330D HYDRAULIC EXCAVATORSAhmed Ramadan100% (1)
- Advanced Control StrategiesDocument6 pagesAdvanced Control StrategiesHugo EGNo ratings yet
- Experiment No. 3 To Perform Delay Operation Using Push ButtonDocument4 pagesExperiment No. 3 To Perform Delay Operation Using Push ButtonShashikant PrasadNo ratings yet
- Inno2024 Emt4203 Control II Notes r3Document47 pagesInno2024 Emt4203 Control II Notes r3kabuej3No ratings yet
- Instrumentation and ControlDocument2 pagesInstrumentation and ControlKrista JacksonNo ratings yet
- Process Control: Cement Process Engineering Vade-MecumDocument9 pagesProcess Control: Cement Process Engineering Vade-MecumHasnaoui SamirNo ratings yet
- Tutorial 5Document4 pagesTutorial 5Naduni RanasingheNo ratings yet
- PLC Lab ManualDocument28 pagesPLC Lab ManualrkNo ratings yet
- Sh170011eng DDocument140 pagesSh170011eng D廖榮洲No ratings yet
- Final Project Control (Efren-Pedro)Document6 pagesFinal Project Control (Efren-Pedro)Efrén HuertaNo ratings yet
- E04-037 - Introduction To Control and Instrumentation - USDocument40 pagesE04-037 - Introduction To Control and Instrumentation - USviplawmauryaNo ratings yet
- A Summary of PI and PID Controller Tuning Rules For Processes WitDocument8 pagesA Summary of PI and PID Controller Tuning Rules For Processes WitMuhammad Ali Masood CheemaNo ratings yet
- TM480 Hydraulic Drive ControlDocument82 pagesTM480 Hydraulic Drive ControlDimas Prasetyo UtomoNo ratings yet
- The Building Environment: Active and Passive Control SystemsFrom EverandThe Building Environment: Active and Passive Control SystemsNo ratings yet
- Eceg5187 Final PDFDocument2 pagesEceg5187 Final PDFgurusaravanaNo ratings yet
- Introduction To Fuzzy Logic Control: Andrew L. NelsonDocument34 pagesIntroduction To Fuzzy Logic Control: Andrew L. NelsonClara Jerina IINo ratings yet
- UOG Wireless ConfigurationDocument14 pagesUOG Wireless ConfigurationgurusaravanaNo ratings yet
- EIE410 Digital Control SystemDocument3 pagesEIE410 Digital Control SystemgurusaravanaNo ratings yet
- 2008-09 Sem-II Paper-4 Instrumentation For Agriculture, Food & Pharmaceutical IndustryDocument2 pages2008-09 Sem-II Paper-4 Instrumentation For Agriculture, Food & Pharmaceutical IndustrygurusaravanaNo ratings yet
- 14 NaiveBayes - Problem Statement ASSDocument14 pages14 NaiveBayes - Problem Statement ASSJose100% (1)
- Governing KwuDocument21 pagesGoverning KwuVishal Kumar Laddha100% (4)
- ZomatoDocument3 pagesZomato2305112130010No ratings yet
- Infosys: Case StudyDocument6 pagesInfosys: Case StudyShivam KhandelwalNo ratings yet
- 1 14 321 XX GN de 007 Numering of Project DocumentDocument6 pages1 14 321 XX GN de 007 Numering of Project DocumentELPIDIO LUCERONo ratings yet
- AHIST 1401-01 - AY2022-T4 - Web Resources For Art History ResearchDocument3 pagesAHIST 1401-01 - AY2022-T4 - Web Resources For Art History ResearchAhmed Al-BetarNo ratings yet
- Financial AccountingDocument376 pagesFinancial AccountingMizalem Cantila50% (2)
- Role of A Business - Koontz and FulmerDocument4 pagesRole of A Business - Koontz and Fulmerniks220989No ratings yet
- GANA TD Roll Wave Measurement 04-03-26Document8 pagesGANA TD Roll Wave Measurement 04-03-26Cristopher John TolentinoNo ratings yet
- Automatic WateringDocument2 pagesAutomatic WateringkkaunNo ratings yet
- Agco Sisu Power enDocument12 pagesAgco Sisu Power enMihajlo Valka100% (1)
- 3.methodology of Pressure Settings On Storage Tanks.Document10 pages3.methodology of Pressure Settings On Storage Tanks.heyheyNo ratings yet
- RefractometryDocument16 pagesRefractometryJoo Yee Chin100% (4)
- Module 1 MacroeconomicsDocument19 pagesModule 1 MacroeconomicsAlex De Leon Montero II100% (1)
- 2021 10 YR SWM PLAN With Guideliness Drop OffDocument160 pages2021 10 YR SWM PLAN With Guideliness Drop OffALMA BELLA M. PRADONo ratings yet
- SB98 2Document6 pagesSB98 2Luis LeonNo ratings yet
- Prepositions and ConjunctionsDocument10 pagesPrepositions and ConjunctionsPhạm Đức ThịnhNo ratings yet
- 05 - MSV70 Engine ElectronicsDocument67 pages05 - MSV70 Engine ElectronicsBgm BgmNo ratings yet
- Magill July 1998Document50 pagesMagill July 1998Malachy BrowneNo ratings yet
- CWC Handbook Fo Desisgn of FC - AE Works - CompressedDocument104 pagesCWC Handbook Fo Desisgn of FC - AE Works - Compressedglh karunaNo ratings yet
- Chapter 3 2D Simulations 1Document23 pagesChapter 3 2D Simulations 1Tran Van TienNo ratings yet
- Trickle Up-Mali Case StudyDocument40 pagesTrickle Up-Mali Case StudyPoverty Outreach Working Group (POWG)No ratings yet
- Textbook Biscuit Cookie and Cracker Production Process Production and Packaging Equipment Second Edition Iain Davidson Ebook All Chapter PDFDocument54 pagesTextbook Biscuit Cookie and Cracker Production Process Production and Packaging Equipment Second Edition Iain Davidson Ebook All Chapter PDFmartin.hughes511100% (21)
- World Economic Forum - Annual Report 2000/2001Document20 pagesWorld Economic Forum - Annual Report 2000/2001World Economic Forum100% (2)
- DELA PENA V CaDocument1 pageDELA PENA V Caabakada_kayeNo ratings yet
- Comprehensive Plan For Lee CountyDocument9 pagesComprehensive Plan For Lee County3798chuckNo ratings yet
- TG0014en Ed03-IP PhoneDocument92 pagesTG0014en Ed03-IP PhoneEduardo Pereira da SilvaNo ratings yet
- DLL Cookery 9 Week 6Document2 pagesDLL Cookery 9 Week 6Negi SotneirrabNo ratings yet
- NRC Policy PDFDocument6 pagesNRC Policy PDFTarak AhujaNo ratings yet



























































































Download as doc, pdf, or txt
You might also like
- Statistical and Thermal Physics: With Computer Applications, Second EditionFrom EverandStatistical and Thermal Physics: With Computer Applications, Second EditionNo ratings yet
- Quiet Title Complaint Template Sample Example FormDocument5 pagesQuiet Title Complaint Template Sample Example FormZionNo ratings yet
- Lambda Tuning TAPPIDocument12 pagesLambda Tuning TAPPIMariana Alejandra Quioy Woods100% (1)
- QNET HVAC Workbook StudentDocument23 pagesQNET HVAC Workbook StudentJoão PauloNo ratings yet
- B1 - Liquid Level Control SystemDocument17 pagesB1 - Liquid Level Control Systemmoon star angelNo ratings yet
- Intro Theory Level FlowDocument5 pagesIntro Theory Level FlowAzura BahrudinNo ratings yet
- Chapter1 Has BeenDocument11 pagesChapter1 Has BeenOlanrewaju EmmanuelNo ratings yet
- Bai TN So 3 Dieu Khien Trinh Tu Voi Relay Su Dung Thiet Bi SMC - ENDocument9 pagesBai TN So 3 Dieu Khien Trinh Tu Voi Relay Su Dung Thiet Bi SMC - ENTÀI NGUYỄN THÀNHNo ratings yet
- Ec 2255 Control Systems 3 0 0 3Document4 pagesEc 2255 Control Systems 3 0 0 3muthuNo ratings yet
- CAS HandoutDocument2 pagesCAS HandoutMohan KolaNo ratings yet
- Introduction To Process ControlDocument48 pagesIntroduction To Process ControlYi Ling GohNo ratings yet
- Sri Ramakrishna Engineering College: Department of Electronics and Instrumentation EngineeringDocument3 pagesSri Ramakrishna Engineering College: Department of Electronics and Instrumentation EngineeringT.AnithaNo ratings yet
- Chapter 1 IntroductionDocument14 pagesChapter 1 IntroductionJULLIE CARMELLE H. CHATTONo ratings yet
- Auto II WK 9-18Document7 pagesAuto II WK 9-18Anna Marie AbalajenNo ratings yet
- Performance Assessment of A Radiant Tube Furnace's Control SystemDocument5 pagesPerformance Assessment of A Radiant Tube Furnace's Control SystemFabián José Manrique MorelosNo ratings yet
- 3361701Document7 pages3361701josephNo ratings yet
- Inno2024 Emt4203 Control II Notes r2Document35 pagesInno2024 Emt4203 Control II Notes r2kabuej3No ratings yet
- 01 IntroducDocument7 pages01 IntroducKevine KhaledNo ratings yet
- Department of Eie: SRM UniversityDocument3 pagesDepartment of Eie: SRM UniversityRameshkumar JayaramanNo ratings yet
- Lesson Plan - Control System - EC503PC - III - 2020-21Document3 pagesLesson Plan - Control System - EC503PC - III - 2020-21kailashjkNo ratings yet
- Pids PIDDocument126 pagesPids PIDjohnshxxx100% (1)
- Engineering Thermodynamics (In Si Units) - NodrmDocument870 pagesEngineering Thermodynamics (In Si Units) - NodrmKing Edwin100% (1)
- Nitaigour Premchand Mahadik, "Mechatronics", Tata Mcgraw-Hill Publishing Company LTD, 2003Document4 pagesNitaigour Premchand Mahadik, "Mechatronics", Tata Mcgraw-Hill Publishing Company LTD, 2003salagar_meNo ratings yet
- 14ME401-H&P Lesson PlanDocument3 pages14ME401-H&P Lesson PlankamalNo ratings yet
- EEC204Document6 pagesEEC204addbazNo ratings yet
- (SCAC Tropical) Cycle Logic (Eng) - 180914Document33 pages(SCAC Tropical) Cycle Logic (Eng) - 180914Tehnika SiingNo ratings yet
- CL7201-Process Dynamics and ControlDocument13 pagesCL7201-Process Dynamics and ControlPushpa RajNo ratings yet
- Anna University Regional Campus Madurai: Course PlanDocument3 pagesAnna University Regional Campus Madurai: Course PlanbhavanimurugaramalinNo ratings yet
- CHE F342 Process Dynamics and Control IISem2019-20Document3 pagesCHE F342 Process Dynamics and Control IISem2019-20Surabhi SharmaNo ratings yet
- R18 B.Tech Eie Iii YearDocument2 pagesR18 B.Tech Eie Iii YearswethaNo ratings yet
- Lab 1 - Open Loop Temp Control - SignedDocument10 pagesLab 1 - Open Loop Temp Control - SignedShashitharan PonnambalanNo ratings yet
- Course Content BTD2013Document3 pagesCourse Content BTD2013mdkhayumNo ratings yet
- OVERVIEW OF PROCESS CONTROL Part 1Document80 pagesOVERVIEW OF PROCESS CONTROL Part 1NOUREDINE MorsliNo ratings yet
- 947 ControlDocument117 pages947 ControlDavi SantosNo ratings yet
- Inno2024 Emt4203 Control II Notes r1Document15 pagesInno2024 Emt4203 Control II Notes r1kabuej3No ratings yet
- Chapter 1 - IntroductionDocument49 pagesChapter 1 - IntroductionFakhrulShahrilEzanieNo ratings yet
- ZN Open Loop MethodDocument7 pagesZN Open Loop MethodKrunoslav CvetkoNo ratings yet
- MDB 4022Z Mechatronics: Pneumatic Experiment Mechanical Engineering DepartmentDocument13 pagesMDB 4022Z Mechatronics: Pneumatic Experiment Mechanical Engineering DepartmentHaziq MansorNo ratings yet
- Contents: Proportional Valves Course Manual: Chapter 1 - Overview Chapter 3 - Valve PerformanceDocument2 pagesContents: Proportional Valves Course Manual: Chapter 1 - Overview Chapter 3 - Valve PerformanceSatya Sai Babu YeletiNo ratings yet
- IC8451 Notes PDFDocument223 pagesIC8451 Notes PDFusha raniNo ratings yet
- Heater Workbook 2006 PDFDocument16 pagesHeater Workbook 2006 PDFSandra GilbertNo ratings yet
- Advanced PID TopicsDocument15 pagesAdvanced PID TopicsJoshua JayasuriyaNo ratings yet
- Adaptive Algorithm: HandlingDocument54 pagesAdaptive Algorithm: HandlingFernandoCrespoMonNo ratings yet
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahNo ratings yet
- Exp 7 Report 1Document24 pagesExp 7 Report 1KA 19 128 Abdullah Ahmed Mohammed LahmdiNo ratings yet
- Inno2024 Emt4203 Control II Notes r4Document75 pagesInno2024 Emt4203 Control II Notes r4kabuej3No ratings yet
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument4 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessanirudhNo ratings yet
- Service Training Malaga 320/323D/324D/325D/330D HYDRAULIC EXCAVATORSDocument7 pagesService Training Malaga 320/323D/324D/325D/330D HYDRAULIC EXCAVATORSAhmed Ramadan100% (1)
- Advanced Control StrategiesDocument6 pagesAdvanced Control StrategiesHugo EGNo ratings yet
- Experiment No. 3 To Perform Delay Operation Using Push ButtonDocument4 pagesExperiment No. 3 To Perform Delay Operation Using Push ButtonShashikant PrasadNo ratings yet
- Inno2024 Emt4203 Control II Notes r3Document47 pagesInno2024 Emt4203 Control II Notes r3kabuej3No ratings yet
- Instrumentation and ControlDocument2 pagesInstrumentation and ControlKrista JacksonNo ratings yet
- Process Control: Cement Process Engineering Vade-MecumDocument9 pagesProcess Control: Cement Process Engineering Vade-MecumHasnaoui SamirNo ratings yet
- Tutorial 5Document4 pagesTutorial 5Naduni RanasingheNo ratings yet
- PLC Lab ManualDocument28 pagesPLC Lab ManualrkNo ratings yet
- Sh170011eng DDocument140 pagesSh170011eng D廖榮洲No ratings yet
- Final Project Control (Efren-Pedro)Document6 pagesFinal Project Control (Efren-Pedro)Efrén HuertaNo ratings yet
- E04-037 - Introduction To Control and Instrumentation - USDocument40 pagesE04-037 - Introduction To Control and Instrumentation - USviplawmauryaNo ratings yet
- A Summary of PI and PID Controller Tuning Rules For Processes WitDocument8 pagesA Summary of PI and PID Controller Tuning Rules For Processes WitMuhammad Ali Masood CheemaNo ratings yet
- TM480 Hydraulic Drive ControlDocument82 pagesTM480 Hydraulic Drive ControlDimas Prasetyo UtomoNo ratings yet
- The Building Environment: Active and Passive Control SystemsFrom EverandThe Building Environment: Active and Passive Control SystemsNo ratings yet
- Eceg5187 Final PDFDocument2 pagesEceg5187 Final PDFgurusaravanaNo ratings yet
- Introduction To Fuzzy Logic Control: Andrew L. NelsonDocument34 pagesIntroduction To Fuzzy Logic Control: Andrew L. NelsonClara Jerina IINo ratings yet
- UOG Wireless ConfigurationDocument14 pagesUOG Wireless ConfigurationgurusaravanaNo ratings yet
- EIE410 Digital Control SystemDocument3 pagesEIE410 Digital Control SystemgurusaravanaNo ratings yet
- 2008-09 Sem-II Paper-4 Instrumentation For Agriculture, Food & Pharmaceutical IndustryDocument2 pages2008-09 Sem-II Paper-4 Instrumentation For Agriculture, Food & Pharmaceutical IndustrygurusaravanaNo ratings yet
- 14 NaiveBayes - Problem Statement ASSDocument14 pages14 NaiveBayes - Problem Statement ASSJose100% (1)
- Governing KwuDocument21 pagesGoverning KwuVishal Kumar Laddha100% (4)
- ZomatoDocument3 pagesZomato2305112130010No ratings yet
- Infosys: Case StudyDocument6 pagesInfosys: Case StudyShivam KhandelwalNo ratings yet
- 1 14 321 XX GN de 007 Numering of Project DocumentDocument6 pages1 14 321 XX GN de 007 Numering of Project DocumentELPIDIO LUCERONo ratings yet
- AHIST 1401-01 - AY2022-T4 - Web Resources For Art History ResearchDocument3 pagesAHIST 1401-01 - AY2022-T4 - Web Resources For Art History ResearchAhmed Al-BetarNo ratings yet
- Financial AccountingDocument376 pagesFinancial AccountingMizalem Cantila50% (2)
- Role of A Business - Koontz and FulmerDocument4 pagesRole of A Business - Koontz and Fulmerniks220989No ratings yet
- GANA TD Roll Wave Measurement 04-03-26Document8 pagesGANA TD Roll Wave Measurement 04-03-26Cristopher John TolentinoNo ratings yet
- Automatic WateringDocument2 pagesAutomatic WateringkkaunNo ratings yet
- Agco Sisu Power enDocument12 pagesAgco Sisu Power enMihajlo Valka100% (1)
- 3.methodology of Pressure Settings On Storage Tanks.Document10 pages3.methodology of Pressure Settings On Storage Tanks.heyheyNo ratings yet
- RefractometryDocument16 pagesRefractometryJoo Yee Chin100% (4)
- Module 1 MacroeconomicsDocument19 pagesModule 1 MacroeconomicsAlex De Leon Montero II100% (1)
- 2021 10 YR SWM PLAN With Guideliness Drop OffDocument160 pages2021 10 YR SWM PLAN With Guideliness Drop OffALMA BELLA M. PRADONo ratings yet
- SB98 2Document6 pagesSB98 2Luis LeonNo ratings yet
- Prepositions and ConjunctionsDocument10 pagesPrepositions and ConjunctionsPhạm Đức ThịnhNo ratings yet
- 05 - MSV70 Engine ElectronicsDocument67 pages05 - MSV70 Engine ElectronicsBgm BgmNo ratings yet
- Magill July 1998Document50 pagesMagill July 1998Malachy BrowneNo ratings yet
- CWC Handbook Fo Desisgn of FC - AE Works - CompressedDocument104 pagesCWC Handbook Fo Desisgn of FC - AE Works - Compressedglh karunaNo ratings yet
- Chapter 3 2D Simulations 1Document23 pagesChapter 3 2D Simulations 1Tran Van TienNo ratings yet
- Trickle Up-Mali Case StudyDocument40 pagesTrickle Up-Mali Case StudyPoverty Outreach Working Group (POWG)No ratings yet
- Textbook Biscuit Cookie and Cracker Production Process Production and Packaging Equipment Second Edition Iain Davidson Ebook All Chapter PDFDocument54 pagesTextbook Biscuit Cookie and Cracker Production Process Production and Packaging Equipment Second Edition Iain Davidson Ebook All Chapter PDFmartin.hughes511100% (21)
- World Economic Forum - Annual Report 2000/2001Document20 pagesWorld Economic Forum - Annual Report 2000/2001World Economic Forum100% (2)
- DELA PENA V CaDocument1 pageDELA PENA V Caabakada_kayeNo ratings yet
- Comprehensive Plan For Lee CountyDocument9 pagesComprehensive Plan For Lee County3798chuckNo ratings yet
- TG0014en Ed03-IP PhoneDocument92 pagesTG0014en Ed03-IP PhoneEduardo Pereira da SilvaNo ratings yet
- DLL Cookery 9 Week 6Document2 pagesDLL Cookery 9 Week 6Negi SotneirrabNo ratings yet
- NRC Policy PDFDocument6 pagesNRC Policy PDFTarak AhujaNo ratings yet