Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
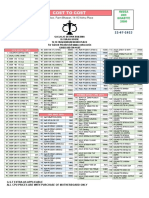
- Viewnet - Diy - Pricelist July 2020 PDFDocument2 pagesViewnet - Diy - Pricelist July 2020 PDFLian Jia JieNo ratings yet
- Presmaster Protocol ManualDocument65 pagesPresmaster Protocol ManualWmadNo ratings yet
- BR-6208AC: User ManualDocument167 pagesBR-6208AC: User ManualWmadNo ratings yet
- Octavia TDI ALH ECU Current Flow DiagramsDocument10 pagesOctavia TDI ALH ECU Current Flow DiagramsWmadNo ratings yet
- EDC15PSuite ManualDocument31 pagesEDC15PSuite ManualWmadNo ratings yet
- Technical Specification: Divers Diary Dive OrganizerDocument1 pageTechnical Specification: Divers Diary Dive OrganizerWmadNo ratings yet
- LG 42LM620S El Manual Del Propietario - Manualzz PDFDocument309 pagesLG 42LM620S El Manual Del Propietario - Manualzz PDFWmadNo ratings yet
- User Manual "Pass Thru Programming System - SAEJ2534"Document28 pagesUser Manual "Pass Thru Programming System - SAEJ2534"WmadNo ratings yet
- Multifunction Steering Wheel Controls: GF00.20-P-0003-01R Flexible Service System (FSS) Operating Instructions Model 230Document2 pagesMultifunction Steering Wheel Controls: GF00.20-P-0003-01R Flexible Service System (FSS) Operating Instructions Model 230WmadNo ratings yet
- Apc - 820-3382 051-9681 Iphone 5S-1Document46 pagesApc - 820-3382 051-9681 Iphone 5S-1WmadNo ratings yet
- Yamaha-RXE810 Micro Audio SysDocument57 pagesYamaha-RXE810 Micro Audio SysWmadNo ratings yet
- Cisco Nexus B22 Fabric Extender For Flex SystemDocument2 pagesCisco Nexus B22 Fabric Extender For Flex SystemRemNo ratings yet
- Amdahl 1967Document2 pagesAmdahl 1967adnan AdnanNo ratings yet
- Roland CJ-SC 540Document203 pagesRoland CJ-SC 540BryanHumphries100% (1)
- Nortel Optera Connect DX-55 SlideDocument53 pagesNortel Optera Connect DX-55 SlideJonatan Soares100% (1)
- Line Following Robot With Arduino PDFDocument4 pagesLine Following Robot With Arduino PDFpbikeratorNo ratings yet
- ReleaseNote - FileList of G532LWS - 2009 - X64 - V2.01Document6 pagesReleaseNote - FileList of G532LWS - 2009 - X64 - V2.01Pathan SahilNo ratings yet
- Coa Unit IvDocument147 pagesCoa Unit IvDevika csbsNo ratings yet
- E Health Care Management SystemDocument18 pagesE Health Care Management SystemKumara SNo ratings yet
- Device Driver Nov 14Document20 pagesDevice Driver Nov 14eshwar_worldNo ratings yet
- Lecture 8-1 RTL DesignDocument9 pagesLecture 8-1 RTL Design박연재No ratings yet
- Basic Structure of ComputersDocument39 pagesBasic Structure of Computersapi-3723664No ratings yet
- Asrock G41M-VS3Document46 pagesAsrock G41M-VS3Nerci PollnowNo ratings yet
- PIC16F62X: FLASH-Based 8-Bit CMOS MicrocontrollersDocument114 pagesPIC16F62X: FLASH-Based 8-Bit CMOS MicrocontrollersJames HamiltonNo ratings yet
- Materials System SpecificationDocument21 pagesMaterials System SpecificationEagle SpiritNo ratings yet
- Pic Based LockDocument5 pagesPic Based LockamshahidNo ratings yet
- Lecture 03 AV-314 PIC ConfigurationDocument21 pagesLecture 03 AV-314 PIC ConfigurationMuhammad EhtishamNo ratings yet
- Installation & Operating Instructions For DU / DC Series Area, Master & Combination Alarm SystemsDocument34 pagesInstallation & Operating Instructions For DU / DC Series Area, Master & Combination Alarm SystemsEsteban PerezNo ratings yet
- Implementation of AMBA Based AHB2APB Bridge: Bhagvati Panchal, Yogesh Parmar, Haresh SutharDocument1 pageImplementation of AMBA Based AHB2APB Bridge: Bhagvati Panchal, Yogesh Parmar, Haresh SutharDevendra BairagiNo ratings yet
- Digital Forensics Lec4 Spring 2021-2Document59 pagesDigital Forensics Lec4 Spring 2021-2change abcNo ratings yet
- Partial ConveyLinx ERSC Family Complete GuideDocument251 pagesPartial ConveyLinx ERSC Family Complete GuideabhignansNo ratings yet
- Manual OMX8USB 12USB 16USB - V1.3Document11 pagesManual OMX8USB 12USB 16USB - V1.3Jaime SoaresNo ratings yet
- HPE 3PAR StoreServ 8000 Storage Drive Support Reference-C04895558Document24 pagesHPE 3PAR StoreServ 8000 Storage Drive Support Reference-C04895558Diego ChameNo ratings yet
- Introduction To Computers - ReviewDocument17 pagesIntroduction To Computers - ReviewDebbieNo ratings yet
- PricelistDocument9 pagesPricelistSickboy YTNo ratings yet
- An Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsDocument20 pagesAn Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsMurali KrishnaNo ratings yet
- ZJET 430 Treadmill ManualDocument67 pagesZJET 430 Treadmill ManualAhmad Danial Ridwan Mohamad BolhairNo ratings yet
- ScribdburleDocument5 pagesScribdburleMelira PtacekNo ratings yet
- MAXIMUS V GENE - Motherboards - ASUS USADocument6 pagesMAXIMUS V GENE - Motherboards - ASUS USASmetell MinecraftNo ratings yet
- PLC BLOG - Siemens STEP 7Document7 pagesPLC BLOG - Siemens STEP 7Kelvin Anthony OssaiNo ratings yet