Download as pdf or txt
You might also like
- Resort and Other Tourism or Leisure ProjectsDocument15 pagesResort and Other Tourism or Leisure ProjectsCarl John BanalNo ratings yet
- Navigation Chapter-1: Direction, Latitude and LongitudeDocument76 pagesNavigation Chapter-1: Direction, Latitude and LongitudeAnusher Ansari100% (1)
- YDT0056 - B1 Camio 8.4 SP1 Manual Alignments With CADDocument48 pagesYDT0056 - B1 Camio 8.4 SP1 Manual Alignments With CADRui Pedro Ribeiro100% (3)
- 01 Engineer Proposal TemplateDocument35 pages01 Engineer Proposal TemplateMurad EltaherNo ratings yet
- Introduction of Geographical Information System: Chapter 3: Geospatial TechnologiesDocument47 pagesIntroduction of Geographical Information System: Chapter 3: Geospatial TechnologiesMinh MacNo ratings yet
- How To Represent Geospatial Data in SDMX 20181022Document47 pagesHow To Represent Geospatial Data in SDMX 20181022scorpio1878No ratings yet
- 02 - Geodesy, Datum & Projection - 02Document59 pages02 - Geodesy, Datum & Projection - 02Rahat JobayarNo ratings yet
- Chapter 2Document33 pagesChapter 2Sagar RanabhatNo ratings yet
- Chapter 8 - Coordinate Systems and Map ProjectionsDocument27 pagesChapter 8 - Coordinate Systems and Map ProjectionsJayHatNo ratings yet
- Geodesy Chapter 3Document29 pagesGeodesy Chapter 3tsegayeyayeleNo ratings yet
- Rock Slope StabilityDocument28 pagesRock Slope StabilityAe AsyraafNo ratings yet
- Foss4g2007apsgvictoriabc 1225252650075029 8 PDFDocument88 pagesFoss4g2007apsgvictoriabc 1225252650075029 8 PDFraju_irsNo ratings yet
- Lecture 10 EbDocument38 pagesLecture 10 EbNidaNo ratings yet
- Converting UTM To Latitude and Longitude (Or Vice Versa)Document7 pagesConverting UTM To Latitude and Longitude (Or Vice Versa)chuchinchuchon2272No ratings yet
- Geodesy Chapter 3Document29 pagesGeodesy Chapter 3tsegayeyayeleNo ratings yet
- Georeferencing and Coordinate SystemsDocument22 pagesGeoreferencing and Coordinate SystemsRufaro ChidemeNo ratings yet
- Group 4-Geodesy (Final) PDFDocument18 pagesGroup 4-Geodesy (Final) PDFQueci NaksNo ratings yet
- Datums, Coordinate Systems, Coordinate Reference Systems and Datum Transformations"Document39 pagesDatums, Coordinate Systems, Coordinate Reference Systems and Datum Transformations"Arijit KhanNo ratings yet
- A Comparative Study of The Harris-PriesterDocument14 pagesA Comparative Study of The Harris-PriesterAarezu OmidiNo ratings yet
- An Introduction To Basic GeodesyDocument43 pagesAn Introduction To Basic GeodesyUbaidullah KhanNo ratings yet
- AS3 LocationDocument7 pagesAS3 Locationshahid mehmoodNo ratings yet
- Question and DiscussionDocument2 pagesQuestion and DiscussionHamierul Mohamad100% (1)
- AUSPOS GPS Processing Report: Geodesy@ga - Gov.auDocument7 pagesAUSPOS GPS Processing Report: Geodesy@ga - Gov.auTrhas TeameNo ratings yet
- Gis 01Document21 pagesGis 01asmakiran251No ratings yet
- Geocentric Datum, GDM2000 For MalaysiaDocument15 pagesGeocentric Datum, GDM2000 For Malaysialegion1437100% (6)
- CDNGI Coordinate Conversion Utility v1 Sep 2009Document8 pagesCDNGI Coordinate Conversion Utility v1 Sep 2009Mfanelo MbanjwaNo ratings yet
- 9781292034935Document7 pages9781292034935mshakeel77No ratings yet
- Coordinate Systems & Map ProjectionDocument80 pagesCoordinate Systems & Map Projectionkaran v manvar100% (1)
- Geophysical Instrumentation ReportDocument12 pagesGeophysical Instrumentation ReportgaryNo ratings yet
- Compiled Gis LectureDocument390 pagesCompiled Gis LectureBonny BojiaNo ratings yet
- EE50238 - NGC 6 - MappingDocument14 pagesEE50238 - NGC 6 - Mappingappleifxxkutill2046No ratings yet
- Answer Any Two Questions From Each Part) PART A (15 X 2 30)Document30 pagesAnswer Any Two Questions From Each Part) PART A (15 X 2 30)irshadNo ratings yet
- AUSPOS - Online GPS Processing ServiceDocument7 pagesAUSPOS - Online GPS Processing ServiceRanjith KumarNo ratings yet
- CARGOLIO - Problem Set #3 Estimating Precipitation DataDocument3 pagesCARGOLIO - Problem Set #3 Estimating Precipitation DataKenneth CargolioNo ratings yet
- Satelite Series PDFDocument19 pagesSatelite Series PDFRohit VardhanNo ratings yet
- Reporte Pos-Proceso - DamascoDocument14 pagesReporte Pos-Proceso - DamascoEnuar Faber Yasno TrianaNo ratings yet
- Ton Wilks Lensatic Compass EvaluationDocument12 pagesTon Wilks Lensatic Compass EvaluationYongkang SuNo ratings yet
- Using The Cammenga Lensatic Compass With U.K. Maps: Aims and ObjectivesDocument12 pagesUsing The Cammenga Lensatic Compass With U.K. Maps: Aims and ObjectivesLegatus_PraetorianNo ratings yet
- Excel in Mapwork Teacher Guide 2023Document20 pagesExcel in Mapwork Teacher Guide 2023kamohelomashaba.kmNo ratings yet
- Evaluation of RTK-GPS and Total Station For Applications in Land SurveyingDocument7 pagesEvaluation of RTK-GPS and Total Station For Applications in Land SurveyingSivananthaa MurtheeNo ratings yet
- First Estimate of Plate Motion at Maitri GPS Site, Indian Base Station at AntarcticaDocument3 pagesFirst Estimate of Plate Motion at Maitri GPS Site, Indian Base Station at AntarcticaRajeev Kumar YadavNo ratings yet
- Planetary Fact SheetDocument2 pagesPlanetary Fact SheetAbhishek YadavNo ratings yet
- PLOTTING POLES AND CONTOURING OF STRUCTURAL GEOLOGY DATA (LAB 4a)Document8 pagesPLOTTING POLES AND CONTOURING OF STRUCTURAL GEOLOGY DATA (LAB 4a)Ahmad Aizat67% (3)
- Data Transformation ActivityDocument2 pagesData Transformation ActivityteachopensourceNo ratings yet
- Activity 8: Topographic Map III - Back Azimuths and Triangulation Maine Geological SurveyDocument9 pagesActivity 8: Topographic Map III - Back Azimuths and Triangulation Maine Geological SurveyAbera FentahunNo ratings yet
- Geographic Vs Geocentric LatitudesDocument6 pagesGeographic Vs Geocentric LatitudesDilip KiningeNo ratings yet
- Hartbeesthoek 94 (The New South African Datum)Document15 pagesHartbeesthoek 94 (The New South African Datum)Zdravko VidakovicNo ratings yet
- Digital Geography TrainingDocument76 pagesDigital Geography TrainingOODI MENAKERNo ratings yet
- Comparison of Efficiencies of Solar Tracker Systems With Static Panel Single-Axis Tracking System and Dual-Axis Tracking System With Fixed MountDocument9 pagesComparison of Efficiencies of Solar Tracker Systems With Static Panel Single-Axis Tracking System and Dual-Axis Tracking System With Fixed Mount天沢灯No ratings yet
- Sensores Remotos, SIG y GPS Examen Parcial 2 April 14, 2015 Total Points 30 NameDocument5 pagesSensores Remotos, SIG y GPS Examen Parcial 2 April 14, 2015 Total Points 30 NameAndres Almanza SoteloNo ratings yet
- Parcial2 2015 PDFDocument5 pagesParcial2 2015 PDFAndres Almanza SoteloNo ratings yet
- SkyAndTelescope 1997 03Document3 pagesSkyAndTelescope 1997 03robson_hahn100% (1)
- Chapter 1: Fundamental Concepts: OverviewDocument5 pagesChapter 1: Fundamental Concepts: OverviewESTHER TEONo ratings yet
- PRR 6 2017Document46 pagesPRR 6 2017Antoci MarianNo ratings yet
- ©es ENDocument7 pages©es ENWaho HadakNo ratings yet
- Spectral Fatigue Analysis of Jacket Stuctures in Mumbai High Field PDFDocument13 pagesSpectral Fatigue Analysis of Jacket Stuctures in Mumbai High Field PDFA_saravanavelNo ratings yet
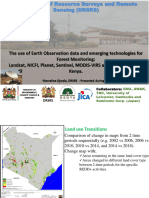
- DRSRS Presentation - COP28 Side EventDocument9 pagesDRSRS Presentation - COP28 Side EventMerceline OjwalaNo ratings yet
- Motorised Antennas For Satellite ReceptionDocument4 pagesMotorised Antennas For Satellite ReceptionAlexander WieseNo ratings yet
- Acfrogdlbl6yshnkgzbijukaviavoa8oeybd3csxhiwyhqyz9cmdceszlntu2ijnl3q Kofhc3pyabltmnzulmv1g3kwqicq88ylsww4m5el0ryjez09pzgg Wckr5g Akk Wknjgxyc5a6yhmnsDocument97 pagesAcfrogdlbl6yshnkgzbijukaviavoa8oeybd3csxhiwyhqyz9cmdceszlntu2ijnl3q Kofhc3pyabltmnzulmv1g3kwqicq88ylsww4m5el0ryjez09pzgg Wckr5g Akk Wknjgxyc5a6yhmnsMonsterNo ratings yet
- Basic of GnssDocument170 pagesBasic of GnssAlex NkurunzizaNo ratings yet
- 2023 - std10 - Landscape Analysis Through MapsDocument4 pages2023 - std10 - Landscape Analysis Through MapsHarry KELANTHODIKA MOHAMMED 10 D-9142No ratings yet
- Labsheet Curve (Survey 2)Document38 pagesLabsheet Curve (Survey 2)Mohd Amirul Najmie70% (10)
- BM11Document7 pagesBM11Yohana YonasNo ratings yet
- Chapter 1Document16 pagesChapter 1ranjan08838No ratings yet
- 16 Impact of Jets: Stationary Flat Plate. LetDocument2 pages16 Impact of Jets: Stationary Flat Plate. Letranjan08838No ratings yet
- CIV-402 (P) Fluid Mechanics Lab-II EXPERIMENT 2Document4 pagesCIV-402 (P) Fluid Mechanics Lab-II EXPERIMENT 2ranjan08838No ratings yet
- 7 GIS LayoutDocument20 pages7 GIS Layoutranjan08838No ratings yet
- Database: Spatial Data GIS DatabaseDocument31 pagesDatabase: Spatial Data GIS Databaseranjan08838No ratings yet
- θ ρ τ sin − = θ ρ cos − =: z h g zDocument18 pagesθ ρ τ sin − = θ ρ cos − =: z h g zranjan08838No ratings yet
- Soil Improvement by Internally Reinforced Stone ColumnsDocument9 pagesSoil Improvement by Internally Reinforced Stone Columnsranjan08838No ratings yet
- 03 - Energy ConversionDocument26 pages03 - Energy Conversionranjan08838No ratings yet
- Back-Calculating Vibro-Installation Stresses in Stone-Column-Reinforced SoilsDocument7 pagesBack-Calculating Vibro-Installation Stresses in Stone-Column-Reinforced Soilsranjan08838No ratings yet
- 02 - Types of TurbinesDocument46 pages02 - Types of Turbinesranjan08838No ratings yet
- 05 - Pelton TurbineDocument28 pages05 - Pelton Turbineranjan08838No ratings yet
- Nepal National Building Code: DRAFT FINAL NBC 205:2012Document46 pagesNepal National Building Code: DRAFT FINAL NBC 205:2012ranjan08838No ratings yet
- Mapdanda 2064Document23 pagesMapdanda 2064ranjan08838No ratings yet
- Cross Section Data SettingDocument52 pagesCross Section Data SettingDanni Arman, STNo ratings yet
- Chelsa File Specification Bioclim PlusDocument24 pagesChelsa File Specification Bioclim PlusGerardo MartinNo ratings yet
- OMC-140 Multifunctional NMEA Display Operators' Manual: Version 1.04 - 2015Document39 pagesOMC-140 Multifunctional NMEA Display Operators' Manual: Version 1.04 - 2015Laur IriNo ratings yet
- Topographic Map of Moser RanchDocument1 pageTopographic Map of Moser RanchHistoricalMapsNo ratings yet
- NAMRIA priceListProdServDocument3 pagesNAMRIA priceListProdServMylene VillanuevaNo ratings yet
- Topographic Map of Metcalf GapDocument1 pageTopographic Map of Metcalf GapHistoricalMapsNo ratings yet
- Faultkin Mobile ManualDocument20 pagesFaultkin Mobile ManualinfitharNo ratings yet
- Tie02 200603Document6 pagesTie02 200603nobuto_2No ratings yet
- CARIS Support FilesDocument240 pagesCARIS Support Fileslatni el mehdiNo ratings yet
- E101 ASSET 7.0 Training Guide (GSM)Document318 pagesE101 ASSET 7.0 Training Guide (GSM)Ali Hattem50% (2)
- Essay Assignment E EDITEDDocument1 pageEssay Assignment E EDITEDdorahutajuluNo ratings yet
- Damage Stability BookletDocument59 pagesDamage Stability BookletMrithyunjayanRathnamNo ratings yet
- Igo Primo ManualDocument89 pagesIgo Primo ManualMika PrameswariNo ratings yet
- Zooplancton Calidad de AguaDocument26 pagesZooplancton Calidad de AguaLady Johanna Cely CoronadoNo ratings yet
- Chapter 4.Document51 pagesChapter 4.shyrra mae locmanNo ratings yet
- Syllabus Sem2Document43 pagesSyllabus Sem2JaisNo ratings yet
- Topographic Map of Shingle HillsDocument1 pageTopographic Map of Shingle HillsHistoricalMapsNo ratings yet
- Drilling PlanningDocument22 pagesDrilling PlanningSrikanth Bammhide0% (1)
- Baseline Processing Report JT1Document20 pagesBaseline Processing Report JT1m reza chandra kNo ratings yet
- Automatic Surface Creation Using Pro/ENGINEER Reverse EngineeringDocument4 pagesAutomatic Surface Creation Using Pro/ENGINEER Reverse Engineeringlehan111No ratings yet
- HEC HMS Dan Geo HMS Menggunakan Data Grid HujanDocument4 pagesHEC HMS Dan Geo HMS Menggunakan Data Grid HujanHarry ChaeruddinNo ratings yet
- Project Summary ReportDocument10 pagesProject Summary Reportluis gilberto barrera mendezNo ratings yet
- MP90 TutorialGuide PDFDocument126 pagesMP90 TutorialGuide PDFErik WijayaNo ratings yet
- Deformation Analysis Using Geodetic MethodDocument86 pagesDeformation Analysis Using Geodetic MethodVeri PramestoNo ratings yet
- Acoustic Counter-Sniper SystemDocument16 pagesAcoustic Counter-Sniper SystemNhi TruongNo ratings yet
- POSPac MMS - Release - NotesDocument59 pagesPOSPac MMS - Release - NotesFilip SkultetyNo ratings yet