Download as doc, pdf, or txt
You might also like
- EC Camp Management PlanDocument4 pagesEC Camp Management PlanJelyn Bujatin100% (18)
- Economic DispatchDocument44 pagesEconomic DispatchSalman Zafar100% (2)
- Lab-07 Unit Commitment Using Priority List SchemeDocument4 pagesLab-07 Unit Commitment Using Priority List SchemeAhsan Ali100% (2)
- 14bus Matlab CodeDocument86 pages14bus Matlab CodeRavishankar Kankale100% (3)
- Eee-Viii-Power System Operation and Control (10ee82) - Notes PDFDocument130 pagesEee-Viii-Power System Operation and Control (10ee82) - Notes PDFKvv Bapiraju81% (21)
- Parameters Which Effect Real and Reactive Power Flow: I I E X+ZDocument12 pagesParameters Which Effect Real and Reactive Power Flow: I I E X+ZvenkatNo ratings yet
- Economic Dispatch by Equal Incremental Cost Criterion PDFDocument4 pagesEconomic Dispatch by Equal Incremental Cost Criterion PDFdubuli123100% (1)
- Power System State EstimationDocument9 pagesPower System State EstimationSuvra PattanayakNo ratings yet
- Nine-Bus System: 1 General DescriptionDocument10 pagesNine-Bus System: 1 General DescriptionJoseLuisPerezNo ratings yet
- Ybus Matrix With Regulating Transformer - Self Study TopicDocument21 pagesYbus Matrix With Regulating Transformer - Self Study TopicSankar MuthuswamyNo ratings yet
- Rab Bak Reservoir KMDocument78 pagesRab Bak Reservoir KMThales Yulianus100% (2)
- CH 2-Load Flow AnalysisDocument52 pagesCH 2-Load Flow AnalysisgteklayNo ratings yet
- CH 2 Power System SecurityDocument61 pagesCH 2 Power System SecurityRadhika PriyadarshiniNo ratings yet
- II - PowerPoint Slides To Chapter 01 IntroductionDocument17 pagesII - PowerPoint Slides To Chapter 01 IntroductionVishesh Dhillon100% (3)
- Power System Operation and Control Question Bank PDFDocument26 pagesPower System Operation and Control Question Bank PDFPushpaNo ratings yet
- PSA2 - 18EE71 - Module 04 - Unit CommitmentDocument58 pagesPSA2 - 18EE71 - Module 04 - Unit CommitmentCheck This TechNo ratings yet
- Ee6711 PSS Lab Viva QuestionsDocument10 pagesEe6711 PSS Lab Viva QuestionsshreeNo ratings yet
- Power System Operation and Control-3Document20 pagesPower System Operation and Control-3Nogdalla ShareefNo ratings yet
- Lab Manual Advanced Power System-1 (170905)Document46 pagesLab Manual Advanced Power System-1 (170905)mitulNo ratings yet
- Wa0010.Document3 pagesWa0010.Technical saadNo ratings yet
- L8 Unit Commitment Lagrange RelaxationDocument30 pagesL8 Unit Commitment Lagrange RelaxationMalik Shahzeb AliNo ratings yet
- Unit Commitment NotesDocument5 pagesUnit Commitment NotesPiyush Bansal100% (3)
- Unit Commitment ProblemDocument13 pagesUnit Commitment ProblemTanishqNo ratings yet
- Parameters Calculation For Transmission LineDocument3 pagesParameters Calculation For Transmission LinefahimNo ratings yet
- PSOC Unit 5 PDFDocument23 pagesPSOC Unit 5 PDFNarsingam GurramNo ratings yet
- 9 Bus System Dynamics and ProtectionDocument117 pages9 Bus System Dynamics and ProtectionN R SHEKARNo ratings yet
- Automatic Generation ControlDocument5 pagesAutomatic Generation ControlMuhammad Nizamuddin100% (1)
- 8 EE5 CBPS LabDocument68 pages8 EE5 CBPS Labkuldeep singh50% (2)
- PMU Lecture 6 - The Impedance Model and ZbusDocument17 pagesPMU Lecture 6 - The Impedance Model and ZbusPoor AdamNo ratings yet
- Load Flow AnalysisDocument32 pagesLoad Flow AnalysisRavi ShankarNo ratings yet
- AGC Dynamic Simulation in PSSEDocument11 pagesAGC Dynamic Simulation in PSSEAmr KamalNo ratings yet
- Lab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabDocument7 pagesLab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabHayat AnsariNo ratings yet
- Psoc PDFDocument130 pagesPsoc PDFshree_rs81No ratings yet
- Power System Operation and Control: Chapter Four-One State EstimationDocument32 pagesPower System Operation and Control: Chapter Four-One State EstimationAbdi Abera Bayesa100% (1)
- Chapter 7 Lecture PowerPointDocument33 pagesChapter 7 Lecture PowerPointkyrwel100% (1)
- Power System Protection LAB Assignment: According To Given DataDocument13 pagesPower System Protection LAB Assignment: According To Given DataKhizer Khan100% (2)
- Load Flow Studies - Lecture Notes 2Document29 pagesLoad Flow Studies - Lecture Notes 2Snr Berel Shepherd100% (1)
- Siemens Power System Simulation For Engineers® (Pss/E)Document12 pagesSiemens Power System Simulation For Engineers® (Pss/E)Suterm SeccionNo ratings yet
- Reactive Power and Voltage ControlDocument77 pagesReactive Power and Voltage ControlVikram Rockzz100% (1)
- Unit Commitment ConstraintsDocument1 pageUnit Commitment Constraintssrmce89% (9)
- Bus Admittance Impedance. Matrix Algorithm. MatlabDocument4 pagesBus Admittance Impedance. Matrix Algorithm. MatlabKhurram Hashmi100% (2)
- Power System Security - PPTDocument55 pagesPower System Security - PPTSharad Patel67% (9)
- Power Factory ManualDocument190 pagesPower Factory Manualkriznar100% (1)
- PSSE System Test For Voltage Collapse AnalysisDocument22 pagesPSSE System Test For Voltage Collapse AnalysisAmberMeerab100% (1)
- Power System Analysis: Symmetrical Components, Unbalanced Fault AnalysisDocument28 pagesPower System Analysis: Symmetrical Components, Unbalanced Fault Analysisسلطان العتيبيNo ratings yet
- AaPower System AnalysisDocument79 pagesAaPower System AnalysisFlash LightNo ratings yet
- Projects Titles For Protection - W2017Document3 pagesProjects Titles For Protection - W2017Ahmad AbunassarNo ratings yet
- Realtime Control of Power Systems PDFDocument1 pageRealtime Control of Power Systems PDFpadmajasivaNo ratings yet
- R05410204-Power System Operation and ControlDocument6 pagesR05410204-Power System Operation and ControlSRINIVASA RAO GANTANo ratings yet
- Economic Operation of Power SystemsDocument16 pagesEconomic Operation of Power SystemsSai Charan Chowdary100% (2)
- Lab 6 PDFDocument21 pagesLab 6 PDFDms8sa8I100% (1)
- Pscad ModelingDocument21 pagesPscad ModelingSumith Wellawa100% (1)
- Assignment-I (Power System Stability and Control EE16103)Document2 pagesAssignment-I (Power System Stability and Control EE16103)Prasenjit Dey50% (2)
- Chapter # 4: Unit CommitmentDocument64 pagesChapter # 4: Unit CommitmentMuhammad Umair100% (1)
- En Wind Turbine Generators 2009Document22 pagesEn Wind Turbine Generators 2009evotavaNo ratings yet
- Representation of Power System Components 2 and FaultsDocument57 pagesRepresentation of Power System Components 2 and FaultsWanki E Phawa SungohNo ratings yet
- Load Flow by Newton Raphson MethodDocument18 pagesLoad Flow by Newton Raphson Methoddiwakar92No ratings yet
- Lab Report 8Document4 pagesLab Report 8Shaheer AhmedNo ratings yet
- Cycle IDocument32 pagesCycle Idivya1587No ratings yet
- Protection AsssignmentDocument12 pagesProtection AsssignmentLangelihle XabaNo ratings yet
- Ee3008 Ps-II Lab Manual 2Document25 pagesEe3008 Ps-II Lab Manual 2Swapnil Gade007No ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Power System Protection Assiment # 2: Esam Ammar Salem 2115213Document6 pagesPower System Protection Assiment # 2: Esam Ammar Salem 2115213اغريسةNo ratings yet
- 2012 03 PHD Davoudi PDFDocument142 pages2012 03 PHD Davoudi PDFاغريسةNo ratings yet
- University of Tripoli-Faculty of Engineering Electrical and Electronic DepartmentDocument3 pagesUniversity of Tripoli-Faculty of Engineering Electrical and Electronic DepartmentاغريسةNo ratings yet
- University of Tripoli-Faculty of Engineering Electrical and Electronic Department EE542 Power System Protection Homework (1) 03/11/2016 Egrisa Faraj Saad Zaid 12115209Document4 pagesUniversity of Tripoli-Faculty of Engineering Electrical and Electronic Department EE542 Power System Protection Homework (1) 03/11/2016 Egrisa Faraj Saad Zaid 12115209اغريسةNo ratings yet
- Chapter 11 Balanced Three Phase CircuitsDocument35 pagesChapter 11 Balanced Three Phase CircuitsاغريسةNo ratings yet
- Equivelent Circuit by StarrDocument12 pagesEquivelent Circuit by StarrاغريسةNo ratings yet
- Damping Model of Traveling Waves Corona Effect Along Extra High Voltage Three Phase LinesDocument11 pagesDamping Model of Traveling Waves Corona Effect Along Extra High Voltage Three Phase LinesاغريسةNo ratings yet
- Analysis of Discharge Damage and Breakdown in Gaseous Cavities in Insulating MaterialsDocument9 pagesAnalysis of Discharge Damage and Breakdown in Gaseous Cavities in Insulating MaterialsاغريسةNo ratings yet
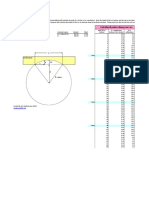
- Arc Layout Calculator: Calculated Points Along Your Arc Enter These ValuesDocument1 pageArc Layout Calculator: Calculated Points Along Your Arc Enter These ValuesPaco PacoNo ratings yet
- Training in Sports Class-XII: By: Raman Sharma, Modern Vidya Niketan School, Aravalli HillsDocument18 pagesTraining in Sports Class-XII: By: Raman Sharma, Modern Vidya Niketan School, Aravalli HillsAnish RawatNo ratings yet
- Cotton ManagementDocument24 pagesCotton ManagementramNo ratings yet
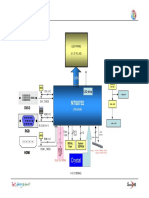
- BEJE2242VA Block Diagram 1670405Document1 pageBEJE2242VA Block Diagram 1670405David RomeroNo ratings yet
- Hazards and Risks in The KitchenDocument30 pagesHazards and Risks in The KitchenCynthia Lopez100% (1)
- HWR - Annotated Works Cited 109 PDFDocument4 pagesHWR - Annotated Works Cited 109 PDFalay3No ratings yet
- ,DanaInfo Blvsapep32, Port 50000+Markem-Imaje 3520 Ribbon Datasheet PDFDocument2 pages,DanaInfo Blvsapep32, Port 50000+Markem-Imaje 3520 Ribbon Datasheet PDFIrpan SusiloNo ratings yet
- Development of 1 Phase of Master Plan at Mormugao Port: Final Feasibility ReportDocument173 pagesDevelopment of 1 Phase of Master Plan at Mormugao Port: Final Feasibility ReportMinh TríNo ratings yet
- Physics: NO Judul PengarangDocument4 pagesPhysics: NO Judul Pengarangkartini11No ratings yet
- 11.2 Domain Bacteria and Archaea PDFDocument41 pages11.2 Domain Bacteria and Archaea PDFMazlisya NadhirahNo ratings yet
- Romeo and Juliet Movie ComparisonDocument2 pagesRomeo and Juliet Movie Comparisonameanie68100% (2)
- F5 Physics: Chapter 3: ElectricityDocument7 pagesF5 Physics: Chapter 3: ElectricityTEE LI XUAN MoeNo ratings yet
- Staad Foundation Advanced: Product Data SheetDocument2 pagesStaad Foundation Advanced: Product Data Sheetsofonias bezabehNo ratings yet
- Xpert R410a Onoff Ar Na 230613Document62 pagesXpert R410a Onoff Ar Na 230613Wilson Segovia CarrascoNo ratings yet
- 2101 ManDocument110 pages2101 ManValentin soliñoNo ratings yet
- Searchq Elbow+Mercury+Steering+Pressure&Rlz 1CDGOYI EnAE911AE911&Hl en US&Ei 8kFNZNmIPNmB9u8P1ZaV2Ac&OqDocument1 pageSearchq Elbow+Mercury+Steering+Pressure&Rlz 1CDGOYI EnAE911AE911&Hl en US&Ei 8kFNZNmIPNmB9u8P1ZaV2Ac&Oqt8fn5ykc84No ratings yet
- Planning For The Next Global PandemicDocument6 pagesPlanning For The Next Global PandemicCOproduções Culturais e ArtísticasNo ratings yet
- Definium Amx 700Document240 pagesDefinium Amx 700محمدعبدالخالق العلوانيNo ratings yet
- Auditorium Acoustics 101: by Arthur NoxonDocument4 pagesAuditorium Acoustics 101: by Arthur NoxonMani MuruganNo ratings yet
- Sub Contractor at Nominated Subcontractor (NSC) Local Contractor Vs Domestic Contractor at - The CHAT-QSDocument11 pagesSub Contractor at Nominated Subcontractor (NSC) Local Contractor Vs Domestic Contractor at - The CHAT-QSLukman HakimNo ratings yet
- Water Needs and Hydration For Cats and Dogs - Brain M.zanghiDocument9 pagesWater Needs and Hydration For Cats and Dogs - Brain M.zanghiann nnNo ratings yet
- Yo Rub ADocument17 pagesYo Rub ARowland Anton Barkley57% (7)
- 48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFDocument13 pages48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFsunil kumarNo ratings yet
- Pamantasan NG Lungsod NG Maynila Intramuros, ManilaDocument2 pagesPamantasan NG Lungsod NG Maynila Intramuros, ManilaWacko AsahanNo ratings yet
- Assessment 1 Form 1Document2 pagesAssessment 1 Form 1Bhoosan AncharazNo ratings yet
- S001 76-10526-Detail Design: Adac Midfield Terminal Fire Station Structural General Notes & Details Sheet 1Document1 pageS001 76-10526-Detail Design: Adac Midfield Terminal Fire Station Structural General Notes & Details Sheet 1Mazen Ismail0% (1)
- Business Proposal For Setting Up of A Jacket 2003Document37 pagesBusiness Proposal For Setting Up of A Jacket 2003Abhinav Akash SinghNo ratings yet
- Black KnightDocument3 pagesBlack KnightMattNo ratings yet