
Syllabus
Syllabus
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ATPL - PoF - High Speed AerodynamicsDocument31 pagesATPL - PoF - High Speed AerodynamicsNuno ArnaudNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- INVESTIGATORY PROJECT PhyDocument15 pagesINVESTIGATORY PROJECT Phymuhammadjasoor100% (4)
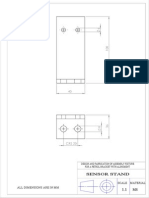
- Sensor Stand: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageSensor Stand: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Final Assembly3.No AdddDocument1 pageFinal Assembly3.No AddduismechprojectNo ratings yet
- NX Nastran: Answers For IndustryDocument20 pagesNX Nastran: Answers For IndustryuismechprojectNo ratings yet
- 3D Space Frame Example: Problem DescriptionDocument4 pages3D Space Frame Example: Problem DescriptionuismechprojectNo ratings yet
- Compression and Decompression Using Huffman Convention SynopsisDocument10 pagesCompression and Decompression Using Huffman Convention SynopsisuismechprojectNo ratings yet
- Code Variable-Length Code Code Word PrefixDocument3 pagesCode Variable-Length Code Code Word PrefixuismechprojectNo ratings yet
- Spacer: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageSpacer: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlignmentDocument6 pagesDesign and Fabrication of Assembly Fixture For A Petrol Bracket With AlignmentuismechprojectNo ratings yet
- Bottom Base Plate With Limit Switch: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageBottom Base Plate With Limit Switch: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Baseplate With Sensor StandDocument1 pageBaseplate With Sensor StanduismechprojectNo ratings yet
- All Dimensions Are in MM: Bottom Base Plate With Limit SwitchDocument1 pageAll Dimensions Are in MM: Bottom Base Plate With Limit SwitchuismechprojectNo ratings yet
- Calculating Magnetic FieldDocument24 pagesCalculating Magnetic Fieldcristilyn pangosfianNo ratings yet
- MIT22 312F15 Note L4Document65 pagesMIT22 312F15 Note L4udaykumar8995No ratings yet
- Pendulum Underdamped SystemDocument7 pagesPendulum Underdamped SystemJitender YadavNo ratings yet
- Dark Matter PDFDocument120 pagesDark Matter PDFAswin VengatNo ratings yet
- Aerodynamics PDFDocument53 pagesAerodynamics PDFRomar Aduan Jr.No ratings yet
- Mathcad - Footing F-2Document38 pagesMathcad - Footing F-2lnt4No ratings yet
- Marking Scheme Premock 2022 Physics Class 10Document11 pagesMarking Scheme Premock 2022 Physics Class 10UDHAY KIRANNo ratings yet
- Ground Movements - A Hidden Source of Loading On Deep FoundationsDocument17 pagesGround Movements - A Hidden Source of Loading On Deep Foundationsedward the iiiNo ratings yet
- Modelling The Gas Well Liquid Loading ProcessDocument10 pagesModelling The Gas Well Liquid Loading ProcessTeddy GeovanieNo ratings yet
- CFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringDocument12 pagesCFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringVipul AgrawalNo ratings yet
- Why Is Surface Tension Parallel To The Surface - by Antonin MarchandDocument10 pagesWhy Is Surface Tension Parallel To The Surface - by Antonin MarchandAaryan DewanNo ratings yet
- MCQ - Unit 4 Computer Aided ManufacturingDocument3 pagesMCQ - Unit 4 Computer Aided ManufacturingDipak naikNo ratings yet
- (22051) Sheet 0 Thermodynamics and Thermochemistry TH and Ex BDocument120 pages(22051) Sheet 0 Thermodynamics and Thermochemistry TH and Ex Bjust danceNo ratings yet
- Dynamic Responses of SystemsDocument68 pagesDynamic Responses of Systemsgiriaj kokareNo ratings yet
- Thermal PhysicsDocument63 pagesThermal PhysicsDeym Gómez0% (1)
- Trans3004 HX Rev2Document12 pagesTrans3004 HX Rev2Glacier RamkissoonNo ratings yet
- Dynamics of A Controlled Flexible Multibody Model of A 2 MW Wind TurbineDocument10 pagesDynamics of A Controlled Flexible Multibody Model of A 2 MW Wind TurbineAbbas BahriNo ratings yet
- Thermal ConductivityDocument8 pagesThermal ConductivityBeomHee LeeNo ratings yet
- Diffraction of Laser Light: Medical Physics LabDocument4 pagesDiffraction of Laser Light: Medical Physics LabMatti LaythNo ratings yet
- Introduction To Cavitation in Hydraulic MachineryDocument14 pagesIntroduction To Cavitation in Hydraulic Machineryclaudio.ferreirademoNo ratings yet
- Modelling and Simulation of Stepper Motor For Position Control Using LabviewDocument5 pagesModelling and Simulation of Stepper Motor For Position Control Using LabviewMohamed NabilNo ratings yet
- Assignment-7question and SolutionDocument7 pagesAssignment-7question and SolutionSamuelNo ratings yet
- Classification of Particles in The Submicron Range in An Impeller Wheel Air ClassifierDocument9 pagesClassification of Particles in The Submicron Range in An Impeller Wheel Air Classifierdavibraga8041No ratings yet
- AP Physics: Applying TorqueDocument6 pagesAP Physics: Applying TorqueMiloNo ratings yet
- Shaking Table Model Test of Shanghai Tower - Xilin Lu, Yuanjun Mao, Wensheng Lu, Linping Kang - March 2013Document6 pagesShaking Table Model Test of Shanghai Tower - Xilin Lu, Yuanjun Mao, Wensheng Lu, Linping Kang - March 2013Martin Dario Mazo QuingrejoNo ratings yet
- Lab Report Process (Repaired)Document16 pagesLab Report Process (Repaired)amirulNo ratings yet
- Mechanics of Materials: Class-Ii-Ii Sem Branch-MechanicalDocument13 pagesMechanics of Materials: Class-Ii-Ii Sem Branch-MechanicalRamu AmaraNo ratings yet
- A Simple Formula For Predicting Settling Velocity of Sediment ParticlesDocument7 pagesA Simple Formula For Predicting Settling Velocity of Sediment ParticlescrisjrogersNo ratings yet

















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ATPL - PoF - High Speed AerodynamicsDocument31 pagesATPL - PoF - High Speed AerodynamicsNuno ArnaudNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- INVESTIGATORY PROJECT PhyDocument15 pagesINVESTIGATORY PROJECT Phymuhammadjasoor100% (4)
- Sensor Stand: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageSensor Stand: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Final Assembly3.No AdddDocument1 pageFinal Assembly3.No AddduismechprojectNo ratings yet
- NX Nastran: Answers For IndustryDocument20 pagesNX Nastran: Answers For IndustryuismechprojectNo ratings yet
- 3D Space Frame Example: Problem DescriptionDocument4 pages3D Space Frame Example: Problem DescriptionuismechprojectNo ratings yet
- Compression and Decompression Using Huffman Convention SynopsisDocument10 pagesCompression and Decompression Using Huffman Convention SynopsisuismechprojectNo ratings yet
- Code Variable-Length Code Code Word PrefixDocument3 pagesCode Variable-Length Code Code Word PrefixuismechprojectNo ratings yet
- Spacer: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageSpacer: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlignmentDocument6 pagesDesign and Fabrication of Assembly Fixture For A Petrol Bracket With AlignmentuismechprojectNo ratings yet
- Bottom Base Plate With Limit Switch: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentDocument1 pageBottom Base Plate With Limit Switch: Design and Fabrication of Assembly Fixture For A Petrol Bracket With AlingmentuismechprojectNo ratings yet
- Baseplate With Sensor StandDocument1 pageBaseplate With Sensor StanduismechprojectNo ratings yet
- All Dimensions Are in MM: Bottom Base Plate With Limit SwitchDocument1 pageAll Dimensions Are in MM: Bottom Base Plate With Limit SwitchuismechprojectNo ratings yet
- Calculating Magnetic FieldDocument24 pagesCalculating Magnetic Fieldcristilyn pangosfianNo ratings yet
- MIT22 312F15 Note L4Document65 pagesMIT22 312F15 Note L4udaykumar8995No ratings yet
- Pendulum Underdamped SystemDocument7 pagesPendulum Underdamped SystemJitender YadavNo ratings yet
- Dark Matter PDFDocument120 pagesDark Matter PDFAswin VengatNo ratings yet
- Aerodynamics PDFDocument53 pagesAerodynamics PDFRomar Aduan Jr.No ratings yet
- Mathcad - Footing F-2Document38 pagesMathcad - Footing F-2lnt4No ratings yet
- Marking Scheme Premock 2022 Physics Class 10Document11 pagesMarking Scheme Premock 2022 Physics Class 10UDHAY KIRANNo ratings yet
- Ground Movements - A Hidden Source of Loading On Deep FoundationsDocument17 pagesGround Movements - A Hidden Source of Loading On Deep Foundationsedward the iiiNo ratings yet
- Modelling The Gas Well Liquid Loading ProcessDocument10 pagesModelling The Gas Well Liquid Loading ProcessTeddy GeovanieNo ratings yet
- CFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringDocument12 pagesCFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringVipul AgrawalNo ratings yet
- Why Is Surface Tension Parallel To The Surface - by Antonin MarchandDocument10 pagesWhy Is Surface Tension Parallel To The Surface - by Antonin MarchandAaryan DewanNo ratings yet
- MCQ - Unit 4 Computer Aided ManufacturingDocument3 pagesMCQ - Unit 4 Computer Aided ManufacturingDipak naikNo ratings yet
- (22051) Sheet 0 Thermodynamics and Thermochemistry TH and Ex BDocument120 pages(22051) Sheet 0 Thermodynamics and Thermochemistry TH and Ex Bjust danceNo ratings yet
- Dynamic Responses of SystemsDocument68 pagesDynamic Responses of Systemsgiriaj kokareNo ratings yet
- Thermal PhysicsDocument63 pagesThermal PhysicsDeym Gómez0% (1)
- Trans3004 HX Rev2Document12 pagesTrans3004 HX Rev2Glacier RamkissoonNo ratings yet
- Dynamics of A Controlled Flexible Multibody Model of A 2 MW Wind TurbineDocument10 pagesDynamics of A Controlled Flexible Multibody Model of A 2 MW Wind TurbineAbbas BahriNo ratings yet
- Thermal ConductivityDocument8 pagesThermal ConductivityBeomHee LeeNo ratings yet
- Diffraction of Laser Light: Medical Physics LabDocument4 pagesDiffraction of Laser Light: Medical Physics LabMatti LaythNo ratings yet
- Introduction To Cavitation in Hydraulic MachineryDocument14 pagesIntroduction To Cavitation in Hydraulic Machineryclaudio.ferreirademoNo ratings yet
- Modelling and Simulation of Stepper Motor For Position Control Using LabviewDocument5 pagesModelling and Simulation of Stepper Motor For Position Control Using LabviewMohamed NabilNo ratings yet
- Assignment-7question and SolutionDocument7 pagesAssignment-7question and SolutionSamuelNo ratings yet
- Classification of Particles in The Submicron Range in An Impeller Wheel Air ClassifierDocument9 pagesClassification of Particles in The Submicron Range in An Impeller Wheel Air Classifierdavibraga8041No ratings yet
- AP Physics: Applying TorqueDocument6 pagesAP Physics: Applying TorqueMiloNo ratings yet
- Shaking Table Model Test of Shanghai Tower - Xilin Lu, Yuanjun Mao, Wensheng Lu, Linping Kang - March 2013Document6 pagesShaking Table Model Test of Shanghai Tower - Xilin Lu, Yuanjun Mao, Wensheng Lu, Linping Kang - March 2013Martin Dario Mazo QuingrejoNo ratings yet
- Lab Report Process (Repaired)Document16 pagesLab Report Process (Repaired)amirulNo ratings yet
- Mechanics of Materials: Class-Ii-Ii Sem Branch-MechanicalDocument13 pagesMechanics of Materials: Class-Ii-Ii Sem Branch-MechanicalRamu AmaraNo ratings yet
- A Simple Formula For Predicting Settling Velocity of Sediment ParticlesDocument7 pagesA Simple Formula For Predicting Settling Velocity of Sediment ParticlescrisjrogersNo ratings yet