
Android Controlled Wildlife Observation Robot
Android Controlled Wildlife Observation Robot
You might also like
- Installation Minerva t1016rDocument20 pagesInstallation Minerva t1016rIsabelle Del Pilar75% (4)
- Report On MiniprojectDocument28 pagesReport On Miniprojectrohith gombe100% (1)
- Project DocumentationDocument32 pagesProject DocumentationAlan TaylorNo ratings yet
- Panel Check ListDocument6 pagesPanel Check ListSatheesh Kumar89% (44)
- Operating Manual: 906-0014-00 Rev 8 EN 2002 Rofin-Sinar UK Ltd. Rofin SC X30Document62 pagesOperating Manual: 906-0014-00 Rev 8 EN 2002 Rofin-Sinar UK Ltd. Rofin SC X30Maria Tzagaraki100% (2)
- IOT Based Social Distancing and Monitoring Robot For QueueDocument8 pagesIOT Based Social Distancing and Monitoring Robot For QueueIJRASETPublicationsNo ratings yet
- 2.development of Blind Assistive Device in Shopping MallsDocument4 pages2.development of Blind Assistive Device in Shopping MallsJashuvaNo ratings yet
- Rbs Alarm v1Document9 pagesRbs Alarm v1frediNo ratings yet
- Icepower1000A: 1000W General Purpose Icepower AmplifierDocument17 pagesIcepower1000A: 1000W General Purpose Icepower Amplifierpalprod0% (1)
- Project Title: Wildlife Observation RobotDocument13 pagesProject Title: Wildlife Observation RobotVishal LabdeNo ratings yet
- Smart Shopping Trolley With Automated Billing Using ArduinoDocument3 pagesSmart Shopping Trolley With Automated Billing Using ArduinoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Vegetable Tracing Using IOTDocument64 pagesVegetable Tracing Using IOTSampath TNo ratings yet
- PDF - Next Step Home Automatio Final Paper 150919Document6 pagesPDF - Next Step Home Automatio Final Paper 150919Dr. Pinki Yadav YadavNo ratings yet
- Women Safety Device Using GPS and GSM ModemDocument3 pagesWomen Safety Device Using GPS and GSM ModemAnonymous izrFWiQ100% (1)
- Smart Medication DispenserDocument5 pagesSmart Medication DispenserRegine OmboyNo ratings yet
- Wireless Notice-Board Using Node MCUDocument4 pagesWireless Notice-Board Using Node MCURahul SharmaNo ratings yet
- IOT Based Home Security SystemDocument7 pagesIOT Based Home Security SystemS Jagadish PatilNo ratings yet
- Real Time Bus Tracking and Controlling SystemDocument5 pagesReal Time Bus Tracking and Controlling SystemIJSTENo ratings yet
- Bluetooth Based Wireless Device Control Using Android Mobile Phone1507960506Document19 pagesBluetooth Based Wireless Device Control Using Android Mobile Phone1507960506aravind sreeramdasNo ratings yet
- Literature Review For Temperature Based Fan Speed ControllerDocument4 pagesLiterature Review For Temperature Based Fan Speed Controllerc5qxzdj7No ratings yet
- GSM Controlled Wireless Robotic SystemDocument3 pagesGSM Controlled Wireless Robotic SystemijsretNo ratings yet
- Environment Monitoring Using IOTDocument5 pagesEnvironment Monitoring Using IOTmrunaliNo ratings yet
- IoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaDocument7 pagesIoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaIJRASETPublicationsNo ratings yet
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDocument7 pagesRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirNo ratings yet
- War Field Spying Robot Controlled by Raspberry PiDocument7 pagesWar Field Spying Robot Controlled by Raspberry PiIJRASETPublicationsNo ratings yet
- Smart Trolley SystemDocument10 pagesSmart Trolley SystemIJRASETPublicationsNo ratings yet
- IoT Operated Door Lock Using ESP32 CAM ModuleDocument3 pagesIoT Operated Door Lock Using ESP32 CAM ModuleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Guide Name Presented By: Mr. Mukul Kumar Singh Amit Yadav (13EE08)Document19 pagesGuide Name Presented By: Mr. Mukul Kumar Singh Amit Yadav (13EE08)paritosh kushwahaNo ratings yet
- E Notice Board - 2Document4 pagesE Notice Board - 2Magical MKNo ratings yet
- 2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFDocument97 pages2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFShanker PandeyNo ratings yet
- A Presentation ON "Mobile Based Network Monitoring"Document14 pagesA Presentation ON "Mobile Based Network Monitoring"Daman Deep Singh ArnejaNo ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Patients Health Monitoring Using IotDocument24 pagesPatients Health Monitoring Using IotJoshitha nuluNo ratings yet
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaNo ratings yet
- 1.speed Synchronization of Multiple MotorsDocument89 pages1.speed Synchronization of Multiple MotorsBhanu TummalapalliNo ratings yet
- IoT Based Soldier Health Monitoring and Tracking SystemDocument3 pagesIoT Based Soldier Health Monitoring and Tracking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Technical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed SensorsDocument3 pagesTechnical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed Sensorshamed razaNo ratings yet
- Wireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoDocument4 pagesWireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoAnifNo ratings yet
- Patient Monitoring System Using GSM For Hospitals and Old Age HomesDocument5 pagesPatient Monitoring System Using GSM For Hospitals and Old Age Homesvgmanjunatha100% (1)
- Suresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementDocument12 pagesSuresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementakshataNo ratings yet
- INTELLIGENT WIRELESS VIDEO CAMERA USING COMPUTER Full ReportDocument11 pagesINTELLIGENT WIRELESS VIDEO CAMERA USING COMPUTER Full ReportMohammed Nawaz Shaik50% (2)
- Real Time ECG On Internet Using Raspberry PiDocument4 pagesReal Time ECG On Internet Using Raspberry PiVardhan ShahNo ratings yet
- Advanced Electronic Walking Stick For BlindDocument5 pagesAdvanced Electronic Walking Stick For BlindGRD JournalsNo ratings yet
- "IOT Based Water Pollution Monitoring RC Boat": Prepared byDocument21 pages"IOT Based Water Pollution Monitoring RC Boat": Prepared byMiracle AlignerNo ratings yet
- On House Hold ServicesDocument15 pagesOn House Hold ServicesSheetal SonawaneNo ratings yet
- Android Gesture Controlled Robot: Mini Project OnDocument18 pagesAndroid Gesture Controlled Robot: Mini Project OnRaghu RåjNo ratings yet
- A Review of Deep Learning Methods and Applications For PDFDocument14 pagesA Review of Deep Learning Methods and Applications For PDFershadNo ratings yet
- Robotic Arm Given A Three Degree of FreedomDocument28 pagesRobotic Arm Given A Three Degree of FreedomEmmanuel OmaleNo ratings yet
- Smart Luggage SystemDocument8 pagesSmart Luggage SystemIJRASETPublicationsNo ratings yet
- Eye Gaze Movement Detection For ControllDocument5 pagesEye Gaze Movement Detection For ControllAngie Diaz TorresNo ratings yet
- Intelligent Wireless Video CameraDocument2 pagesIntelligent Wireless Video CameraMurali Sammeta100% (1)
- Smart Irrigation System Using Automated RoverDocument4 pagesSmart Irrigation System Using Automated RoverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
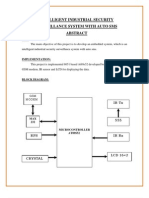
- Intelligent Industrial Security Surveillance System With Auto SmsDocument3 pagesIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriNo ratings yet
- Smart MirrorDocument3 pagesSmart MirrorIJRASETPublicationsNo ratings yet
- Project Title:: Fingerprint Voting System For UniversityDocument8 pagesProject Title:: Fingerprint Voting System For UniversityMunshiNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- Aircraft Hybrid Electric Aircraft MotorsDocument5 pagesAircraft Hybrid Electric Aircraft MotorsAdis Har-yo CahyonoNo ratings yet
- Health Monitoring GloveDocument7 pagesHealth Monitoring GloveYashNo ratings yet
- EarthquakeDocument32 pagesEarthquakeErinite SolutionsNo ratings yet
- Obstacle Avoiding Robot 1920Document13 pagesObstacle Avoiding Robot 1920Abhishek ViraleNo ratings yet
- Chapter 222 LabviewDocument65 pagesChapter 222 LabviewRahul Virmani100% (1)
- Gesture VocalizerDocument20 pagesGesture Vocalizerchandan yadavNo ratings yet
- Elegant Library Management System Using RfidDocument4 pagesElegant Library Management System Using RfiddileeppatraNo ratings yet
- Final DocumentDocument55 pagesFinal DocumentdileeppatraNo ratings yet
- 38 An Intelligent Medical Box Remotely Controlled by DoctorDocument3 pages38 An Intelligent Medical Box Remotely Controlled by DoctordileeppatraNo ratings yet
- Annexure 2Document132 pagesAnnexure 2dileeppatraNo ratings yet
- Lab MR #: 4844845: Molecular Diagnostics Test Name (Methodology) Result UOMDocument2 pagesLab MR #: 4844845: Molecular Diagnostics Test Name (Methodology) Result UOMdileeppatraNo ratings yet
- Water Monitoring & TestingDocument26 pagesWater Monitoring & TestingdileeppatraNo ratings yet
- 42 Public Water Supply Grid Monitoring Using IoT and Avoid Underground Pipelines LeakageDocument3 pages42 Public Water Supply Grid Monitoring Using IoT and Avoid Underground Pipelines LeakagedileeppatraNo ratings yet
- Water Quality Monitoring System Using IOT: Suruchi Pokhrel, Anisha Pant, Ritisha Gautam, and Dinesh Baniya KshatriDocument10 pagesWater Quality Monitoring System Using IOT: Suruchi Pokhrel, Anisha Pant, Ritisha Gautam, and Dinesh Baniya KshatridileeppatraNo ratings yet
- Design & Development of Water Monitoring SystemsDocument44 pagesDesign & Development of Water Monitoring SystemsdileeppatraNo ratings yet
- Child Safety Wearable DeviceDocument3 pagesChild Safety Wearable DevicedileeppatraNo ratings yet
- Iot Based Smart Garbage Monitoring System Using Zigbee..Document4 pagesIot Based Smart Garbage Monitoring System Using Zigbee..dileeppatraNo ratings yet
- 19 IoT Based Smart Parking and Traffic Management System For Modern CitiesDocument2 pages19 IoT Based Smart Parking and Traffic Management System For Modern CitiesdileeppatraNo ratings yet
- 45 Smart Cities Advanced Gas Cylinder BookingDocument3 pages45 Smart Cities Advanced Gas Cylinder BookingdileeppatraNo ratings yet
- Child Safety Wearable DeviceDocument3 pagesChild Safety Wearable DevicedileeppatraNo ratings yet
- Ambest Ieee Iot Project Titles-2021Document5 pagesAmbest Ieee Iot Project Titles-2021dileeppatraNo ratings yet
- 35 The Gas Leak Detection Based On A Wireless Monitoring System Using IOTDocument2 pages35 The Gas Leak Detection Based On A Wireless Monitoring System Using IOTdileeppatraNo ratings yet
- 21 IoT Based Smart Door Lock Surveillance System Using Security SensorsDocument2 pages21 IoT Based Smart Door Lock Surveillance System Using Security SensorsdileeppatraNo ratings yet
- 36 Smart Gardening Automation Using IoT With Power Saver Using Solar EnergyDocument3 pages36 Smart Gardening Automation Using IoT With Power Saver Using Solar EnergydileeppatraNo ratings yet
- 13 IoT Based Electrical Device Surveillance and Control SystemDocument3 pages13 IoT Based Electrical Device Surveillance and Control SystemdileeppatraNo ratings yet
- 20 Real Time Tracking and Alert System For Things Missing Through GPSDocument2 pages20 Real Time Tracking and Alert System For Things Missing Through GPSdileeppatraNo ratings yet
- 15 The Design and Implementation of GPS Controlled Environment Monitoring Robotic SysDocument3 pages15 The Design and Implementation of GPS Controlled Environment Monitoring Robotic SysdileeppatraNo ratings yet
- 18 Air Quality Monitoring System Within Campus by Using Wireless Sensor NetworksDocument3 pages18 Air Quality Monitoring System Within Campus by Using Wireless Sensor NetworksdileeppatraNo ratings yet
- 1 Analysis of Smart Helmets and Designing An IoT Based Smart Helmet A Cost Effective Solution For RidersDocument3 pages1 Analysis of Smart Helmets and Designing An IoT Based Smart Helmet A Cost Effective Solution For RidersdileeppatraNo ratings yet
- LD7750-DS Fuente TCL GermanDocument20 pagesLD7750-DS Fuente TCL GermanAndres Alegria100% (1)
- Sartorius Combics 1 - Combics 2: Service ManualDocument96 pagesSartorius Combics 1 - Combics 2: Service ManualSadeq NeiroukhNo ratings yet
- Bionik: The Brushless Automated Barrier With Digital ThinkingDocument7 pagesBionik: The Brushless Automated Barrier With Digital ThinkingDumitru BogdanNo ratings yet
- CIOKS CIOKOLATE Manual Ver. 1.2Document2 pagesCIOKS CIOKOLATE Manual Ver. 1.2PabNo ratings yet
- ABL8MEM24012: Panel Mount DIN Rail MountDocument1 pageABL8MEM24012: Panel Mount DIN Rail MountSebastian Alexis Muñoz PoveaNo ratings yet
- Working of DOL StarterDocument7 pagesWorking of DOL Starteralekya100% (1)
- Pump TroubleshootingDocument20 pagesPump Troubleshootingozzy75No ratings yet
- C. BBU3900 CDMA Baseband Unit Installation Guide (V400 - Draft) PDFDocument43 pagesC. BBU3900 CDMA Baseband Unit Installation Guide (V400 - Draft) PDFPaul J MsambilaNo ratings yet
- A11 Plus DSP ControllerDocument84 pagesA11 Plus DSP ControllerKarthick S100% (1)
- Difference Between UPS & InverterDocument3 pagesDifference Between UPS & InverterJesus Rodriguez100% (1)
- 2b. EN - Ditec CS12E Technical ManualDocument48 pages2b. EN - Ditec CS12E Technical Manualcarlosrei2100% (1)
- Actuator (Air Conditioner Control)Document4 pagesActuator (Air Conditioner Control)allan lariosa0% (1)
- Ch.1-1 Installation Procedures Rev0Document15 pagesCh.1-1 Installation Procedures Rev0Nguyễn PhúNo ratings yet
- Discrete IO Modules User ManualDocument572 pagesDiscrete IO Modules User ManualCuong TruongNo ratings yet
- High-Tech Range: IRI1-ES-Sensitive Earth Fault Current RelayDocument12 pagesHigh-Tech Range: IRI1-ES-Sensitive Earth Fault Current Relaydave chaudhuryNo ratings yet
- Zigbee Based Wireless Electronic Notice Board With Multipoint ReceiverDocument5 pagesZigbee Based Wireless Electronic Notice Board With Multipoint ReceiverShilpa Naikal0% (1)
- Bluetooth Controlled Electronic Home AppliancesDocument29 pagesBluetooth Controlled Electronic Home AppliancesKaos Polos Nakira100% (5)
- 8500 Training Manual Iss 3 PDFDocument69 pages8500 Training Manual Iss 3 PDFBIOCARE SERVICE100% (2)
- Three Phase Energy Meter - Counter Type: FeaturesDocument6 pagesThree Phase Energy Meter - Counter Type: FeaturesAbhinandan JainNo ratings yet
- FireNET Plus Install Manual V1.02Document144 pagesFireNET Plus Install Manual V1.02Diego CortesNo ratings yet
- Easypic v7 Manual v104cDocument38 pagesEasypic v7 Manual v104cjuan0537100% (1)
- Owner's Manual & Installation Instructions: Remote Strobe PacksDocument11 pagesOwner's Manual & Installation Instructions: Remote Strobe PacksPatrick HermanNo ratings yet
- SPEK MX700 Standard ExcelDocument3 pagesSPEK MX700 Standard ExcelubaNo ratings yet
- Modeling and Design of A SiC Zero Common-Mode Voltage Three-Level DCDC ConverterDocument79 pagesModeling and Design of A SiC Zero Common-Mode Voltage Three-Level DCDC ConverterMurat KarabacakNo ratings yet
- Wolf CGB-K-11!20!24 Montage-Und Wartungsanleitung 3061344 0609Document76 pagesWolf CGB-K-11!20!24 Montage-Und Wartungsanleitung 3061344 0609MatoNo ratings yet














































































































Download as docx, pdf, or txt
You might also like
- Installation Minerva t1016rDocument20 pagesInstallation Minerva t1016rIsabelle Del Pilar75% (4)
- Report On MiniprojectDocument28 pagesReport On Miniprojectrohith gombe100% (1)
- Project DocumentationDocument32 pagesProject DocumentationAlan TaylorNo ratings yet
- Panel Check ListDocument6 pagesPanel Check ListSatheesh Kumar89% (44)
- Operating Manual: 906-0014-00 Rev 8 EN 2002 Rofin-Sinar UK Ltd. Rofin SC X30Document62 pagesOperating Manual: 906-0014-00 Rev 8 EN 2002 Rofin-Sinar UK Ltd. Rofin SC X30Maria Tzagaraki100% (2)
- IOT Based Social Distancing and Monitoring Robot For QueueDocument8 pagesIOT Based Social Distancing and Monitoring Robot For QueueIJRASETPublicationsNo ratings yet
- 2.development of Blind Assistive Device in Shopping MallsDocument4 pages2.development of Blind Assistive Device in Shopping MallsJashuvaNo ratings yet
- Rbs Alarm v1Document9 pagesRbs Alarm v1frediNo ratings yet
- Icepower1000A: 1000W General Purpose Icepower AmplifierDocument17 pagesIcepower1000A: 1000W General Purpose Icepower Amplifierpalprod0% (1)
- Project Title: Wildlife Observation RobotDocument13 pagesProject Title: Wildlife Observation RobotVishal LabdeNo ratings yet
- Smart Shopping Trolley With Automated Billing Using ArduinoDocument3 pagesSmart Shopping Trolley With Automated Billing Using ArduinoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Vegetable Tracing Using IOTDocument64 pagesVegetable Tracing Using IOTSampath TNo ratings yet
- PDF - Next Step Home Automatio Final Paper 150919Document6 pagesPDF - Next Step Home Automatio Final Paper 150919Dr. Pinki Yadav YadavNo ratings yet
- Women Safety Device Using GPS and GSM ModemDocument3 pagesWomen Safety Device Using GPS and GSM ModemAnonymous izrFWiQ100% (1)
- Smart Medication DispenserDocument5 pagesSmart Medication DispenserRegine OmboyNo ratings yet
- Wireless Notice-Board Using Node MCUDocument4 pagesWireless Notice-Board Using Node MCURahul SharmaNo ratings yet
- IOT Based Home Security SystemDocument7 pagesIOT Based Home Security SystemS Jagadish PatilNo ratings yet
- Real Time Bus Tracking and Controlling SystemDocument5 pagesReal Time Bus Tracking and Controlling SystemIJSTENo ratings yet
- Bluetooth Based Wireless Device Control Using Android Mobile Phone1507960506Document19 pagesBluetooth Based Wireless Device Control Using Android Mobile Phone1507960506aravind sreeramdasNo ratings yet
- Literature Review For Temperature Based Fan Speed ControllerDocument4 pagesLiterature Review For Temperature Based Fan Speed Controllerc5qxzdj7No ratings yet
- GSM Controlled Wireless Robotic SystemDocument3 pagesGSM Controlled Wireless Robotic SystemijsretNo ratings yet
- Environment Monitoring Using IOTDocument5 pagesEnvironment Monitoring Using IOTmrunaliNo ratings yet
- IoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaDocument7 pagesIoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaIJRASETPublicationsNo ratings yet
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDocument7 pagesRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirNo ratings yet
- War Field Spying Robot Controlled by Raspberry PiDocument7 pagesWar Field Spying Robot Controlled by Raspberry PiIJRASETPublicationsNo ratings yet
- Smart Trolley SystemDocument10 pagesSmart Trolley SystemIJRASETPublicationsNo ratings yet
- IoT Operated Door Lock Using ESP32 CAM ModuleDocument3 pagesIoT Operated Door Lock Using ESP32 CAM ModuleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Guide Name Presented By: Mr. Mukul Kumar Singh Amit Yadav (13EE08)Document19 pagesGuide Name Presented By: Mr. Mukul Kumar Singh Amit Yadav (13EE08)paritosh kushwahaNo ratings yet
- E Notice Board - 2Document4 pagesE Notice Board - 2Magical MKNo ratings yet
- 2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFDocument97 pages2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFShanker PandeyNo ratings yet
- A Presentation ON "Mobile Based Network Monitoring"Document14 pagesA Presentation ON "Mobile Based Network Monitoring"Daman Deep Singh ArnejaNo ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Patients Health Monitoring Using IotDocument24 pagesPatients Health Monitoring Using IotJoshitha nuluNo ratings yet
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaNo ratings yet
- 1.speed Synchronization of Multiple MotorsDocument89 pages1.speed Synchronization of Multiple MotorsBhanu TummalapalliNo ratings yet
- IoT Based Soldier Health Monitoring and Tracking SystemDocument3 pagesIoT Based Soldier Health Monitoring and Tracking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Technical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed SensorsDocument3 pagesTechnical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed Sensorshamed razaNo ratings yet
- Wireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoDocument4 pagesWireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoAnifNo ratings yet
- Patient Monitoring System Using GSM For Hospitals and Old Age HomesDocument5 pagesPatient Monitoring System Using GSM For Hospitals and Old Age Homesvgmanjunatha100% (1)
- Suresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementDocument12 pagesSuresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementakshataNo ratings yet
- INTELLIGENT WIRELESS VIDEO CAMERA USING COMPUTER Full ReportDocument11 pagesINTELLIGENT WIRELESS VIDEO CAMERA USING COMPUTER Full ReportMohammed Nawaz Shaik50% (2)
- Real Time ECG On Internet Using Raspberry PiDocument4 pagesReal Time ECG On Internet Using Raspberry PiVardhan ShahNo ratings yet
- Advanced Electronic Walking Stick For BlindDocument5 pagesAdvanced Electronic Walking Stick For BlindGRD JournalsNo ratings yet
- "IOT Based Water Pollution Monitoring RC Boat": Prepared byDocument21 pages"IOT Based Water Pollution Monitoring RC Boat": Prepared byMiracle AlignerNo ratings yet
- On House Hold ServicesDocument15 pagesOn House Hold ServicesSheetal SonawaneNo ratings yet
- Android Gesture Controlled Robot: Mini Project OnDocument18 pagesAndroid Gesture Controlled Robot: Mini Project OnRaghu RåjNo ratings yet
- A Review of Deep Learning Methods and Applications For PDFDocument14 pagesA Review of Deep Learning Methods and Applications For PDFershadNo ratings yet
- Robotic Arm Given A Three Degree of FreedomDocument28 pagesRobotic Arm Given A Three Degree of FreedomEmmanuel OmaleNo ratings yet
- Smart Luggage SystemDocument8 pagesSmart Luggage SystemIJRASETPublicationsNo ratings yet
- Eye Gaze Movement Detection For ControllDocument5 pagesEye Gaze Movement Detection For ControllAngie Diaz TorresNo ratings yet
- Intelligent Wireless Video CameraDocument2 pagesIntelligent Wireless Video CameraMurali Sammeta100% (1)
- Smart Irrigation System Using Automated RoverDocument4 pagesSmart Irrigation System Using Automated RoverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligent Industrial Security Surveillance System With Auto SmsDocument3 pagesIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriNo ratings yet
- Smart MirrorDocument3 pagesSmart MirrorIJRASETPublicationsNo ratings yet
- Project Title:: Fingerprint Voting System For UniversityDocument8 pagesProject Title:: Fingerprint Voting System For UniversityMunshiNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- Aircraft Hybrid Electric Aircraft MotorsDocument5 pagesAircraft Hybrid Electric Aircraft MotorsAdis Har-yo CahyonoNo ratings yet
- Health Monitoring GloveDocument7 pagesHealth Monitoring GloveYashNo ratings yet
- EarthquakeDocument32 pagesEarthquakeErinite SolutionsNo ratings yet
- Obstacle Avoiding Robot 1920Document13 pagesObstacle Avoiding Robot 1920Abhishek ViraleNo ratings yet
- Chapter 222 LabviewDocument65 pagesChapter 222 LabviewRahul Virmani100% (1)
- Gesture VocalizerDocument20 pagesGesture Vocalizerchandan yadavNo ratings yet
- Elegant Library Management System Using RfidDocument4 pagesElegant Library Management System Using RfiddileeppatraNo ratings yet
- Final DocumentDocument55 pagesFinal DocumentdileeppatraNo ratings yet
- 38 An Intelligent Medical Box Remotely Controlled by DoctorDocument3 pages38 An Intelligent Medical Box Remotely Controlled by DoctordileeppatraNo ratings yet
- Annexure 2Document132 pagesAnnexure 2dileeppatraNo ratings yet
- Lab MR #: 4844845: Molecular Diagnostics Test Name (Methodology) Result UOMDocument2 pagesLab MR #: 4844845: Molecular Diagnostics Test Name (Methodology) Result UOMdileeppatraNo ratings yet
- Water Monitoring & TestingDocument26 pagesWater Monitoring & TestingdileeppatraNo ratings yet
- 42 Public Water Supply Grid Monitoring Using IoT and Avoid Underground Pipelines LeakageDocument3 pages42 Public Water Supply Grid Monitoring Using IoT and Avoid Underground Pipelines LeakagedileeppatraNo ratings yet
- Water Quality Monitoring System Using IOT: Suruchi Pokhrel, Anisha Pant, Ritisha Gautam, and Dinesh Baniya KshatriDocument10 pagesWater Quality Monitoring System Using IOT: Suruchi Pokhrel, Anisha Pant, Ritisha Gautam, and Dinesh Baniya KshatridileeppatraNo ratings yet
- Design & Development of Water Monitoring SystemsDocument44 pagesDesign & Development of Water Monitoring SystemsdileeppatraNo ratings yet
- Child Safety Wearable DeviceDocument3 pagesChild Safety Wearable DevicedileeppatraNo ratings yet
- Iot Based Smart Garbage Monitoring System Using Zigbee..Document4 pagesIot Based Smart Garbage Monitoring System Using Zigbee..dileeppatraNo ratings yet
- 19 IoT Based Smart Parking and Traffic Management System For Modern CitiesDocument2 pages19 IoT Based Smart Parking and Traffic Management System For Modern CitiesdileeppatraNo ratings yet
- 45 Smart Cities Advanced Gas Cylinder BookingDocument3 pages45 Smart Cities Advanced Gas Cylinder BookingdileeppatraNo ratings yet
- Child Safety Wearable DeviceDocument3 pagesChild Safety Wearable DevicedileeppatraNo ratings yet
- Ambest Ieee Iot Project Titles-2021Document5 pagesAmbest Ieee Iot Project Titles-2021dileeppatraNo ratings yet
- 35 The Gas Leak Detection Based On A Wireless Monitoring System Using IOTDocument2 pages35 The Gas Leak Detection Based On A Wireless Monitoring System Using IOTdileeppatraNo ratings yet
- 21 IoT Based Smart Door Lock Surveillance System Using Security SensorsDocument2 pages21 IoT Based Smart Door Lock Surveillance System Using Security SensorsdileeppatraNo ratings yet
- 36 Smart Gardening Automation Using IoT With Power Saver Using Solar EnergyDocument3 pages36 Smart Gardening Automation Using IoT With Power Saver Using Solar EnergydileeppatraNo ratings yet
- 13 IoT Based Electrical Device Surveillance and Control SystemDocument3 pages13 IoT Based Electrical Device Surveillance and Control SystemdileeppatraNo ratings yet
- 20 Real Time Tracking and Alert System For Things Missing Through GPSDocument2 pages20 Real Time Tracking and Alert System For Things Missing Through GPSdileeppatraNo ratings yet
- 15 The Design and Implementation of GPS Controlled Environment Monitoring Robotic SysDocument3 pages15 The Design and Implementation of GPS Controlled Environment Monitoring Robotic SysdileeppatraNo ratings yet
- 18 Air Quality Monitoring System Within Campus by Using Wireless Sensor NetworksDocument3 pages18 Air Quality Monitoring System Within Campus by Using Wireless Sensor NetworksdileeppatraNo ratings yet
- 1 Analysis of Smart Helmets and Designing An IoT Based Smart Helmet A Cost Effective Solution For RidersDocument3 pages1 Analysis of Smart Helmets and Designing An IoT Based Smart Helmet A Cost Effective Solution For RidersdileeppatraNo ratings yet
- LD7750-DS Fuente TCL GermanDocument20 pagesLD7750-DS Fuente TCL GermanAndres Alegria100% (1)
- Sartorius Combics 1 - Combics 2: Service ManualDocument96 pagesSartorius Combics 1 - Combics 2: Service ManualSadeq NeiroukhNo ratings yet
- Bionik: The Brushless Automated Barrier With Digital ThinkingDocument7 pagesBionik: The Brushless Automated Barrier With Digital ThinkingDumitru BogdanNo ratings yet
- CIOKS CIOKOLATE Manual Ver. 1.2Document2 pagesCIOKS CIOKOLATE Manual Ver. 1.2PabNo ratings yet
- ABL8MEM24012: Panel Mount DIN Rail MountDocument1 pageABL8MEM24012: Panel Mount DIN Rail MountSebastian Alexis Muñoz PoveaNo ratings yet
- Working of DOL StarterDocument7 pagesWorking of DOL Starteralekya100% (1)
- Pump TroubleshootingDocument20 pagesPump Troubleshootingozzy75No ratings yet
- C. BBU3900 CDMA Baseband Unit Installation Guide (V400 - Draft) PDFDocument43 pagesC. BBU3900 CDMA Baseband Unit Installation Guide (V400 - Draft) PDFPaul J MsambilaNo ratings yet
- A11 Plus DSP ControllerDocument84 pagesA11 Plus DSP ControllerKarthick S100% (1)
- Difference Between UPS & InverterDocument3 pagesDifference Between UPS & InverterJesus Rodriguez100% (1)
- 2b. EN - Ditec CS12E Technical ManualDocument48 pages2b. EN - Ditec CS12E Technical Manualcarlosrei2100% (1)
- Actuator (Air Conditioner Control)Document4 pagesActuator (Air Conditioner Control)allan lariosa0% (1)
- Ch.1-1 Installation Procedures Rev0Document15 pagesCh.1-1 Installation Procedures Rev0Nguyễn PhúNo ratings yet
- Discrete IO Modules User ManualDocument572 pagesDiscrete IO Modules User ManualCuong TruongNo ratings yet
- High-Tech Range: IRI1-ES-Sensitive Earth Fault Current RelayDocument12 pagesHigh-Tech Range: IRI1-ES-Sensitive Earth Fault Current Relaydave chaudhuryNo ratings yet
- Zigbee Based Wireless Electronic Notice Board With Multipoint ReceiverDocument5 pagesZigbee Based Wireless Electronic Notice Board With Multipoint ReceiverShilpa Naikal0% (1)
- Bluetooth Controlled Electronic Home AppliancesDocument29 pagesBluetooth Controlled Electronic Home AppliancesKaos Polos Nakira100% (5)
- 8500 Training Manual Iss 3 PDFDocument69 pages8500 Training Manual Iss 3 PDFBIOCARE SERVICE100% (2)
- Three Phase Energy Meter - Counter Type: FeaturesDocument6 pagesThree Phase Energy Meter - Counter Type: FeaturesAbhinandan JainNo ratings yet
- FireNET Plus Install Manual V1.02Document144 pagesFireNET Plus Install Manual V1.02Diego CortesNo ratings yet
- Easypic v7 Manual v104cDocument38 pagesEasypic v7 Manual v104cjuan0537100% (1)
- Owner's Manual & Installation Instructions: Remote Strobe PacksDocument11 pagesOwner's Manual & Installation Instructions: Remote Strobe PacksPatrick HermanNo ratings yet
- SPEK MX700 Standard ExcelDocument3 pagesSPEK MX700 Standard ExcelubaNo ratings yet
- Modeling and Design of A SiC Zero Common-Mode Voltage Three-Level DCDC ConverterDocument79 pagesModeling and Design of A SiC Zero Common-Mode Voltage Three-Level DCDC ConverterMurat KarabacakNo ratings yet
- Wolf CGB-K-11!20!24 Montage-Und Wartungsanleitung 3061344 0609Document76 pagesWolf CGB-K-11!20!24 Montage-Und Wartungsanleitung 3061344 0609MatoNo ratings yet