Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 32642892-PL WelcomeLetterDocument4 pages32642892-PL WelcomeLetterMohan ChandraNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tom Lab Reports: 2017-Me-110 Muhammad TayyabDocument13 pagesTom Lab Reports: 2017-Me-110 Muhammad TayyabTayyab ShaikhNo ratings yet
- 2017-ME-110 TR PresentationDocument7 pages2017-ME-110 TR PresentationTayyab ShaikhNo ratings yet
- 2017-ME-110 TOM LAB REPORTS MidsDocument12 pages2017-ME-110 TOM LAB REPORTS MidsTayyab ShaikhNo ratings yet
- 2017-ME-110 TOM LAB REPORTS FinalsDocument13 pages2017-ME-110 TOM LAB REPORTS FinalsTayyab ShaikhNo ratings yet
- Clinical Chemistry v1.2Document30 pagesClinical Chemistry v1.2Kervy Jay Agraviador100% (1)
- 4 Paper 4, J Coord ChemDocument17 pages4 Paper 4, J Coord ChemMuhammad IqbalNo ratings yet
- Reding Gapped TextDocument18 pagesReding Gapped TextChi Nguyen0% (2)
- A Study On Effective Cash Management System Performance in Abc Techno Labs India Private LimitedDocument8 pagesA Study On Effective Cash Management System Performance in Abc Techno Labs India Private LimitedBabasaheb JawalgeNo ratings yet
- Marketing Communications in The Digital AgeDocument49 pagesMarketing Communications in The Digital Age2m shoppingNo ratings yet
- Cambridge International AS & A Level: BIOLOGY 9700/32Document16 pagesCambridge International AS & A Level: BIOLOGY 9700/32For GamingNo ratings yet
- SWE2007 - Fundamentals of Operating SystemsDocument6 pagesSWE2007 - Fundamentals of Operating SystemsmaneeshmogallpuNo ratings yet
- A Portrait of The Artist As A Young Man - Docx12222222222Document6 pagesA Portrait of The Artist As A Young Man - Docx12222222222Andeel RanaNo ratings yet
- Maltus Population TheoryDocument6 pagesMaltus Population TheoryAlga BijuNo ratings yet
- The SpectaclesDocument37 pagesThe SpectacleslooneypersoneyNo ratings yet
- For Teachers of English: Vol. 29 No. 1 - January/June 2022 ISSN 0120-5927Document243 pagesFor Teachers of English: Vol. 29 No. 1 - January/June 2022 ISSN 0120-5927Luisa CalderónNo ratings yet
- Ebook 7 Tutorials - Cake Craft SchoolDocument45 pagesEbook 7 Tutorials - Cake Craft SchoolmariaNo ratings yet
- Orthopedics Specialist Doctor List of DhakaDocument14 pagesOrthopedics Specialist Doctor List of DhakaSultanaQuaderNo ratings yet
- What Is Intranet?: Document & Content ManagementDocument4 pagesWhat Is Intranet?: Document & Content Managementali muhdorNo ratings yet
- SH Walkthrough iNTRODUCTION TO PHILOSOPHY COREDocument10 pagesSH Walkthrough iNTRODUCTION TO PHILOSOPHY COREMaricris Galman SalamatNo ratings yet
- A Child of Books Teachers' GuideDocument12 pagesA Child of Books Teachers' GuideCandlewick Press100% (6)
- DivergentDocument3 pagesDivergentsasingNo ratings yet
- Bas 98 Atex 2156 XDocument11 pagesBas 98 Atex 2156 XFelipe CamusNo ratings yet
- NDDB's Golden Jubilee Coffee Table BookDocument2 pagesNDDB's Golden Jubilee Coffee Table Booksiva kumarNo ratings yet
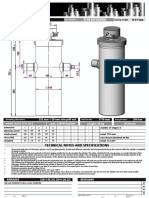
- Cilindro Penta Hydraulic PowerDocument1 pageCilindro Penta Hydraulic PowerUniversity FilesNo ratings yet
- Patrol GR: GI MA EM LC EC FE CL MT Automatic Transmission AT TF PD FA RA BR ST RS BT HA EL IDXDocument2 pagesPatrol GR: GI MA EM LC EC FE CL MT Automatic Transmission AT TF PD FA RA BR ST RS BT HA EL IDXAttila SomorjaiNo ratings yet
- Genkie 2Document39 pagesGenkie 2cherryl carmelotesNo ratings yet
- Evaluation of Methods Applied For Extraction and Processing of Oil Palm Products in Selected States of Southern NigeriaDocument12 pagesEvaluation of Methods Applied For Extraction and Processing of Oil Palm Products in Selected States of Southern NigeriaInternational Journal of Innovative Science and Research Technology100% (1)
- Introduction To Business Research Methods Vamsi KrishnaDocument25 pagesIntroduction To Business Research Methods Vamsi KrishnaEng MatanaNo ratings yet
- Bio Paper 3 f4 Akhir TahunDocument31 pagesBio Paper 3 f4 Akhir TahunDara MooreNo ratings yet
- Virtual Lab-Water QualityDocument7 pagesVirtual Lab-Water Qualityapi-268159571No ratings yet
- Kilimo Cha MbogambogaDocument107 pagesKilimo Cha Mbogambogaazizin1994No ratings yet
- 951 SignedDocument21 pages951 SignedDany GunawanNo ratings yet
- Hollow Fiber Membrane ContactorsDocument47 pagesHollow Fiber Membrane ContactorsEvelyn AntunesNo ratings yet