Download as pdf or txt
You might also like
- Chapter 2 Basic Sensors and Principles-1Document37 pagesChapter 2 Basic Sensors and Principles-1as739562978No ratings yet
- Hadjret HRSG Operation Training ManualDocument87 pagesHadjret HRSG Operation Training ManualYanis Kemoun100% (1)
- 4 SA6 Transduction Principles 2015Document32 pages4 SA6 Transduction Principles 2015Mengistu AberaNo ratings yet
- 8 SA6 Velocity and Acceleration 2015Document81 pages8 SA6 Velocity and Acceleration 2015Mengistu AberaNo ratings yet
- Topic6 Piezoresistive Sensors PDFDocument65 pagesTopic6 Piezoresistive Sensors PDFPychard JeanNo ratings yet
- 12 ResistivityDocument49 pages12 Resistivityosborne kachajeNo ratings yet
- Strain GaugesDocument5 pagesStrain Gaugesmuhammad haroonNo ratings yet
- Chapter Three PDFDocument44 pagesChapter Three PDFHassan AliNo ratings yet
- 7 - Displacement - Position - Proximity - Sensor IDocument32 pages7 - Displacement - Position - Proximity - Sensor IKARTHIK S SNo ratings yet
- Zanimljivo o Krvnom PDFDocument45 pagesZanimljivo o Krvnom PDFKatarina ZorićNo ratings yet
- Piezoresistive Sensors: PiezoresistanceDocument13 pagesPiezoresistive Sensors: PiezoresistancenabelapamunkasNo ratings yet
- 1 18 March 2015Document13 pages1 18 March 2015Shimanto BhoumikNo ratings yet
- TransducersDocument113 pagesTransducersneha yarrapothuNo ratings yet
- FALLSEM2022-23 ECE2008 ETH VL2022230102383 Reference Material IV 24-08-2022 Proximity Range and Position Sensors Part 2Document7 pagesFALLSEM2022-23 ECE2008 ETH VL2022230102383 Reference Material IV 24-08-2022 Proximity Range and Position Sensors Part 2AnanyaNo ratings yet
- Displacement SensorDocument41 pagesDisplacement SensorAdesh JagtapNo ratings yet
- Physics Lab Report On Relationship Between Voltage and CurrentDocument8 pagesPhysics Lab Report On Relationship Between Voltage and Currentsanavinaik3011No ratings yet
- Transverse Waves Longitudinal Waves Polarisation Superposition Standing WavesDocument19 pagesTransverse Waves Longitudinal Waves Polarisation Superposition Standing Waveshey ur momgqwy lolNo ratings yet
- Chapter 1 (Week 1)Document87 pagesChapter 1 (Week 1)Amirah AdlinaNo ratings yet
- Mod - 5-1Document13 pagesMod - 5-1prof nkNo ratings yet
- Physics Practical Part 1 - XII STDDocument25 pagesPhysics Practical Part 1 - XII STDjoeNo ratings yet
- Tb-Force, Magnetic and Heading SensorsDocument85 pagesTb-Force, Magnetic and Heading SensorsTarikuNo ratings yet
- Simulating The First Steps of A Walking Hexapod RobotDocument71 pagesSimulating The First Steps of A Walking Hexapod Robotbahamut518No ratings yet
- The Device Layer (Sensors & Actuators) Part OneDocument35 pagesThe Device Layer (Sensors & Actuators) Part Onenoor aliNo ratings yet
- Lecture2 SBasu PDFDocument20 pagesLecture2 SBasu PDFHimashree BhattacharyyaNo ratings yet
- Week 4 Lecture - Sensors and Principles - Slides OnlyDocument69 pagesWeek 4 Lecture - Sensors and Principles - Slides OnlyHSC CoachNo ratings yet
- Stain GaugeDocument20 pagesStain GaugearunachelamNo ratings yet
- ElectricityDocument29 pagesElectricitymark galangNo ratings yet
- WEEK 2 - Introduction To Sensors and Signals - Slides 1Document25 pagesWEEK 2 - Introduction To Sensors and Signals - Slides 1study.guideNo ratings yet
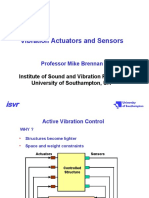
- Vibration Actuators and Sensors: Professor Mike BrennanDocument64 pagesVibration Actuators and Sensors: Professor Mike BrennannareshNo ratings yet
- Chapter5 - Sensor & TransducerDocument36 pagesChapter5 - Sensor & Transducerkmthong33% (6)
- Unit 2 - Elements of AutomationDocument48 pagesUnit 2 - Elements of AutomationGautham BVNo ratings yet
- Alternating Current Motors: Single-Phase Three-PhaseDocument56 pagesAlternating Current Motors: Single-Phase Three-Phaseeyd bartulabaNo ratings yet
- 1.overview of Electronic ComponentsDocument13 pages1.overview of Electronic ComponentsArpita 18No ratings yet
- Resistance TransducerDocument8 pagesResistance TransducerJuBi1461No ratings yet
- Torque in OrthodonticsDocument115 pagesTorque in OrthodonticsRohini TondaNo ratings yet
- MOS-1-Shear and Moment in BeamsDocument13 pagesMOS-1-Shear and Moment in BeamsWajid Ali Lecturer CED BannuNo ratings yet
- 16a Pneumatic Speed TransmitterDocument22 pages16a Pneumatic Speed Transmittermanuel1122No ratings yet
- 7 - AC Steady State Analysis - Class NotesDocument53 pages7 - AC Steady State Analysis - Class NotesMariam MoghaziNo ratings yet
- Displacement SensorsDocument54 pagesDisplacement SensorsSoham KulkarniNo ratings yet
- Arus Listrik: Pertemuan Ke 5Document36 pagesArus Listrik: Pertemuan Ke 5Bagus Abi PNo ratings yet
- Mechanical Properties: Issues To Address..Document40 pagesMechanical Properties: Issues To Address..Mat MatttNo ratings yet
- 13 Sinusoid and Phasor (Part 1) NotedDocument37 pages13 Sinusoid and Phasor (Part 1) NotedBrandon CilNo ratings yet
- 06 Displacementvelocity PDFDocument103 pages06 Displacementvelocity PDFGoran MiljkovicNo ratings yet
- 1983-Precision Support of Annular OpticsDocument13 pages1983-Precision Support of Annular OpticsbobNo ratings yet
- Rotation: Entering Rigid-Body DynamicsDocument6 pagesRotation: Entering Rigid-Body DynamicsPrakhar TiwariNo ratings yet
- M Systems: Ensors and RansducersDocument9 pagesM Systems: Ensors and RansducersAnkit KumarNo ratings yet
- M Systems: Ensors and RansducersDocument5 pagesM Systems: Ensors and RansducersAnkit KumarNo ratings yet
- Lesson #9 Sensors and Transducers-2Document70 pagesLesson #9 Sensors and Transducers-2Nyoka DunnNo ratings yet
- Unit 5Document63 pagesUnit 5Anonymous XhmybKNo ratings yet
- Sensor and Signal ConditioningDocument49 pagesSensor and Signal Conditioningsabarivelan sNo ratings yet
- Force TorqueDocument51 pagesForce TorqueSoham KulkarniNo ratings yet
- PDF Presentacion Salud Ocupacional Sector Textil - CompressDocument53 pagesPDF Presentacion Salud Ocupacional Sector Textil - CompressJuan LopezNo ratings yet
- Gears KinematicsDocument19 pagesGears Kinematicsavinashn12No ratings yet
- Measurement Systems: Lecture Notes On - Instrumentation and MeasurementsDocument15 pagesMeasurement Systems: Lecture Notes On - Instrumentation and Measurementsvihang pathakNo ratings yet
- Unit 4 Kinematic of Rigid BodiesDocument49 pagesUnit 4 Kinematic of Rigid BodiesManish ChaudharyNo ratings yet
- The Moving Coil GalvanometerDocument11 pagesThe Moving Coil GalvanometerTushar ParmarNo ratings yet
- Fluid KinematicsDocument42 pagesFluid KinematicsLovely SinghNo ratings yet
- Ac Circuit Lec-1 NotesDocument11 pagesAc Circuit Lec-1 NotesAhmad bhattiNo ratings yet
- Phy152 Lecture NoteDocument9 pagesPhy152 Lecture NoteAbubakar Olarewaju khaleedNo ratings yet
- Trainning Control LoopDocument21 pagesTrainning Control LoopYanis KemounNo ratings yet
- Active Devices Lab #6Document2 pagesActive Devices Lab #6Yanis KemounNo ratings yet
- Ac Thevenin'S Theorem and Maximum Power Transfer: Laboratory Experiment #6Document1 pageAc Thevenin'S Theorem and Maximum Power Transfer: Laboratory Experiment #6Yanis KemounNo ratings yet
- Piezoelectric Sensorics - Force Strain Pressure Acceleration and Acoustic Emission Sensors Materials and Amplifiers (PDFDrive)Document271 pagesPiezoelectric Sensorics - Force Strain Pressure Acceleration and Acoustic Emission Sensors Materials and Amplifiers (PDFDrive)Yanis KemounNo ratings yet
- Relaying Basics: GE Energy Products - EuropeDocument16 pagesRelaying Basics: GE Energy Products - EuropeYanis KemounNo ratings yet
- Univetsity M'Hamed Bougara - Boumerdes - : Faculty of TechnologueDocument3 pagesUnivetsity M'Hamed Bougara - Boumerdes - : Faculty of TechnologueYanis KemounNo ratings yet
- Ac Thevenin'S Theorem and Maximum Power Transfer: Laboratory Experiment #6Document15 pagesAc Thevenin'S Theorem and Maximum Power Transfer: Laboratory Experiment #6Yanis KemounNo ratings yet
- Sensors For Force, Load, Strain, and Torque (PDFDrive)Document208 pagesSensors For Force, Load, Strain, and Torque (PDFDrive)Yanis KemounNo ratings yet
- Reactances: University of M'hamad Bougara BoumerdesDocument1 pageReactances: University of M'hamad Bougara BoumerdesYanis KemounNo ratings yet
- The Business Letter (Lettre D'affaire)Document8 pagesThe Business Letter (Lettre D'affaire)Yanis KemounNo ratings yet
- Programming in C: Constants, Variables, and Data TypesDocument11 pagesProgramming in C: Constants, Variables, and Data TypesYanis KemounNo ratings yet
- 48322401Document184 pages48322401Yanis KemounNo ratings yet
- Durgapur: Piezoelectric Sensors & Its ApplicationsDocument17 pagesDurgapur: Piezoelectric Sensors & Its ApplicationsYanis KemounNo ratings yet
- Frequency Response: Laboratory Experiment #7Document1 pageFrequency Response: Laboratory Experiment #7Yanis KemounNo ratings yet
- Lecture4 PDFDocument18 pagesLecture4 PDFYanis KemounNo ratings yet
- Review Lab (Programming)Document3 pagesReview Lab (Programming)Yanis KemounNo ratings yet
- Frequency Response: Laboratory Experiment #7Document14 pagesFrequency Response: Laboratory Experiment #7Yanis KemounNo ratings yet
- Programming in CDocument22 pagesProgramming in CYanis KemounNo ratings yet
- Programming in C: Control and Iterative ConstructsDocument18 pagesProgramming in C: Control and Iterative ConstructsYanis KemounNo ratings yet
- Programming in C: Operators, and ExpressionsDocument21 pagesProgramming in C: Operators, and ExpressionsYanis KemounNo ratings yet
- Pressure Sensor HistoryDocument38 pagesPressure Sensor HistoryBrian McMorris100% (3)
- Review of Microscale Flow-Sensor-Enabled Mechanosensing in Small Unmanned Aerial VehiclesDocument12 pagesReview of Microscale Flow-Sensor-Enabled Mechanosensing in Small Unmanned Aerial VehiclesYasasvi ThadiboyinaNo ratings yet
- Wise NetDocument32 pagesWise NetRohan GilbertNo ratings yet
- 1.) Bourdon Tube Pressure Gauge: Experiment #5 Pressure Transducers / Gages: 3 Ways To Measure PressureDocument18 pages1.) Bourdon Tube Pressure Gauge: Experiment #5 Pressure Transducers / Gages: 3 Ways To Measure PressureIzzah HzmhNo ratings yet
- 2600T Basic Transmitter Theory (TI - 266-En - B-09 - 2013)Document32 pages2600T Basic Transmitter Theory (TI - 266-En - B-09 - 2013)JGlobexNo ratings yet
- MPXA4511A Pressure SensorDocument9 pagesMPXA4511A Pressure SensorGiuseppe ZangariNo ratings yet
- CH 05Document59 pagesCH 05RODRIGO JAVIER BRIZUELA PADILLANo ratings yet
- Resistive Transducers: Instructor: DR Alivelu M ParimiDocument28 pagesResistive Transducers: Instructor: DR Alivelu M ParimiSaketh DahagamNo ratings yet
- Piezoresistive MembraneDocument18 pagesPiezoresistive MembraneAnshika PatelNo ratings yet
- Forcr Torque Strain MeasurementDocument12 pagesForcr Torque Strain MeasurementVinay ShewaleNo ratings yet
- 18ECE302T-U1-L1, L2, L3 Course Overveiew, History of MEMS, Sensor and ActuatorsDocument99 pages18ECE302T-U1-L1, L2, L3 Course Overveiew, History of MEMS, Sensor and Actuatorsamitava2010No ratings yet
- Pressure Sensor: Class: III B.SC (Electronics) Subject: Sensor TechnologyDocument16 pagesPressure Sensor: Class: III B.SC (Electronics) Subject: Sensor TechnologyThilaga KaviNo ratings yet
- 81381C Plastic Machinery Eng PDFDocument76 pages81381C Plastic Machinery Eng PDFEvandro Amaral RodriguesNo ratings yet
- Soft Sensors For ContinuousDocument16 pagesSoft Sensors For ContinuousHari Prasath T RNo ratings yet
- Full Chapter Sensors and Measurement Systems River Publishers Series in Electronic Materials and Devices 2Nd Edition Lang PHD Walter PDFDocument48 pagesFull Chapter Sensors and Measurement Systems River Publishers Series in Electronic Materials and Devices 2Nd Edition Lang PHD Walter PDFgail.wright277100% (4)
- Page 1 of 32 Project Manager Torstein Wang Programmer Dag Martin NilsenDocument32 pagesPage 1 of 32 Project Manager Torstein Wang Programmer Dag Martin NilsenFi NaleNo ratings yet
- MPX2100AP DatasheetDocument8 pagesMPX2100AP DatasheetJoséNo ratings yet
- MPX5700Document11 pagesMPX5700mardonioandradeNo ratings yet
- (GE) P161 - 3F Gauge Pressure Sensor DieDocument2 pages(GE) P161 - 3F Gauge Pressure Sensor Died5969660No ratings yet
- CMOS-MEMS SensorDocument16 pagesCMOS-MEMS SensorFaresNo ratings yet
- The Effects of Mechanical Stress On Semiconductor DevicesDocument3 pagesThe Effects of Mechanical Stress On Semiconductor Devicesvishnu vardhanNo ratings yet
- 3 Turn MeanderDocument4 pages3 Turn Meanderanirudhsanthosh1731No ratings yet
- Lecture 4 Piezoresistive SensorsDocument25 pagesLecture 4 Piezoresistive SensorsAdnan RafiqueNo ratings yet
- MPX4250Document9 pagesMPX4250mohsihummerNo ratings yet
- TOCODYNAMOMETERDocument4 pagesTOCODYNAMOMETERAnikaNo ratings yet
- Materials, Sensors and Actuators in MEMS Technology EvolutionDocument27 pagesMaterials, Sensors and Actuators in MEMS Technology EvolutionM KalingarajNo ratings yet
- Potentiometer and Strain Gauge PDFDocument25 pagesPotentiometer and Strain Gauge PDFSantanu SantraNo ratings yet
- Keller: P T T S 21 RDocument2 pagesKeller: P T T S 21 RAmal AntonyNo ratings yet
- Fior Illo 2018Document76 pagesFior Illo 2018Anonymous qmuFcaw13No ratings yet