Download as pdf or txt
You might also like
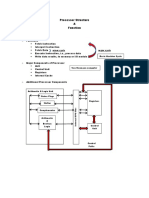
- Processor Structure and FunctionDocument55 pagesProcessor Structure and Functionmutia sabrina100% (1)
- ICS Session 04. LAB PRACTICE - Maltego Footprinting v1Document19 pagesICS Session 04. LAB PRACTICE - Maltego Footprinting v1dusexNo ratings yet
- ScreenOS Hidden Commands RevealedDocument8 pagesScreenOS Hidden Commands RevealedPuneet KumarNo ratings yet
- Processes: Bilkent University Department of Computer Engineering CS342 Operating SystemsDocument79 pagesProcesses: Bilkent University Department of Computer Engineering CS342 Operating SystemsMuhammed NaciNo ratings yet
- Threads: Concurrent ProgrammingDocument13 pagesThreads: Concurrent ProgrammingCrystal ClearNo ratings yet
- 03 ProcessesDocument72 pages03 ProcessesPrakashNo ratings yet
- AOS2Document12 pagesAOS2Iqra WaheedNo ratings yet
- ProcessesDocument8 pagesProcessesLuisNo ratings yet
- DSL 04 ProcessesDocument33 pagesDSL 04 ProcessesPulkit PrajapatiNo ratings yet
- EE-379 Embedded Systems and Applications: Real Time Operating Systems (RTOS) Part 1: Processes or Tasks and ThreadsDocument22 pagesEE-379 Embedded Systems and Applications: Real Time Operating Systems (RTOS) Part 1: Processes or Tasks and ThreadsaesyopNo ratings yet
- RtosDocument11 pagesRtosapi-3829352No ratings yet
- William Stallings Computer Organization and Architecture 9 EditionDocument55 pagesWilliam Stallings Computer Organization and Architecture 9 EditionshahbaadshahNo ratings yet
- Rtos PDFDocument12 pagesRtos PDFAqib AsadNo ratings yet
- 01 - Mod 2 - Livro AutorresponsabilidadeDocument9 pages01 - Mod 2 - Livro AutorresponsabilidadeNillyNo ratings yet
- Os Chapter3Document54 pagesOs Chapter3Saba Ghulam RasoolNo ratings yet
- Asset-V1 VIT+MSC1004+2020+type@asset+block@W2NotesDocument53 pagesAsset-V1 VIT+MSC1004+2020+type@asset+block@W2NotesAYUSH GURTUNo ratings yet
- Ee249 13 RtosDocument211 pagesEe249 13 RtosDinh Duy LeNo ratings yet
- Ch. 3 Lecture 1 - 3 PDFDocument83 pagesCh. 3 Lecture 1 - 3 PDFmikiasNo ratings yet
- Process Description and Control: Operating Systems: Internals and Design PrinciplesDocument53 pagesProcess Description and Control: Operating Systems: Internals and Design PrinciplesHurrain QueenNo ratings yet
- CS1120 - Principles of Operating Systems: Lectures 10,11,12 And13 - Memory Management Mr. Rowan N. ElominaDocument83 pagesCS1120 - Principles of Operating Systems: Lectures 10,11,12 And13 - Memory Management Mr. Rowan N. ElominaMelvin LeyvaNo ratings yet
- Process: Amit Kumar DasDocument37 pagesProcess: Amit Kumar DasIn SaneNo ratings yet
- OS UNIX&Linux Study Material E-Notes All-Units-1Document155 pagesOS UNIX&Linux Study Material E-Notes All-Units-1Karansinh ChauhanNo ratings yet
- Process Description and Control: Operating Systems: Internals and Design PrinciplesDocument69 pagesProcess Description and Control: Operating Systems: Internals and Design PrinciplesRamadan ElhendawyNo ratings yet
- L03 2 ProcessControlDocument30 pagesL03 2 ProcessControlvijethagowdNo ratings yet
- 2017edan85l4 1Document33 pages2017edan85l4 1Ly TrầnNo ratings yet
- Processes: Questions Answered in ThisDocument30 pagesProcesses: Questions Answered in ThisMeghanaNo ratings yet
- Ch6 BachDocument44 pagesCh6 BachSurid AnirbanNo ratings yet
- 02 ProcessAbstractionDocument30 pages02 ProcessAbstractionshriyabedi17No ratings yet
- Unit-III: Threads, Process Synchronization & DeadlocksDocument137 pagesUnit-III: Threads, Process Synchronization & Deadlocksdinesh reddyNo ratings yet
- 03 Threads SynchDocument144 pages03 Threads SynchHikmet HasanovNo ratings yet
- Main MemoryDocument63 pagesMain MemoryNIDHINo ratings yet
- Distributed Systems PerspectiveDocument83 pagesDistributed Systems PerspectiveRameez RashidNo ratings yet
- Lecture 4Document22 pagesLecture 4Aditya ThakurNo ratings yet
- Unit Iv Real Time Operating SystemsDocument21 pagesUnit Iv Real Time Operating SystemsKoushik RNo ratings yet
- Os AnswersDocument22 pagesOs Answersbhanu sreeNo ratings yet
- Principles of Operating System Questions and AnswersDocument15 pagesPrinciples of Operating System Questions and Answerskumar nikhilNo ratings yet
- IL-Module 4Document12 pagesIL-Module 4Kanak RTNo ratings yet
- Unix Case StudyDocument24 pagesUnix Case StudyJaikumar GuwalaniNo ratings yet
- Resumen Sistemas Operativos MendezDocument57 pagesResumen Sistemas Operativos MendezPedro Andres FlynnNo ratings yet
- Processes and Memory ManagementDocument49 pagesProcesses and Memory ManagementSiva JiNo ratings yet
- Inf583 5Document49 pagesInf583 5Raghavadeep ReddyNo ratings yet
- CH14 COA9e Processor Structure and FunctionDocument40 pagesCH14 COA9e Processor Structure and FunctionTuấnNo ratings yet
- unit-3-osDocument21 pagesunit-3-oskamisatoayaka131203No ratings yet
- Computer Systems: Processor SchedulingDocument43 pagesComputer Systems: Processor SchedulingMelvin ReyesNo ratings yet
- Process Description and Control: Operating Systems: Internals and Design PrinciplesDocument65 pagesProcess Description and Control: Operating Systems: Internals and Design Principlesmuhammad redhaNo ratings yet
- Unit 5 Real Time Operating SystemDocument13 pagesUnit 5 Real Time Operating Systemsmit patelNo ratings yet
- Slides#3 ThreadsDocument16 pagesSlides#3 Threadsmoin latifNo ratings yet
- Notas de Sistemas OperativosDocument17 pagesNotas de Sistemas OperativosJhorman MeraNo ratings yet
- Data Structures Through C LanguageDocument75 pagesData Structures Through C LanguageMuhammadNo ratings yet
- 03 Handout 1Document4 pages03 Handout 1Joshua AgsawayNo ratings yet
- Memory ManagementDocument57 pagesMemory Management1nshsankritNo ratings yet
- Chapter 3 - Process ManagementDocument15 pagesChapter 3 - Process Managementmy pcNo ratings yet
- Process and ThreadsDocument6 pagesProcess and Threadsmahi130No ratings yet
- Unit IV Rtos Based Embedded System DesignDocument121 pagesUnit IV Rtos Based Embedded System DesignAnanda muthu mani K43% (7)
- 1.interprocess Communication Mechanisms 2.memory Management and Virtual MemoryDocument45 pages1.interprocess Communication Mechanisms 2.memory Management and Virtual MemorySri VardhanNo ratings yet
- Chapter 3Document67 pagesChapter 3Itumeleng MokhachaneNo ratings yet
- Chap00 Course Introduction Đã Chuyển ĐổiDocument5 pagesChap00 Course Introduction Đã Chuyển ĐổiMy Nhat NguyenNo ratings yet
- CA Classes-11-15Document5 pagesCA Classes-11-15SrinivasaRaoNo ratings yet
- Chapter 2 (Two)Document52 pagesChapter 2 (Two)amanuelNo ratings yet
- Lecture 2 - Chap - 3Document49 pagesLecture 2 - Chap - 3Teh Kai ZeNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- Synchronization Problems: Today's LectureDocument12 pagesSynchronization Problems: Today's LectureCrystal ClearNo ratings yet
- Monitors, Condition Variabless: SemaphoresDocument20 pagesMonitors, Condition Variabless: SemaphoresCrystal ClearNo ratings yet
- Semaphores: Higher-Level Synchronization PrimitivesDocument8 pagesSemaphores: Higher-Level Synchronization PrimitivesCrystal ClearNo ratings yet
- CENG334 2008 W01bDocument17 pagesCENG334 2008 W01bCrystal ClearNo ratings yet
- Threads: Concurrent ProgrammingDocument13 pagesThreads: Concurrent ProgrammingCrystal ClearNo ratings yet
- CENG334 2008 W01aDocument15 pagesCENG334 2008 W01aCrystal ClearNo ratings yet
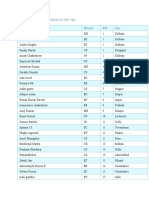
- Gate 2012 - All India Rank in Top 100 Name Stream AIR CityDocument5 pagesGate 2012 - All India Rank in Top 100 Name Stream AIR CityCrystal ClearNo ratings yet
- Single and Multithreaded ProcessesDocument23 pagesSingle and Multithreaded ProcessesCrystal ClearNo ratings yet
- Opening PagesDocument6 pagesOpening PagesCrystal ClearNo ratings yet
- Documentum Content Server 5.2.5 SP2 InstallationDocument27 pagesDocumentum Content Server 5.2.5 SP2 Installationfauxpaws0% (1)
- Extreme ProgrammingDocument2 pagesExtreme ProgrammingOye it's hubNo ratings yet
- Ict and HRM Management Perspective About The Changing Scenario IJERTCONV7IS04004Document7 pagesIct and HRM Management Perspective About The Changing Scenario IJERTCONV7IS04004Saravanan KrishnanNo ratings yet
- Pega Online TrainingDocument9 pagesPega Online TrainingAgalya sabareeswaranNo ratings yet
- Inside - OUT - SQL Server 2k19 AdminDocument104 pagesInside - OUT - SQL Server 2k19 AdminbaatoutmbNo ratings yet
- Splunk InterfaceDocument7 pagesSplunk InterfaceModaser SadatNo ratings yet
- Eetop - CN Apb SVT Uvm User GuideDocument61 pagesEetop - CN Apb SVT Uvm User Guidehaohua liangNo ratings yet
- GIS For Marine BiologyDocument23 pagesGIS For Marine BiologyNazar AlmiNo ratings yet
- Lecture 1Document31 pagesLecture 1AtharvJoshiNo ratings yet
- GAN RemovedDocument1 pageGAN Removed2019tanya.bajajNo ratings yet
- Libdmclient FOSDEM 2013Document24 pagesLibdmclient FOSDEM 2013loreNo ratings yet
- Packet Tracer - TCP and UDP CommunicationsDocument7 pagesPacket Tracer - TCP and UDP CommunicationsJhohan David Contreras AragónNo ratings yet
- Java Management ExtensionsDocument9 pagesJava Management ExtensionsbrufraNo ratings yet
- What Is Rabbit MQDocument7 pagesWhat Is Rabbit MQBryan "BJ" Hoffpauir, Jr.No ratings yet
- MSI Case 1 V.0Document10 pagesMSI Case 1 V.0Dipanjan SenguptaNo ratings yet
- IPFS Based Solution For Secure File StorageDocument6 pagesIPFS Based Solution For Secure File StorageInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- OSINT Handbook 2020 (Parte 3)Document112 pagesOSINT Handbook 2020 (Parte 3)ArthurwstNo ratings yet
- Software Engineer ResumeDocument5 pagesSoftware Engineer ResumeWaqar QureshiNo ratings yet
- Notes: Introduction To Networking Monitoring and ManagementDocument12 pagesNotes: Introduction To Networking Monitoring and ManagementDevendra ChandoraNo ratings yet
- c067604 ISO IEC TR 19759 2015 PDFDocument346 pagesc067604 ISO IEC TR 19759 2015 PDFPedro PozoNo ratings yet
- Huawei Fusionsfusionsphere-Vs-Vmwarephere Vs Vmware VsphereDocument8 pagesHuawei Fusionsfusionsphere-Vs-Vmwarephere Vs Vmware Vsphereatluis82100% (1)
- CH 11Document55 pagesCH 11foxhoundzz13No ratings yet
- Apache KafkaDocument9 pagesApache KafkaYasir Mohsin KazmiNo ratings yet
- OBIEE BMM Layer Design PrinciplesDocument2 pagesOBIEE BMM Layer Design PrinciplesAmar ShirkeNo ratings yet
- Vtigercrm Mailchimp IntegrationDocument10 pagesVtigercrm Mailchimp IntegrationJeff LonGNo ratings yet
- CS 1B Lecture 3 1Document14 pagesCS 1B Lecture 3 1Val PaladoNo ratings yet
- Infographic - Public Cloud PDFDocument1 pageInfographic - Public Cloud PDFgouthamlabsNo ratings yet
- You Me IMLog V2Document47 pagesYou Me IMLog V2Bani BrneoNo ratings yet