
STSPIN820: Microstepping Management: Application Note
STSPIN820: Microstepping Management: Application Note
You might also like
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- Type 2 Coordination Chart PDFDocument3 pagesType 2 Coordination Chart PDFaravindeee08100% (9)
- 006.construction of Main ComponentsDocument17 pages006.construction of Main ComponentsGearauto PowerNo ratings yet
- Module 15: C28x Digital Motor ControlDocument41 pagesModule 15: C28x Digital Motor ControlRamana ManoharNo ratings yet
- Unit-4 Synchronous & Auto Synchronous Motor: N S N SDocument8 pagesUnit-4 Synchronous & Auto Synchronous Motor: N S N SDharamNo ratings yet
- 3-Phase Synchronous MotorDocument5 pages3-Phase Synchronous Motorabhioptimus00No ratings yet
- 2.5 Armature Reaction in DC MachinesDocument8 pages2.5 Armature Reaction in DC MachinesIshan SolankiNo ratings yet
- Chapter 4Document20 pagesChapter 4Mohammad Ali ShahNo ratings yet
- 3-Phase Induction Motor (IM) NewDocument63 pages3-Phase Induction Motor (IM) NewGauransh RajputNo ratings yet
- Synchmachine 1Document28 pagesSynchmachine 1krn260026No ratings yet
- Uee AnmDocument140 pagesUee AnmsatyaNo ratings yet
- Synchronous Machines Synchronous Machines: OutlineDocument31 pagesSynchronous Machines Synchronous Machines: Outlinesameerpatel15770No ratings yet
- Achine: Tructure Teady State Model and Basic Equations O Load Operation Ield Circuit Connections of A Machine EneratorDocument25 pagesAchine: Tructure Teady State Model and Basic Equations O Load Operation Ield Circuit Connections of A Machine EneratorAndrea VerdiNo ratings yet
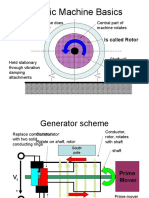
- Electric Machine Basics: Is Called Stator Is Called RotorDocument10 pagesElectric Machine Basics: Is Called Stator Is Called RotorSatrio WibowoNo ratings yet
- IT-5170 Stepper MotorDocument17 pagesIT-5170 Stepper MotorIshfaq AhmadNo ratings yet
- DIRECT CURRENT Machine MEDocument25 pagesDIRECT CURRENT Machine MEDarius MegamindNo ratings yet
- 3-EM Section 3 DC MotorDocument37 pages3-EM Section 3 DC Motormhafidz49No ratings yet
- Geometrical and Magnetic Neutral AxisDocument11 pagesGeometrical and Magnetic Neutral AxisRahman SatarNo ratings yet
- DC Machines - Section - 2018Document73 pagesDC Machines - Section - 2018Abdulrahman JaliliNo ratings yet
- Spacial Mech Unit3Document15 pagesSpacial Mech Unit3Abhishek SinghNo ratings yet
- BLDCDocument6 pagesBLDCquocyenkcdNo ratings yet
- Unit 3 PMBLDC MotorDocument14 pagesUnit 3 PMBLDC MotorSuganthiNo ratings yet
- ELECTRICITY II: Generation & DistributionDocument16 pagesELECTRICITY II: Generation & DistributionJake BrohawnNo ratings yet
- 3 Phase Induction MotorDocument19 pages3 Phase Induction MotorPJ SusonNo ratings yet
- Hyundai - Blue Print Tech Article EPS Part1Document4 pagesHyundai - Blue Print Tech Article EPS Part1Ahmed I. EltaherNo ratings yet
- Construction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsDocument5 pagesConstruction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsSew KariyawasamNo ratings yet
- UEE PPTsDocument140 pagesUEE PPTsNur CaatoNo ratings yet
- Development of A Switched Reluctance Motor Made of PermendurDocument5 pagesDevelopment of A Switched Reluctance Motor Made of PermendurNguyen ChuongNo ratings yet
- Stepper Motor NotesDocument10 pagesStepper Motor NotesArun VijayNo ratings yet
- Special Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorDocument51 pagesSpecial Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorVikash TiwariNo ratings yet
- Dual Rotor Generator Base PaperDocument4 pagesDual Rotor Generator Base Paperraja mNo ratings yet
- Chapter 4 - Induction Motor Drives - Part1Document45 pagesChapter 4 - Induction Motor Drives - Part1Zafirah HanafiNo ratings yet
- Appendix IDocument5 pagesAppendix ISƠN NGUYỄN NGỌC TRƯỜNGNo ratings yet
- As - Chapter 6 - Synchronous MachineDocument28 pagesAs - Chapter 6 - Synchronous Machinechibssa alemayehuNo ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- LN08Document9 pagesLN08ruzgaryilmazz5No ratings yet
- Module 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDocument65 pagesModule 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDeepak mishraNo ratings yet
- Sem NotesDocument189 pagesSem NotesAish KrishNo ratings yet
- Electrical MachineDocument50 pagesElectrical MachineRana AdelNo ratings yet
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Document30 pagesEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurNo ratings yet
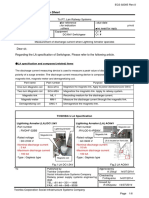
- Lightning A Srrester Pecification - EngDocument6 pagesLightning A Srrester Pecification - EngBambang GunariNo ratings yet
- EE - 3410 Electric Power: Introduction To Electric MachinesDocument30 pagesEE - 3410 Electric Power: Introduction To Electric MachinesDiyanel OriginalNo ratings yet
- Conf 4 SFD Isma2007 Tqthanh 1Document6 pagesConf 4 SFD Isma2007 Tqthanh 1THANH TRUONG QUOCNo ratings yet
- Dm00140123 Basics On The Thyristor SCR Structure and Its Application StmicroelectronicsDocument16 pagesDm00140123 Basics On The Thyristor SCR Structure and Its Application StmicroelectronicsLarry Antorveza DiazNo ratings yet
- Demagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Document2 pagesDemagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Engr M.Arshad KhalidNo ratings yet
- BLDC Motor Drive Animated PresentationDocument25 pagesBLDC Motor Drive Animated PresentationUsman HaiderNo ratings yet
- 1 DC Motor: - The Direct Current (DC) Machine Can Be Used AsDocument42 pages1 DC Motor: - The Direct Current (DC) Machine Can Be Used AsDanish KundraNo ratings yet
- L-33 (SM) (Ia&c) ( (Ee) Nptel)Document18 pagesL-33 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- (2011) Experiment M: 1. AimsDocument9 pages(2011) Experiment M: 1. AimsIbrahim ShaibuNo ratings yet
- Digital-Output Magnetic Sensor (Hall IC) : SSL0003-ANEDocument8 pagesDigital-Output Magnetic Sensor (Hall IC) : SSL0003-ANEHelder CabralNo ratings yet
- Synchmachine 1Document68 pagesSynchmachine 1Godlisten NyariNo ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- See 1307Document181 pagesSee 1307EEEDEPTGECNo ratings yet
- ) 10 ElectromagnetismDocument40 pages) 10 Electromagnetismvibhakar4u100% (1)
- Lesson 5 - StudentDocument7 pagesLesson 5 - StudentLộc SẹoNo ratings yet
- Fundamental of Electrical Engineering EMT 113/4 DC MachinesDocument64 pagesFundamental of Electrical Engineering EMT 113/4 DC Machinesluiz pauloNo ratings yet
- SteppermotorsDocument6 pagesSteppermotorsZarana BhattNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Notification - MO - Dental - 2024 Dated 5-03-2024Document1 pageNotification - MO - Dental - 2024 Dated 5-03-2024guptaamitalwNo ratings yet
- Detolla 2000Document5 pagesDetolla 2000guptaamitalwNo ratings yet
- Computer Aided Process Planning For Milling Operation: September 2016Document9 pagesComputer Aided Process Planning For Milling Operation: September 2016guptaamitalwNo ratings yet
- An Improved Minimum Error Interpolator of CNC ForDocument8 pagesAn Improved Minimum Error Interpolator of CNC ForguptaamitalwNo ratings yet
- Reference Pulse Circular Interpolators For CMC SystemsDocument6 pagesReference Pulse Circular Interpolators For CMC SystemsguptaamitalwNo ratings yet
- Molecular Basis of CancerDocument6 pagesMolecular Basis of CancerguptaamitalwNo ratings yet
- Pigmented Lesions of Oral CavityDocument41 pagesPigmented Lesions of Oral CavityguptaamitalwNo ratings yet
- DR Amit GuptaDocument33 pagesDR Amit GuptaguptaamitalwNo ratings yet
- CASE PRESENTATION NeurofibromaDocument27 pagesCASE PRESENTATION NeurofibromaguptaamitalwNo ratings yet
- ZXWR RNC (V3.12.10) Radio Network Controller Alarm and Notification Handling Reference - 548986Document26 pagesZXWR RNC (V3.12.10) Radio Network Controller Alarm and Notification Handling Reference - 548986Frans RapetsoaNo ratings yet
- Monninghoff 546 - DatasheetDocument11 pagesMonninghoff 546 - DatasheetirfannadineNo ratings yet
- Wachemo University DEPARTEMENT OF Electrical and Computer Engineering School of Post GraduatesDocument26 pagesWachemo University DEPARTEMENT OF Electrical and Computer Engineering School of Post GraduatesMitikuNo ratings yet
- 1 General Information: Nettime Timestamp of The Position and Trigger TimeDocument51 pages1 General Information: Nettime Timestamp of The Position and Trigger TimeСтив АааNo ratings yet
- Ecs 648fx Sf1 Rev 1.0Document34 pagesEcs 648fx Sf1 Rev 1.0cortes920No ratings yet
- Training Booklet 2013 PDFDocument24 pagesTraining Booklet 2013 PDFoyahgrbjijgv bn100% (1)
- Lecture 5: General Purpose I/O: ECEN442 DSP Based Electromechanical Motion Control Spring 2014Document28 pagesLecture 5: General Purpose I/O: ECEN442 DSP Based Electromechanical Motion Control Spring 2014William HuangNo ratings yet
- Samsung CLP 600 Series Service ManualDocument254 pagesSamsung CLP 600 Series Service ManualwcualumniNo ratings yet
- Signalink USBDocument13 pagesSignalink USBAnonymous jTPeOa9DNo ratings yet
- ST MIX Manual v1 - 00Document5 pagesST MIX Manual v1 - 00bNo ratings yet
- MAGALSENSTAR fps2Document4 pagesMAGALSENSTAR fps2Manuale_Sevill_1537No ratings yet
- ACS880 DC/DC Converter Control Program: Firmware ManualDocument210 pagesACS880 DC/DC Converter Control Program: Firmware ManualKechaouNo ratings yet
- Paper Enhanced FracN PLL PN ModellingDocument17 pagesPaper Enhanced FracN PLL PN ModellingSalali 15No ratings yet
- Iec 60287-1-1Document44 pagesIec 60287-1-1Jose Giraldo100% (1)
- Acer Extensa 4220 4620 - WISTRON BIWA - POWER SEQUENCE PDFDocument1 pageAcer Extensa 4220 4620 - WISTRON BIWA - POWER SEQUENCE PDFLas DusNo ratings yet
- HM30 User Manual en v1.2Document90 pagesHM30 User Manual en v1.2Taabr XanaNo ratings yet
- Illuminated Living Room Keyboard k830 Setup GuideDocument20 pagesIlluminated Living Room Keyboard k830 Setup GuidedoranlucaNo ratings yet
- Manual Televisión TrinitronDocument76 pagesManual Televisión TrinitronAlejandro Lara DNo ratings yet
- ATH-SR30BT Audiotechnica ManualDocument15 pagesATH-SR30BT Audiotechnica ManualSuraj MadhavNo ratings yet
- Texas Ranger TR-966 Owners ManualDocument11 pagesTexas Ranger TR-966 Owners ManualbellscbNo ratings yet
- AnExperiment On CmosDocument10 pagesAnExperiment On CmosVinny VenizNo ratings yet
- RJ 45 Vs RJ11Document2 pagesRJ 45 Vs RJ11hasbi fadliNo ratings yet
- Relay Output Module SM 322 DO 8 X Rel. AC 230 V/5 A (6ES7322-1HF10-0AA0)Document6 pagesRelay Output Module SM 322 DO 8 X Rel. AC 230 V/5 A (6ES7322-1HF10-0AA0)Fabio CavalheiroNo ratings yet
- Astm E1328 - 1 (En)Document2 pagesAstm E1328 - 1 (En)Rahul SamalaNo ratings yet
- Li-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCDocument17 pagesLi-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCJhoanie Marie Cauan100% (1)
- How Ethernet WorksDocument9 pagesHow Ethernet Worksapi-19737301No ratings yet
- Design & Development Of: On Wireless Accident Information System Using Gps & GSMDocument16 pagesDesign & Development Of: On Wireless Accident Information System Using Gps & GSMEmranur RahmanNo ratings yet
- Focusmart25.6-100 SpecificationDocument6 pagesFocusmart25.6-100 Specificationmna478No ratings yet
- TPE 40-230/2-S 3 380-480 DN 40 9 15 1960 On RequestDocument13 pagesTPE 40-230/2-S 3 380-480 DN 40 9 15 1960 On RequestbassouadNo ratings yet






























































































Download as pdf or txt
You might also like
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- Type 2 Coordination Chart PDFDocument3 pagesType 2 Coordination Chart PDFaravindeee08100% (9)
- 006.construction of Main ComponentsDocument17 pages006.construction of Main ComponentsGearauto PowerNo ratings yet
- Module 15: C28x Digital Motor ControlDocument41 pagesModule 15: C28x Digital Motor ControlRamana ManoharNo ratings yet
- Unit-4 Synchronous & Auto Synchronous Motor: N S N SDocument8 pagesUnit-4 Synchronous & Auto Synchronous Motor: N S N SDharamNo ratings yet
- 3-Phase Synchronous MotorDocument5 pages3-Phase Synchronous Motorabhioptimus00No ratings yet
- 2.5 Armature Reaction in DC MachinesDocument8 pages2.5 Armature Reaction in DC MachinesIshan SolankiNo ratings yet
- Chapter 4Document20 pagesChapter 4Mohammad Ali ShahNo ratings yet
- 3-Phase Induction Motor (IM) NewDocument63 pages3-Phase Induction Motor (IM) NewGauransh RajputNo ratings yet
- Synchmachine 1Document28 pagesSynchmachine 1krn260026No ratings yet
- Uee AnmDocument140 pagesUee AnmsatyaNo ratings yet
- Synchronous Machines Synchronous Machines: OutlineDocument31 pagesSynchronous Machines Synchronous Machines: Outlinesameerpatel15770No ratings yet
- Achine: Tructure Teady State Model and Basic Equations O Load Operation Ield Circuit Connections of A Machine EneratorDocument25 pagesAchine: Tructure Teady State Model and Basic Equations O Load Operation Ield Circuit Connections of A Machine EneratorAndrea VerdiNo ratings yet
- Electric Machine Basics: Is Called Stator Is Called RotorDocument10 pagesElectric Machine Basics: Is Called Stator Is Called RotorSatrio WibowoNo ratings yet
- IT-5170 Stepper MotorDocument17 pagesIT-5170 Stepper MotorIshfaq AhmadNo ratings yet
- DIRECT CURRENT Machine MEDocument25 pagesDIRECT CURRENT Machine MEDarius MegamindNo ratings yet
- 3-EM Section 3 DC MotorDocument37 pages3-EM Section 3 DC Motormhafidz49No ratings yet
- Geometrical and Magnetic Neutral AxisDocument11 pagesGeometrical and Magnetic Neutral AxisRahman SatarNo ratings yet
- DC Machines - Section - 2018Document73 pagesDC Machines - Section - 2018Abdulrahman JaliliNo ratings yet
- Spacial Mech Unit3Document15 pagesSpacial Mech Unit3Abhishek SinghNo ratings yet
- BLDCDocument6 pagesBLDCquocyenkcdNo ratings yet
- Unit 3 PMBLDC MotorDocument14 pagesUnit 3 PMBLDC MotorSuganthiNo ratings yet
- ELECTRICITY II: Generation & DistributionDocument16 pagesELECTRICITY II: Generation & DistributionJake BrohawnNo ratings yet
- 3 Phase Induction MotorDocument19 pages3 Phase Induction MotorPJ SusonNo ratings yet
- Hyundai - Blue Print Tech Article EPS Part1Document4 pagesHyundai - Blue Print Tech Article EPS Part1Ahmed I. EltaherNo ratings yet
- Construction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsDocument5 pagesConstruction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsSew KariyawasamNo ratings yet
- UEE PPTsDocument140 pagesUEE PPTsNur CaatoNo ratings yet
- Development of A Switched Reluctance Motor Made of PermendurDocument5 pagesDevelopment of A Switched Reluctance Motor Made of PermendurNguyen ChuongNo ratings yet
- Stepper Motor NotesDocument10 pagesStepper Motor NotesArun VijayNo ratings yet
- Special Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorDocument51 pagesSpecial Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorVikash TiwariNo ratings yet
- Dual Rotor Generator Base PaperDocument4 pagesDual Rotor Generator Base Paperraja mNo ratings yet
- Chapter 4 - Induction Motor Drives - Part1Document45 pagesChapter 4 - Induction Motor Drives - Part1Zafirah HanafiNo ratings yet
- Appendix IDocument5 pagesAppendix ISƠN NGUYỄN NGỌC TRƯỜNGNo ratings yet
- As - Chapter 6 - Synchronous MachineDocument28 pagesAs - Chapter 6 - Synchronous Machinechibssa alemayehuNo ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- LN08Document9 pagesLN08ruzgaryilmazz5No ratings yet
- Module 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDocument65 pagesModule 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDeepak mishraNo ratings yet
- Sem NotesDocument189 pagesSem NotesAish KrishNo ratings yet
- Electrical MachineDocument50 pagesElectrical MachineRana AdelNo ratings yet
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Document30 pagesEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurNo ratings yet
- Lightning A Srrester Pecification - EngDocument6 pagesLightning A Srrester Pecification - EngBambang GunariNo ratings yet
- EE - 3410 Electric Power: Introduction To Electric MachinesDocument30 pagesEE - 3410 Electric Power: Introduction To Electric MachinesDiyanel OriginalNo ratings yet
- Conf 4 SFD Isma2007 Tqthanh 1Document6 pagesConf 4 SFD Isma2007 Tqthanh 1THANH TRUONG QUOCNo ratings yet
- Dm00140123 Basics On The Thyristor SCR Structure and Its Application StmicroelectronicsDocument16 pagesDm00140123 Basics On The Thyristor SCR Structure and Its Application StmicroelectronicsLarry Antorveza DiazNo ratings yet
- Demagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Document2 pagesDemagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Engr M.Arshad KhalidNo ratings yet
- BLDC Motor Drive Animated PresentationDocument25 pagesBLDC Motor Drive Animated PresentationUsman HaiderNo ratings yet
- 1 DC Motor: - The Direct Current (DC) Machine Can Be Used AsDocument42 pages1 DC Motor: - The Direct Current (DC) Machine Can Be Used AsDanish KundraNo ratings yet
- L-33 (SM) (Ia&c) ( (Ee) Nptel)Document18 pagesL-33 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- (2011) Experiment M: 1. AimsDocument9 pages(2011) Experiment M: 1. AimsIbrahim ShaibuNo ratings yet
- Digital-Output Magnetic Sensor (Hall IC) : SSL0003-ANEDocument8 pagesDigital-Output Magnetic Sensor (Hall IC) : SSL0003-ANEHelder CabralNo ratings yet
- Synchmachine 1Document68 pagesSynchmachine 1Godlisten NyariNo ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- See 1307Document181 pagesSee 1307EEEDEPTGECNo ratings yet
- ) 10 ElectromagnetismDocument40 pages) 10 Electromagnetismvibhakar4u100% (1)
- Lesson 5 - StudentDocument7 pagesLesson 5 - StudentLộc SẹoNo ratings yet
- Fundamental of Electrical Engineering EMT 113/4 DC MachinesDocument64 pagesFundamental of Electrical Engineering EMT 113/4 DC Machinesluiz pauloNo ratings yet
- SteppermotorsDocument6 pagesSteppermotorsZarana BhattNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Notification - MO - Dental - 2024 Dated 5-03-2024Document1 pageNotification - MO - Dental - 2024 Dated 5-03-2024guptaamitalwNo ratings yet
- Detolla 2000Document5 pagesDetolla 2000guptaamitalwNo ratings yet
- Computer Aided Process Planning For Milling Operation: September 2016Document9 pagesComputer Aided Process Planning For Milling Operation: September 2016guptaamitalwNo ratings yet
- An Improved Minimum Error Interpolator of CNC ForDocument8 pagesAn Improved Minimum Error Interpolator of CNC ForguptaamitalwNo ratings yet
- Reference Pulse Circular Interpolators For CMC SystemsDocument6 pagesReference Pulse Circular Interpolators For CMC SystemsguptaamitalwNo ratings yet
- Molecular Basis of CancerDocument6 pagesMolecular Basis of CancerguptaamitalwNo ratings yet
- Pigmented Lesions of Oral CavityDocument41 pagesPigmented Lesions of Oral CavityguptaamitalwNo ratings yet
- DR Amit GuptaDocument33 pagesDR Amit GuptaguptaamitalwNo ratings yet
- CASE PRESENTATION NeurofibromaDocument27 pagesCASE PRESENTATION NeurofibromaguptaamitalwNo ratings yet
- ZXWR RNC (V3.12.10) Radio Network Controller Alarm and Notification Handling Reference - 548986Document26 pagesZXWR RNC (V3.12.10) Radio Network Controller Alarm and Notification Handling Reference - 548986Frans RapetsoaNo ratings yet
- Monninghoff 546 - DatasheetDocument11 pagesMonninghoff 546 - DatasheetirfannadineNo ratings yet
- Wachemo University DEPARTEMENT OF Electrical and Computer Engineering School of Post GraduatesDocument26 pagesWachemo University DEPARTEMENT OF Electrical and Computer Engineering School of Post GraduatesMitikuNo ratings yet
- 1 General Information: Nettime Timestamp of The Position and Trigger TimeDocument51 pages1 General Information: Nettime Timestamp of The Position and Trigger TimeСтив АааNo ratings yet
- Ecs 648fx Sf1 Rev 1.0Document34 pagesEcs 648fx Sf1 Rev 1.0cortes920No ratings yet
- Training Booklet 2013 PDFDocument24 pagesTraining Booklet 2013 PDFoyahgrbjijgv bn100% (1)
- Lecture 5: General Purpose I/O: ECEN442 DSP Based Electromechanical Motion Control Spring 2014Document28 pagesLecture 5: General Purpose I/O: ECEN442 DSP Based Electromechanical Motion Control Spring 2014William HuangNo ratings yet
- Samsung CLP 600 Series Service ManualDocument254 pagesSamsung CLP 600 Series Service ManualwcualumniNo ratings yet
- Signalink USBDocument13 pagesSignalink USBAnonymous jTPeOa9DNo ratings yet
- ST MIX Manual v1 - 00Document5 pagesST MIX Manual v1 - 00bNo ratings yet
- MAGALSENSTAR fps2Document4 pagesMAGALSENSTAR fps2Manuale_Sevill_1537No ratings yet
- ACS880 DC/DC Converter Control Program: Firmware ManualDocument210 pagesACS880 DC/DC Converter Control Program: Firmware ManualKechaouNo ratings yet
- Paper Enhanced FracN PLL PN ModellingDocument17 pagesPaper Enhanced FracN PLL PN ModellingSalali 15No ratings yet
- Iec 60287-1-1Document44 pagesIec 60287-1-1Jose Giraldo100% (1)
- Acer Extensa 4220 4620 - WISTRON BIWA - POWER SEQUENCE PDFDocument1 pageAcer Extensa 4220 4620 - WISTRON BIWA - POWER SEQUENCE PDFLas DusNo ratings yet
- HM30 User Manual en v1.2Document90 pagesHM30 User Manual en v1.2Taabr XanaNo ratings yet
- Illuminated Living Room Keyboard k830 Setup GuideDocument20 pagesIlluminated Living Room Keyboard k830 Setup GuidedoranlucaNo ratings yet
- Manual Televisión TrinitronDocument76 pagesManual Televisión TrinitronAlejandro Lara DNo ratings yet
- ATH-SR30BT Audiotechnica ManualDocument15 pagesATH-SR30BT Audiotechnica ManualSuraj MadhavNo ratings yet
- Texas Ranger TR-966 Owners ManualDocument11 pagesTexas Ranger TR-966 Owners ManualbellscbNo ratings yet
- AnExperiment On CmosDocument10 pagesAnExperiment On CmosVinny VenizNo ratings yet
- RJ 45 Vs RJ11Document2 pagesRJ 45 Vs RJ11hasbi fadliNo ratings yet
- Relay Output Module SM 322 DO 8 X Rel. AC 230 V/5 A (6ES7322-1HF10-0AA0)Document6 pagesRelay Output Module SM 322 DO 8 X Rel. AC 230 V/5 A (6ES7322-1HF10-0AA0)Fabio CavalheiroNo ratings yet
- Astm E1328 - 1 (En)Document2 pagesAstm E1328 - 1 (En)Rahul SamalaNo ratings yet
- Li-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCDocument17 pagesLi-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCJhoanie Marie Cauan100% (1)
- How Ethernet WorksDocument9 pagesHow Ethernet Worksapi-19737301No ratings yet
- Design & Development Of: On Wireless Accident Information System Using Gps & GSMDocument16 pagesDesign & Development Of: On Wireless Accident Information System Using Gps & GSMEmranur RahmanNo ratings yet
- Focusmart25.6-100 SpecificationDocument6 pagesFocusmart25.6-100 Specificationmna478No ratings yet
- TPE 40-230/2-S 3 380-480 DN 40 9 15 1960 On RequestDocument13 pagesTPE 40-230/2-S 3 380-480 DN 40 9 15 1960 On RequestbassouadNo ratings yet