Download as pdf or txt
You might also like
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- Partes Voluson 730 Expert BT05 ServiceDocument2 pagesPartes Voluson 730 Expert BT05 ServiceHectorOCNo ratings yet
- X4 Amplifier Platform: Keep This Manual For Future Reference ©2018 Powersoft Powersoft - X4 - Servman - en - v2.5Document61 pagesX4 Amplifier Platform: Keep This Manual For Future Reference ©2018 Powersoft Powersoft - X4 - Servman - en - v2.5Dirson Volmir WilligNo ratings yet
- En - STM32G4-WDG TIMERS-General Purpose Timer GPTIMDocument91 pagesEn - STM32G4-WDG TIMERS-General Purpose Timer GPTIMnorbertscribdNo ratings yet
- En - stm32f7 WDG Timers GptimDocument61 pagesEn - stm32f7 WDG Timers GptimLODELBARRIO RDNo ratings yet
- En - stm32l4 WDG Timers GptimDocument64 pagesEn - stm32l4 WDG Timers GptimGia LữNo ratings yet
- PCF8523Document14 pagesPCF8523Cosmin AndreiNo ratings yet
- Lecture 12 8051 Timer Programing v2Document22 pagesLecture 12 8051 Timer Programing v2Faisal Bin Abdur Rahman 1912038642No ratings yet
- Setup and Use The AVR® TimersDocument16 pagesSetup and Use The AVR® Timersmike_helplineNo ratings yet
- Lesson 14Document18 pagesLesson 14satsoexNo ratings yet
- Micro Controller Based School TimerDocument5 pagesMicro Controller Based School Timera_kureelNo ratings yet
- STM32 Timers 5.haftaDocument25 pagesSTM32 Timers 5.haftagorgulu buzNo ratings yet
- Time Operated Electrical Appliance Control SystemDocument82 pagesTime Operated Electrical Appliance Control Systempoozu100% (1)
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocument8 pagesAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNo ratings yet
- Flextimer and Adc Synchronization For Field Oriented Control On KinetisDocument11 pagesFlextimer and Adc Synchronization For Field Oriented Control On KinetisElias CarvalhoNo ratings yet
- MCF51EM256 Anti Tamper Features: A Leap Towards Robust Smart Metering SolutionsDocument3 pagesMCF51EM256 Anti Tamper Features: A Leap Towards Robust Smart Metering SolutionsFrancois EcholsNo ratings yet
- 8051 Microcontroller (2 Marks - Question Bank)Document13 pages8051 Microcontroller (2 Marks - Question Bank)Dr. N.Shanmugasundaram97% (34)
- Real Timer Using Microcontroller ATME8535Document4 pagesReal Timer Using Microcontroller ATME8535Emin KültürelNo ratings yet
- Unit Iii Motorola 68HC11 ArchitectureDocument25 pagesUnit Iii Motorola 68HC11 ArchitectureAishwarya DinakaranNo ratings yet
- Automatic College Bell REPORTDocument34 pagesAutomatic College Bell REPORTNagraj Tondchore50% (2)
- Sholihul Atmega16 PDFDocument13 pagesSholihul Atmega16 PDFnbbudionoNo ratings yet
- Unit 5Document52 pagesUnit 5mir xahidNo ratings yet
- Lab 7 - TimersDocument6 pagesLab 7 - Timersjnfgames1No ratings yet
- 06119397Document6 pages06119397bpd21No ratings yet
- LPC2148 TimersDocument4 pagesLPC2148 TimersAnand BhaskarNo ratings yet
- 06 - Timer With PWM PDFDocument14 pages06 - Timer With PWM PDFSrikanth MahanthiNo ratings yet
- Sms Based Stepper Motor ControlDocument15 pagesSms Based Stepper Motor ControlSagar CoolkarniNo ratings yet
- MM Lab ManualDocument53 pagesMM Lab ManualDev SejvaniNo ratings yet
- User Guide 08092: IRMCS3043 System Overview/GuideDocument14 pagesUser Guide 08092: IRMCS3043 System Overview/GuidePedro Leandro SilvaNo ratings yet
- Chapt7 1Document43 pagesChapt7 1Prasanna KumarNo ratings yet
- User Guide 08092: IRMCS3043 System Overview/GuideDocument14 pagesUser Guide 08092: IRMCS3043 System Overview/GuidePedro Leandro SilvaNo ratings yet
- SMS Based Energy Meter MonitoringDocument6 pagesSMS Based Energy Meter MonitoringNarayan Singh WaraichNo ratings yet
- Atmel PWM Fan ControlDocument10 pagesAtmel PWM Fan ControlArijan BogovićNo ratings yet
- Design and Implementation of 8-Bit RISC MCUDocument4 pagesDesign and Implementation of 8-Bit RISC MCUibzz1982No ratings yet
- TMS320F2812 - Event ManagerDocument52 pagesTMS320F2812 - Event ManagerPantech ProLabs India Pvt LtdNo ratings yet
- AN2687Document48 pagesAN2687ExpplusNo ratings yet
- CHP 3 - Pic Timer Programming in CDocument12 pagesCHP 3 - Pic Timer Programming in CTajuddin Razali100% (1)
- Microcontroller-Based Multiple-Platform PWM Signal Generation Procedures For Industrial UseDocument6 pagesMicrocontroller-Based Multiple-Platform PWM Signal Generation Procedures For Industrial UseVladimir VasilcinNo ratings yet
- Speed Detector For HighwaysDocument29 pagesSpeed Detector For HighwaysShama MahinNo ratings yet
- Timers HuangDocument21 pagesTimers HuangBhim Vandana100% (1)
- Course Material-MSP430 For Automatic ControlDocument42 pagesCourse Material-MSP430 For Automatic ControlOgunranti RasaqNo ratings yet
- Experiment #6 Input / Output DesignDocument11 pagesExperiment #6 Input / Output DesignFelipe DiasNo ratings yet
- IRMCS3041 System Overview & Guide - RD - Irmcs3041Document14 pagesIRMCS3041 System Overview & Guide - RD - Irmcs3041shivguptaNo ratings yet
- Remote Digital ClockDocument79 pagesRemote Digital ClockArdhika Dhennis Putra AnandaNo ratings yet
- Assignment AutomationDocument6 pagesAssignment AutomationNAAZNo ratings yet
- GSM Based Home Security SystemDocument52 pagesGSM Based Home Security SystemCheedella Subbarao100% (1)
- Micro ControllerDocument26 pagesMicro Controllerraj_vis321No ratings yet
- Automatic Room Light Controller With Bidirectional Visitor CounterDocument37 pagesAutomatic Room Light Controller With Bidirectional Visitor Counteramysure150% (2)
- GSM Based Automatic Electricity Billing SystemDocument6 pagesGSM Based Automatic Electricity Billing SystemIJARTETNo ratings yet
- Chapter 1.1Document113 pagesChapter 1.1Sathish VudugundlaNo ratings yet
- Makalah Line Tracking Robot (By Opick Hidayato)Document36 pagesMakalah Line Tracking Robot (By Opick Hidayato)Opick HidayatoNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsFrom EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- TB67S128FTG Datasheet en 20201215Document49 pagesTB67S128FTG Datasheet en 20201215EdsonNo ratings yet
- Generalized Blockmodeling: October 1999Document11 pagesGeneralized Blockmodeling: October 1999EdsonNo ratings yet
- Digital Servo Motion ControlDocument25 pagesDigital Servo Motion ControlEdsonNo ratings yet
- Zero Offset and Reference PointsDocument10 pagesZero Offset and Reference PointsEdsonNo ratings yet
- Ultrasonic Sensing BasicsDocument15 pagesUltrasonic Sensing BasicsEdsonNo ratings yet
- Servo Technology Guide - ABDocument247 pagesServo Technology Guide - ABEdsonNo ratings yet
- Solutions For Drive TechnologyDocument36 pagesSolutions For Drive TechnologyEdsonNo ratings yet
- Basic Math For CNCDocument10 pagesBasic Math For CNCEdsonNo ratings yet
- Application Note Isolation Technique For Signal ConditioningDocument7 pagesApplication Note Isolation Technique For Signal ConditioningEdsonNo ratings yet
- IEEE ITSC 2021 CFP v1Document1 pageIEEE ITSC 2021 CFP v1EdsonNo ratings yet
- TMC2209 Datasheet V105Document83 pagesTMC2209 Datasheet V105EdsonNo ratings yet
- Direct Digital Control of Electronic Unit InjectorsDocument12 pagesDirect Digital Control of Electronic Unit InjectorsEdsonNo ratings yet
- National - Automotive - Solutions AutomotiveDocument32 pagesNational - Automotive - Solutions AutomotiveEdsonNo ratings yet
- Microprocessor-Based Control of Engine Valve TimingDocument5 pagesMicroprocessor-Based Control of Engine Valve TimingEdsonNo ratings yet
- Magneti Marelli g5 g6 IntDocument4 pagesMagneti Marelli g5 g6 IntEdsonNo ratings yet
- Engine Controls and Fuel Systems: Alternative Code Retrieval Procedure For Ford Eec Iv SystemsDocument4 pagesEngine Controls and Fuel Systems: Alternative Code Retrieval Procedure For Ford Eec Iv SystemsEdsonNo ratings yet
- Electromagnetic Theory & Transmission Lines: Maulana Abul Kalam Azad University OF Technology, West BengalDocument7 pagesElectromagnetic Theory & Transmission Lines: Maulana Abul Kalam Azad University OF Technology, West Bengalsomething creativeNo ratings yet
- Name: Muhammad Usama Reg: 796-FET/BSME/F18 Assignment Week 10 Course Title: Electronics Engineering (Ee-201)Document6 pagesName: Muhammad Usama Reg: 796-FET/BSME/F18 Assignment Week 10 Course Title: Electronics Engineering (Ee-201)Usama GulzarNo ratings yet
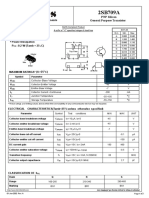
- Transistor PNP 2SB709 TV SonyDocument3 pagesTransistor PNP 2SB709 TV SonyJose PerezNo ratings yet
- Carvin CX800, CX1200 SchematicDocument1 pageCarvin CX800, CX1200 Schematicttnaing100% (3)
- Tda 2005Document21 pagesTda 2005Vamsi Mani Deep ElapakurtyNo ratings yet
- Engineering Engineering Manual For DriveDocument265 pagesEngineering Engineering Manual For Driverichard zerpaNo ratings yet
- Digital Thermometer With LED - LCD DisplayDocument6 pagesDigital Thermometer With LED - LCD Displaymohamed lamine elbiskriNo ratings yet
- Difference Between Multiplexing and Multiple Access TechniquesDocument3 pagesDifference Between Multiplexing and Multiple Access TechniquesSameerUsmaniNo ratings yet
- 02 Scilab and VisSim PDFDocument7 pages02 Scilab and VisSim PDFToànNguyễnKhánhNo ratings yet
- Digital Multimeters/Clamp Meters/Voltage and Continuity TestersDocument1 pageDigital Multimeters/Clamp Meters/Voltage and Continuity TestersMarco CornelioNo ratings yet
- Denver Inst Analytical Balances M-Series Operation ManualDocument29 pagesDenver Inst Analytical Balances M-Series Operation ManualRichard BedellNo ratings yet
- Guide To LTE Neighboring Cell PDFDocument132 pagesGuide To LTE Neighboring Cell PDFAmmar DawoodNo ratings yet
- (Surface Mounted Downlight) : Drawing & Dimension Photometric ResultDocument1 page(Surface Mounted Downlight) : Drawing & Dimension Photometric ResultDaniel NasutionNo ratings yet
- Embedded Real Time SystemDocument12 pagesEmbedded Real Time SystemKottai eswariNo ratings yet
- AC-525 Hardware Installation and User Guide 180608Document52 pagesAC-525 Hardware Installation and User Guide 180608Ulises González SeguraNo ratings yet
- V600-63SM Vacuum Unit Quotation20200410en PDFDocument1 pageV600-63SM Vacuum Unit Quotation20200410en PDFAditheya Varthan MNo ratings yet
- Basic Electronics: Semiconductor Diode & Its ApplicationsDocument36 pagesBasic Electronics: Semiconductor Diode & Its ApplicationsRana AhmedNo ratings yet
- Introduction To Wireless Network EquipmentDocument291 pagesIntroduction To Wireless Network EquipmentMesfin TibebeNo ratings yet
- Intellian v85nx User ManualDocument105 pagesIntellian v85nx User ManualAsad VakiliNo ratings yet
- McIntosh MAC-4200 Owners ManualDocument28 pagesMcIntosh MAC-4200 Owners ManualSaleem AhmadNo ratings yet
- AccesoDocument4 pagesAccesoerazorafaelNo ratings yet
- USARTDocument13 pagesUSARTkaushikei22No ratings yet
- Satellite Pro C840-SP4225KLDocument3 pagesSatellite Pro C840-SP4225KLsafang lifungNo ratings yet
- Power Splitter 08Document3 pagesPower Splitter 08Umar KhanNo ratings yet
- Viper Filmstream Camera System: Venom FlashpackDocument6 pagesViper Filmstream Camera System: Venom FlashpackbfantiniNo ratings yet
- Trafo Kering - Schneider PDFDocument4 pagesTrafo Kering - Schneider PDFHikmiahNo ratings yet
- QG40N KDXYh 080 ASP CM UL 1cDocument3 pagesQG40N KDXYh 080 ASP CM UL 1cmehmetNo ratings yet
- MPX5700Document11 pagesMPX5700frederypsNo ratings yet