Download as pdf or txt
You might also like
- Build A Programmable Mechanical Music BoxDocument21 pagesBuild A Programmable Mechanical Music BoxHua Hidari YangNo ratings yet
- Shen Acoustics Ancient Chinese Bells Sciam 1987Document10 pagesShen Acoustics Ancient Chinese Bells Sciam 1987Hua Hidari YangNo ratings yet
- B1-Preliminary-Posters 2020 PDFDocument3 pagesB1-Preliminary-Posters 2020 PDFalbertoygemmaNo ratings yet
- GR-TIEMS Operation Manual (6F2M1082) 0.04Document282 pagesGR-TIEMS Operation Manual (6F2M1082) 0.04iqbal100% (3)
- Syslog MessagesDocument956 pagesSyslog MessagesasbandaraNo ratings yet
- Bearing Fault OrmanPID3948477Document6 pagesBearing Fault OrmanPID3948477kNo ratings yet
- ABB Condition Monitoring of Electric Motors Based On MagnetometerDocument5 pagesABB Condition Monitoring of Electric Motors Based On MagnetometerHamilton Fábio BorgesNo ratings yet
- A Software Video Stabilization System For Automotive Oriented ApplicationsDocument6 pagesA Software Video Stabilization System For Automotive Oriented Applicationspavan kumar sharmaNo ratings yet
- InTech-Automatic Optical Inspection of SolderingDocument56 pagesInTech-Automatic Optical Inspection of SolderingTeoTyJayNo ratings yet
- Acoustic Camera Brochure2009Document20 pagesAcoustic Camera Brochure2009jgcalocaNo ratings yet
- Automated Seam Tracking System Based On Passive Monocular Vision For Automated Linear Robotic Welding ProcessDocument3 pagesAutomated Seam Tracking System Based On Passive Monocular Vision For Automated Linear Robotic Welding ProcessMihail AvramovNo ratings yet
- Automated X-Ray Inspection Robot: Enhancing Quality Control Through Computer VisionFrom EverandAutomated X-Ray Inspection Robot: Enhancing Quality Control Through Computer VisionNo ratings yet
- Low Cost Vibration Sensor For ConditionDocument4 pagesLow Cost Vibration Sensor For ConditionVinu GNo ratings yet
- Innovate T5Document14 pagesInnovate T5oambesi100% (1)
- Automated Vision Inspection of Critical Steel Components Based On Signal Analysis Extracted Form ImagesDocument4 pagesAutomated Vision Inspection of Critical Steel Components Based On Signal Analysis Extracted Form ImagesMatteo LanciniNo ratings yet
- Nde Development For Bonded Honeycomb Structures Produced Using Non-Autoclave Manufacturing ProcessesDocument15 pagesNde Development For Bonded Honeycomb Structures Produced Using Non-Autoclave Manufacturing ProcessesSebastian AndreoliNo ratings yet
- 2003 Development20of20X-ray20ScannerDocument7 pages2003 Development20of20X-ray20ScannerBABLU TIWARINo ratings yet
- ANew Passive MethodologyDocument10 pagesANew Passive MethodologyLiju DanielNo ratings yet
- US Online MonitoringDocument9 pagesUS Online MonitoringYizz K.No ratings yet
- Vibration Analysis For IoT Enabled Predictive MaintenanceDocument12 pagesVibration Analysis For IoT Enabled Predictive MaintenanceKleber VieiraNo ratings yet
- Electronics 10 02329 v2Document23 pagesElectronics 10 02329 v2v84pjfghnsNo ratings yet
- A Low-Cost Robotic System For The Efficient Visual Inspection of TunnelsDocument8 pagesA Low-Cost Robotic System For The Efficient Visual Inspection of TunnelsmojeebmashalNo ratings yet
- Acoustic Camera. Listening With Your Eyes.: The OriginalDocument20 pagesAcoustic Camera. Listening With Your Eyes.: The OriginalTatianaNo ratings yet
- Testing of A Reliability of SRF02 Ultrasonic DetectorsDocument8 pagesTesting of A Reliability of SRF02 Ultrasonic DetectorsRGFENo ratings yet
- Indoor Positioning: Bluetooth Angle of ArrivalDocument79 pagesIndoor Positioning: Bluetooth Angle of ArrivalPablo D. RigoNo ratings yet
- An Innovative SCMOS Based Autonomous AstronomicalDocument6 pagesAn Innovative SCMOS Based Autonomous AstronomicalWolf JohnNo ratings yet
- An Adaptive Stripe Noise Removal Algorithm For Optical Satellite ImageryDocument7 pagesAn Adaptive Stripe Noise Removal Algorithm For Optical Satellite Imageryaya__ayakNo ratings yet
- Acoustic Diagnostics of Electrical Origin Fault Modes With Readily Available ConsumerGrade Sensors-2019Document9 pagesAcoustic Diagnostics of Electrical Origin Fault Modes With Readily Available ConsumerGrade Sensors-2019M yNo ratings yet
- H2S & Total Sulfur AnalyzersDocument16 pagesH2S & Total Sulfur AnalyzersBryan TungNo ratings yet
- 2013 SENSORCOMM Early-Warning System For Machine FailureDocument7 pages2013 SENSORCOMM Early-Warning System For Machine FailureLuqman AzamNo ratings yet
- Accelerating Ultrasonic Fingerprint SensorDocument8 pagesAccelerating Ultrasonic Fingerprint SensorElvis JoelNo ratings yet
- Intelligent Adaptive Filtering Algorithm For Electromagnetic-Radiation Field TestingDocument16 pagesIntelligent Adaptive Filtering Algorithm For Electromagnetic-Radiation Field TestingBerkay CalıskanNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- System Analysis of A Fully-Integrated Capacitive Angular SensorDocument6 pagesSystem Analysis of A Fully-Integrated Capacitive Angular SensormehdiNo ratings yet
- Hnicem 2014 7016245Document6 pagesHnicem 2014 7016245Thành NguyễnNo ratings yet
- SMI Acoustic Cam IntroductionDocument20 pagesSMI Acoustic Cam IntroductionJohn DoeNo ratings yet
- Image Processing To Automate Condition Assessment of Overhead Line ComponentsDocument6 pagesImage Processing To Automate Condition Assessment of Overhead Line Componentswai_li_8No ratings yet
- Efficient Sensor Signal Filtering For Autonomous Wireless NodesDocument9 pagesEfficient Sensor Signal Filtering For Autonomous Wireless NodesThenappan SNo ratings yet
- Ventrac TestDocument2 pagesVentrac TestKiran KumarNo ratings yet
- Ijet V3i6p59Document6 pagesIjet V3i6p59International Journal of Engineering and TechniquesNo ratings yet
- Three Phase Induction Motor Incipient Rotors FaulDocument8 pagesThree Phase Induction Motor Incipient Rotors FaulShadNo ratings yet
- Imp A Real Case of Significant Scan Test Cost ReductionDocument6 pagesImp A Real Case of Significant Scan Test Cost Reductionaniruddh singhNo ratings yet
- Poster ws2013 Ang1Document2 pagesPoster ws2013 Ang1Caio FlemingNo ratings yet
- Low Cost and Efficient Power Quality AnalyzerDocument10 pagesLow Cost and Efficient Power Quality Analyzeraoc2000No ratings yet
- Useful InfoDocument10 pagesUseful Infojivashi mNo ratings yet
- Abstracts / JSAE Review 18 (1997) 185-209Document1 pageAbstracts / JSAE Review 18 (1997) 185-209Dhawadi MahdiNo ratings yet
- Design of Low-Cost Noise Measurement Sensor Network Sensor Function Design PDFDocument8 pagesDesign of Low-Cost Noise Measurement Sensor Network Sensor Function Design PDFFrew FrewNo ratings yet
- Doctorknow Application Paper: About The AuthorDocument9 pagesDoctorknow Application Paper: About The AuthorLake HouseNo ratings yet
- Investigate Robot With Remote Surveillance System, Metaldetector&Speed Control Using Zigbee&ArduinoDocument8 pagesInvestigate Robot With Remote Surveillance System, Metaldetector&Speed Control Using Zigbee&ArduinoSahana SatishNo ratings yet
- In Process Monitoring of Porosity During LaserDocument30 pagesIn Process Monitoring of Porosity During LaserDileep GangwarNo ratings yet
- Spe 197382 MS PDFDocument12 pagesSpe 197382 MS PDFErick MorrisNo ratings yet
- Build Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DroneDocument21 pagesBuild Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DronewordfloNo ratings yet
- Laser-Based Inspection of Cutting Tools For Advanced Manufacturing SystemsDocument8 pagesLaser-Based Inspection of Cutting Tools For Advanced Manufacturing Systemslelag96085No ratings yet
- Hyatt Regency, Johorbahru, 30-31 October 1998Document6 pagesHyatt Regency, Johorbahru, 30-31 October 1998Ariq FauzanNo ratings yet
- Final Synopsys Stage OneDocument4 pagesFinal Synopsys Stage OnePushkraj GawaleNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- 1 s2.0 S0003682X18300951 MainDocument8 pages1 s2.0 S0003682X18300951 Mainlcs1307No ratings yet
- PC Based Spectrum Analuzer With MC1496Document7 pagesPC Based Spectrum Analuzer With MC1496SzyNo ratings yet
- Metrology-Integrated Industrial Robots - Calibration, Implementation and TestingDocument6 pagesMetrology-Integrated Industrial Robots - Calibration, Implementation and TestingBiris GabrielNo ratings yet
- Vibration Measuring InstrumentsDocument8 pagesVibration Measuring InstrumentsSardar Wasif Ashraf KhanNo ratings yet
- Voice Control of Dual-Drive Mobile Robots Survey of AlgorithmsDocument6 pagesVoice Control of Dual-Drive Mobile Robots Survey of AlgorithmspritiNo ratings yet
- Thesis Cmos Image SensorDocument8 pagesThesis Cmos Image Sensortamikabrownjackson100% (2)
- AR Image ENHANEMENTDocument10 pagesAR Image ENHANEMENTPanduranga VitalNo ratings yet
- Sensors 23 03405 v2Document21 pagesSensors 23 03405 v2Caio FlemingNo ratings yet
- High Dynamics RadiosDocument16 pagesHigh Dynamics RadiosDaniel LimaNo ratings yet
- From Solid To Plane Tessellations s00004-018-0389-5Document28 pagesFrom Solid To Plane Tessellations s00004-018-0389-5Hua Hidari YangNo ratings yet
- Toward Extenics-Based Innovation Model on IntelligDocument23 pagesToward Extenics-Based Innovation Model on IntelligHua Hidari YangNo ratings yet
- Mechanics of Engineering-A Treatise On Hydraulics and Pneumatics 1889Document333 pagesMechanics of Engineering-A Treatise On Hydraulics and Pneumatics 1889Hua Hidari YangNo ratings yet
- Adiabatic Behavior of The Vuilleumier Heat PumpDocument11 pagesAdiabatic Behavior of The Vuilleumier Heat PumpHua Hidari YangNo ratings yet
- Fenrg 09 834283 Optical NameplateDocument8 pagesFenrg 09 834283 Optical NameplateHua Hidari YangNo ratings yet
- Lockhart1997 Methodology For Evaluating Fuel Dispenser NozzleDocument11 pagesLockhart1997 Methodology For Evaluating Fuel Dispenser NozzleHua Hidari YangNo ratings yet
- Woods2014 Membrane Processes For Heating, Ventilation, and Air ConditioningDocument15 pagesWoods2014 Membrane Processes For Heating, Ventilation, and Air ConditioningHua Hidari YangNo ratings yet
- Jmse 08 00357 v3Document32 pagesJmse 08 00357 v3Hua Hidari YangNo ratings yet
- Hugo Gernsback's Unconventional Inventions - Lemelson Center For The Study of Invention and InnovationDocument3 pagesHugo Gernsback's Unconventional Inventions - Lemelson Center For The Study of Invention and InnovationHua Hidari YangNo ratings yet
- Aiaa 2009 4539Document16 pagesAiaa 2009 4539Hua Hidari YangNo ratings yet
- Orbital Atk Research SummaryDocument28 pagesOrbital Atk Research SummaryHua Hidari YangNo ratings yet
- JFM93 47-63 Maxworthy WeisfoghDocument24 pagesJFM93 47-63 Maxworthy WeisfoghHua Hidari YangNo ratings yet
- 212 220yousifDocument10 pages212 220yousifHua Hidari YangNo ratings yet
- Applsci-09-02278 Study On Low-Speed Stability of A Motorcycle 2019Document15 pagesApplsci-09-02278 Study On Low-Speed Stability of A Motorcycle 2019Hua Hidari YangNo ratings yet
- A027055 Vuilleumier Cycle CryogenicDocument66 pagesA027055 Vuilleumier Cycle CryogenicHua Hidari YangNo ratings yet
- Laboratory Modelling of The Dynamics of Coastal UpDocument124 pagesLaboratory Modelling of The Dynamics of Coastal UpHua Hidari YangNo ratings yet
- The Japanese Startup Ecosystem - Opportunities For Eu CollaborationDocument56 pagesThe Japanese Startup Ecosystem - Opportunities For Eu CollaborationHua Hidari YangNo ratings yet
- Kadis ACRA 2010 FinalDocument9 pagesKadis ACRA 2010 FinalHua Hidari YangNo ratings yet
- Determining Research and Development Expenditure TDocument10 pagesDetermining Research and Development Expenditure THua Hidari YangNo ratings yet
- ADA369158 Fish Rohr Dolphin 1999Document187 pagesADA369158 Fish Rohr Dolphin 1999Hua Hidari YangNo ratings yet
- Guillaume Durandau ThesisDocument152 pagesGuillaume Durandau ThesisHua Hidari YangNo ratings yet
- Acafraud 2020Document28 pagesAcafraud 2020Hua Hidari YangNo ratings yet
- Discrete Calculus As A Bridge Between Scales: February 2012Document10 pagesDiscrete Calculus As A Bridge Between Scales: February 2012Hua Hidari YangNo ratings yet
- A Historical Survey of Methods of Solving Cubic Equations U Richmond 1956Document93 pagesA Historical Survey of Methods of Solving Cubic Equations U Richmond 1956Hua Hidari YangNo ratings yet
- Final Version Manchester 2Document20 pagesFinal Version Manchester 2Hua Hidari YangNo ratings yet
- Origami Based Mechanical Metamat 2014Document6 pagesOrigami Based Mechanical Metamat 2014Hua Hidari YangNo ratings yet
- Rosid - 2018 - J. - Phys. - Conf. - Ser. - 1005 - 012015 Indon UavDocument8 pagesRosid - 2018 - J. - Phys. - Conf. - Ser. - 1005 - 012015 Indon UavHua Hidari YangNo ratings yet
- Installation Manual EM-303/EM-304/EM-305: I. Accessory Parts II. Installation ProceduresDocument3 pagesInstallation Manual EM-303/EM-304/EM-305: I. Accessory Parts II. Installation ProceduresHoussein KachmarNo ratings yet
- 2019 What Is Cost-Efficient PhenotypingDocument35 pages2019 What Is Cost-Efficient PhenotypingnobenprizeNo ratings yet
- Australian Banks IT Business Alignment Leads To New Product and System Development ProcessDocument7 pagesAustralian Banks IT Business Alignment Leads To New Product and System Development ProcessChandan ThakurNo ratings yet
- Kaizen For HRDocument2 pagesKaizen For HRsushumcastle6546100% (1)
- RBI Guidelines On Information SecurityDocument171 pagesRBI Guidelines On Information SecurityMubeen MirzaNo ratings yet
- MIB 303 - Automatic Separation System Module - Operating Instructions - 2007Document13 pagesMIB 303 - Automatic Separation System Module - Operating Instructions - 2007Centrifugal SeparatorNo ratings yet
- 380VY 50Hz 1.1kW 4P M3GP Motor Data Sheet (IE3 & IP56)Document3 pages380VY 50Hz 1.1kW 4P M3GP Motor Data Sheet (IE3 & IP56)chris110No ratings yet
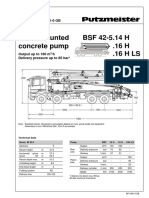
- Truck-Mounted BSF 42-5.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 4381-0 GBDocument2 pagesTruck-Mounted BSF 42-5.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 4381-0 GBSofNo ratings yet
- Azure Virtual Desktop - User Guide - v1.2Document61 pagesAzure Virtual Desktop - User Guide - v1.2Carlos CelisNo ratings yet
- AMT Pump Datasheet 2ES30C 3PDocument2 pagesAMT Pump Datasheet 2ES30C 3PsimbarasheNo ratings yet
- Back To Basics - Car Audio 101 - Battery and AltenatorDocument4 pagesBack To Basics - Car Audio 101 - Battery and AltenatorMax BeeksNo ratings yet
- As 022Document7 pagesAs 022gupta7272No ratings yet
- (A) Draw A MIB Subtree. (OID For Enterprise Node Is 1.3.6.1.4.1) (B) Draw The MIB Module (Mentioning SYNTAX, ACCESS, STATUS, DESCRIPTIONDocument2 pages(A) Draw A MIB Subtree. (OID For Enterprise Node Is 1.3.6.1.4.1) (B) Draw The MIB Module (Mentioning SYNTAX, ACCESS, STATUS, DESCRIPTIONsvs netflixNo ratings yet
- Total Quality Management Unit IvDocument6 pagesTotal Quality Management Unit IvYogita NarangNo ratings yet
- MCP2025 LIN Transceiver With Voltage RegulatorDocument36 pagesMCP2025 LIN Transceiver With Voltage RegulatorDeni SheNo ratings yet
- e-CODEX D5.3 Concept of Implementation v1 PDFDocument133 pagese-CODEX D5.3 Concept of Implementation v1 PDFlaloshNo ratings yet
- (C) En-Ppg-Pulsed-Power-Supplies-White-PaperDocument15 pages(C) En-Ppg-Pulsed-Power-Supplies-White-PaperPrashant SinghNo ratings yet
- Hikvision Ds-2cd63c2f - I (V) (S)Document5 pagesHikvision Ds-2cd63c2f - I (V) (S)Oscar HerreraNo ratings yet
- Caillau Visa ToolDocument14 pagesCaillau Visa ToolLady MenaNo ratings yet
- Edward Tam ResumeDocument1 pageEdward Tam Resumeedwardkt903No ratings yet
- GX Global Powers of Luxury Goods 2023Document78 pagesGX Global Powers of Luxury Goods 2023xen101No ratings yet
- Core Banking SolutionDocument61 pagesCore Banking SolutionJaved AhamedNo ratings yet
- Experiment No. 8: Aim: WAP To Interface The 4x4 Keypad With Microcontroller and Display The Respective Digit OnDocument9 pagesExperiment No. 8: Aim: WAP To Interface The 4x4 Keypad With Microcontroller and Display The Respective Digit OnSumeet SainiNo ratings yet
- The Increased Strength of The Gear in The Main Hydraulic Pump Improves DurabilityDocument6 pagesThe Increased Strength of The Gear in The Main Hydraulic Pump Improves DurabilityjfarcoNo ratings yet
- UV-J221 - Operating Manual - Jun18Document3 pagesUV-J221 - Operating Manual - Jun18Michael LloydNo ratings yet
- Engr. Romel N. Vingua Construction Equipments Operations and MaintenanceDocument1 pageEngr. Romel N. Vingua Construction Equipments Operations and MaintenanceQueenie PerezNo ratings yet