
Instructions For Creating A 3D Laser Scanner Based On A CNC Machine
Instructions For Creating A 3D Laser Scanner Based On A CNC Machine
You might also like
- Honeywell Pro-Watch API Service DocumentationDocument150 pagesHoneywell Pro-Watch API Service DocumentationMarcos LisboaNo ratings yet
- Lab Report EE222Document5 pagesLab Report EE222Adil ShahidNo ratings yet
- Users Guide ProH Rev5.0.2 101208 PDFDocument40 pagesUsers Guide ProH Rev5.0.2 101208 PDFHoracio BacasNo ratings yet
- ST Imu Lsm6ds3 DatasheetDocument102 pagesST Imu Lsm6ds3 DatasheetLaamim YoussefNo ratings yet
- Winmate Barcode Reader User Guide - V1.2Document26 pagesWinmate Barcode Reader User Guide - V1.2Dinesh GodhaniNo ratings yet
- BBC Micro:bit v2: Please See For Latest UpdatesDocument10 pagesBBC Micro:bit v2: Please See For Latest UpdatesscosminNo ratings yet
- Manual ProH 4.6 040206Document46 pagesManual ProH 4.6 040206maximeNo ratings yet
- MEMS Motion Sensor: Three-Axis Digital Output Gyroscope: ApplicationsDocument44 pagesMEMS Motion Sensor: Three-Axis Digital Output Gyroscope: ApplicationsMile MartinovNo ratings yet
- LSM6DS3 DatasheetDocument100 pagesLSM6DS3 DatasheetJoel CuevaNo ratings yet
- Nikon Metrology API v3.7 - Reference ManualDocument30 pagesNikon Metrology API v3.7 - Reference ManualQuangNguyenDuyNo ratings yet
- Radar Based Security System For Night Time Jewellery Shop and Bank Locker SecurityDocument53 pagesRadar Based Security System For Night Time Jewellery Shop and Bank Locker Securitynithyashanmugasundaram28No ratings yet
- As7341 DS000504 3-00Document68 pagesAs7341 DS000504 3-00mek itoNo ratings yet
- Final Project NewDocument38 pagesFinal Project NewTanveer Wani100% (1)
- Scanner Metrologic IS4125Document36 pagesScanner Metrologic IS4125davieletronicaNo ratings yet
- DocumentDocument107 pagesDocumentdileeppatraNo ratings yet
- CMV50000 Ams OSRAMDocument139 pagesCMV50000 Ams OSRAMSanjay SharmaNo ratings yet
- Getting Started With 1 Wire Bus Devices TR15-235Document34 pagesGetting Started With 1 Wire Bus Devices TR15-235BrianNo ratings yet
- Cat OptoNCDT enDocument36 pagesCat OptoNCDT enNikhil SharmaNo ratings yet
- Es Mini Project PDFDocument6 pagesEs Mini Project PDFVandana SudhakarNo ratings yet
- Banner Q3X Laser Contrast SensorDocument33 pagesBanner Q3X Laser Contrast SensorMark R.No ratings yet
- Lsm6Dsl: iNEMO Inertial Module: Always-On 3D Accelerometer and 3D GyroscopeDocument113 pagesLsm6Dsl: iNEMO Inertial Module: Always-On 3D Accelerometer and 3D GyroscopeDija AgusNo ratings yet
- 7.an Embedded System BasedDocument2 pages7.an Embedded System BasedPooja BanNo ratings yet
- Metrologic Instruments, Inc.: MH941 Hand-Held Laser ScannerDocument33 pagesMetrologic Instruments, Inc.: MH941 Hand-Held Laser ScannerEduardo Ceroni NavarroNo ratings yet
- Your Paragraph TextDocument20 pagesYour Paragraph Text1025Anusri KambhampatiNo ratings yet
- Course Code Microcontroller Computer Peripherals and Interfacing LabDocument17 pagesCourse Code Microcontroller Computer Peripherals and Interfacing LabAll OneNo ratings yet
- Project Eye...Document40 pagesProject Eye...Vijayudu MahezaNo ratings yet
- Ijsred V2i2p79Document6 pagesIjsred V2i2p79Klan ZangoNo ratings yet
- Project Report: Bidirectional Visitor Counter Group#3 Submitted byDocument8 pagesProject Report: Bidirectional Visitor Counter Group#3 Submitted byMarwa QasimNo ratings yet
- AR3645 LD2420 Sensor de Presencia Humana DatasheetDocument16 pagesAR3645 LD2420 Sensor de Presencia Humana DatasheetKévin Kouakou kouadioNo ratings yet
- Assignment: Course Code Microcontroller Computer Peripherals and Interfacing LabDocument17 pagesAssignment: Course Code Microcontroller Computer Peripherals and Interfacing LabAll OneNo ratings yet
- VL53L0X Distance Sensor User Manual enDocument12 pagesVL53L0X Distance Sensor User Manual enMarcelo D.No ratings yet
- Wireless Multi Axis ROBOT For Multi-Purpose OperationsDocument5 pagesWireless Multi Axis ROBOT For Multi-Purpose OperationsseventhsensegroupNo ratings yet
- Laser Sensor User Manual: 1. FeaturesDocument3 pagesLaser Sensor User Manual: 1. FeaturesbejanNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- Digitalized Voice-Command-Based Social Distancing RobotDocument8 pagesDigitalized Voice-Command-Based Social Distancing RobotIJRASETPublicationsNo ratings yet
- Finger Print Based System For Driving Licensing VerificationDocument4 pagesFinger Print Based System For Driving Licensing VerificationLyn ZubietoNo ratings yet
- NEW-PBL KIT Manual PDFDocument44 pagesNEW-PBL KIT Manual PDFpawan khalse100% (1)
- LDS-50C-C30Eenglish ManualDocument20 pagesLDS-50C-C30Eenglish ManualNitin ChavanNo ratings yet
- ةزظDocument101 pagesةزظAbu Bakr M. SaeedNo ratings yet
- User's Manual.: Laser Diffraction SensorDocument50 pagesUser's Manual.: Laser Diffraction SensorDimNo ratings yet
- Literature ReviewDocument9 pagesLiterature ReviewStephanie May DancesNo ratings yet
- Snoaa 76Document13 pagesSnoaa 76Sagar ChaulagaiNo ratings yet
- LSM6DS33 STMicroelectronicsDocument78 pagesLSM6DS33 STMicroelectronicsOscar Caetano FontNo ratings yet
- Iot Based War Field Spying RobotDocument6 pagesIot Based War Field Spying RobotaryanNo ratings yet
- MS700i Series Laser Bar Code Projection Scanner: Installation and User's GuideDocument57 pagesMS700i Series Laser Bar Code Projection Scanner: Installation and User's GuidecopisoufNo ratings yet
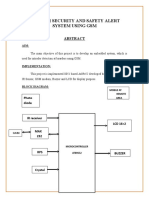
- Boarder Security and Safety Alert System Using GSM: Photo DiodeDocument3 pagesBoarder Security and Safety Alert System Using GSM: Photo DiodenkpatilNo ratings yet
- VL 53 L 0 XDocument40 pagesVL 53 L 0 XFortino JarmNo ratings yet
- Chapter 01Document17 pagesChapter 01NIKHIL PUJARINo ratings yet
- Report For Industrial Monitoring-1Document73 pagesReport For Industrial Monitoring-1Abin K MathewNo ratings yet
- Miniproject Report Group 2 (Updated)Document37 pagesMiniproject Report Group 2 (Updated)Amar MursyidNo ratings yet
- Project Phase1 ECDocument16 pagesProject Phase1 ECBasavaraj MNo ratings yet
- LT3330078 Serial ProtocolDocument37 pagesLT3330078 Serial ProtocolSergio MuriloNo ratings yet
- CCD TheoryDocument31 pagesCCD TheoryJoel Gonçalves da SilvaNo ratings yet
- Barcode Scanner Seminar ReportDocument6 pagesBarcode Scanner Seminar ReportSindhu BijjalNo ratings yet
- Department of Technical EducationDocument12 pagesDepartment of Technical EducationDinesh NNo ratings yet
- User's Manual - Compact Omnidirectional Laser ScannerDocument20 pagesUser's Manual - Compact Omnidirectional Laser ScannerKia GalatiNo ratings yet
- Department of Electronic Engineering: "Design of An Arduino Based Radar System"Document8 pagesDepartment of Electronic Engineering: "Design of An Arduino Based Radar System"Meer Zafarullah Noohani0% (1)
- Security System For IndustriesDocument26 pagesSecurity System For IndustriesBhavana ShindeNo ratings yet
- Software Defined Radio: Enabling TechnologiesFrom EverandSoftware Defined Radio: Enabling TechnologiesWalter H.W. TuttlebeeNo ratings yet
- UserManual LCCAST600 en v5Document17 pagesUserManual LCCAST600 en v5Kamran ManafzadeNo ratings yet
- Siemens Sonoline Prima Ultrasound - User ManualDocument734 pagesSiemens Sonoline Prima Ultrasound - User ManualKamran Manafzade100% (1)
- Model No.: R150Xje Suffix: L01: Product SpecificationDocument29 pagesModel No.: R150Xje Suffix: L01: Product SpecificationKamran ManafzadeNo ratings yet
- UserManual LCCAST600T en v2Document13 pagesUserManual LCCAST600T en v2Kamran ManafzadeNo ratings yet
- Vaisala Iso45001 Certificate Eng 2020Document2 pagesVaisala Iso45001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- Vaisala Iso9001 Certificate Eng 2020Document2 pagesVaisala Iso9001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- Scheda Tecnica Selezionatrice Ponderale HC MDocument6 pagesScheda Tecnica Selezionatrice Ponderale HC MKamran ManafzadeNo ratings yet
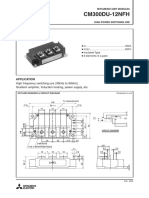
- Cm300du 12nfh eDocument6 pagesCm300du 12nfh eKamran ManafzadeNo ratings yet
- Full Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCDocument254 pagesFull Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCKamran ManafzadeNo ratings yet
- General Description Features: High-Current Low-Dropout RegulatorsDocument23 pagesGeneral Description Features: High-Current Low-Dropout RegulatorsKamran ManafzadeNo ratings yet
- Xilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICDocument20 pagesXilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICKamran ManafzadeNo ratings yet
- Erm2002-1 Series: EastrisingDocument20 pagesErm2002-1 Series: EastrisingKamran ManafzadeNo ratings yet
- Infineon BCV29 BCV49 DS v01 01 enDocument7 pagesInfineon BCV29 BCV49 DS v01 01 enKamran ManafzadeNo ratings yet
- KL3061 - Bus Terminal, 1-Channel Analog Input, Voltage, 0 10 V, 12 Bit, Single-EndedDocument3 pagesKL3061 - Bus Terminal, 1-Channel Analog Input, Voltage, 0 10 V, 12 Bit, Single-EndedKamran ManafzadeNo ratings yet
- Inchange Semiconductor BTA26 600B DatasheetDocument1 pageInchange Semiconductor BTA26 600B DatasheetKamran ManafzadeNo ratings yet
- SG-As Servo Driver User ManualDocument84 pagesSG-As Servo Driver User ManualKamran ManafzadeNo ratings yet
- DS1624 Digital Thermometer and Memory: General Description Benefits and FeaturesDocument14 pagesDS1624 Digital Thermometer and Memory: General Description Benefits and FeaturesKamran ManafzadeNo ratings yet
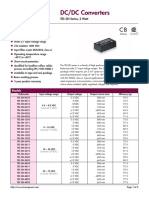
- DC/DC Converters: FeaturesDocument3 pagesDC/DC Converters: FeaturesKamran ManafzadeNo ratings yet
- Description:: Data SheetDocument2 pagesDescription:: Data SheetKamran ManafzadeNo ratings yet
- IMImobile PLC Annual Report 31st March 2017Document89 pagesIMImobile PLC Annual Report 31st March 2017Sridhar HaritasaNo ratings yet
- Martian V.F.W. by Vandenburg, G.L.Document13 pagesMartian V.F.W. by Vandenburg, G.L.Gutenberg.orgNo ratings yet
- SERV1 01e SystemFamilyDocument19 pagesSERV1 01e SystemFamilyNeagoe CristianNo ratings yet
- Red Hat Open Approach Vulnerability Management 1 - 2Document23 pagesRed Hat Open Approach Vulnerability Management 1 - 2JFLNo ratings yet
- SoftwareDocument2 pagesSoftwaregeethakaniNo ratings yet
- Connect Direct For Microsoft Windows 4.7 DocumentationDocument324 pagesConnect Direct For Microsoft Windows 4.7 DocumentationJose Ricardo Andrade CortesNo ratings yet
- The GPS Toolkit - Open Source GPS SoftwareDocument9 pagesThe GPS Toolkit - Open Source GPS SoftwarealextronNo ratings yet
- Polaris Dp-20 Web Guide Controller: User ManualDocument66 pagesPolaris Dp-20 Web Guide Controller: User ManualZosimo Palomino HuaccamaytaNo ratings yet
- En-JAY Electronique-Repair Data Package UD Series-V3Document83 pagesEn-JAY Electronique-Repair Data Package UD Series-V3tsdcnNo ratings yet
- Case Study 1 in HciDocument2 pagesCase Study 1 in HciClariza PascualNo ratings yet
- Design Guide: VLT Micro Drive FC 51Document99 pagesDesign Guide: VLT Micro Drive FC 51Giang BùiNo ratings yet
- Wood Express ManualDocument36 pagesWood Express ManualgertjaniNo ratings yet
- BAJA - 2021 - Registration GuidelinesDocument11 pagesBAJA - 2021 - Registration Guidelinesabhist singhNo ratings yet
- Business Analytics Certification Program LearnbayDocument30 pagesBusiness Analytics Certification Program Learnbaymanit singhNo ratings yet
- ZXCTN 9000 MML Configuration Guide (Raliability) V2.08.32 enDocument194 pagesZXCTN 9000 MML Configuration Guide (Raliability) V2.08.32 entaipm100% (1)
- Internet 2 BasicDocument20 pagesInternet 2 BasicKarthikeyan RamajayamNo ratings yet
- Reliability Ab PDFDocument4 pagesReliability Ab PDFLuis Alberto SanchezNo ratings yet
- Software Engineering Final PaperDocument3 pagesSoftware Engineering Final PaperSyed SaimNo ratings yet
- Siemens PCS7 Training ManualsDocument46 pagesSiemens PCS7 Training Manualsabdulahadkhan165No ratings yet
- Comp Fundamentals and Programming - SyllabusDocument4 pagesComp Fundamentals and Programming - SyllabusDiether LindeNo ratings yet
- PPS Unit-4 NotesDocument94 pagesPPS Unit-4 NotesruchiNo ratings yet
- STM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Document60 pagesSTM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Anil SuhaNo ratings yet
- AWS Basic Interview QuestionsDocument10 pagesAWS Basic Interview QuestionsVasundhara INo ratings yet
- Idir Mellal University of TorontoDocument25 pagesIdir Mellal University of TorontoMayuri AnandikarNo ratings yet
- Vertek Geotechnical and Environmental CatalogDocument48 pagesVertek Geotechnical and Environmental CatalogAlain TERRAZZONI100% (1)
- Chapter 1 OOPSDocument11 pagesChapter 1 OOPSPriyanka ShettyNo ratings yet
- Legal - Apple Music & Privacy - AppleDocument6 pagesLegal - Apple Music & Privacy - Apple32ujeik0No ratings yet
- Department of Computer Science: Introduction To Computer ApplicationDocument23 pagesDepartment of Computer Science: Introduction To Computer ApplicationshimelisNo ratings yet
- IIPGCMS - HomeDocument1 pageIIPGCMS - Homesathisha123No ratings yet









































































































Download as pdf or txt
You might also like
- Honeywell Pro-Watch API Service DocumentationDocument150 pagesHoneywell Pro-Watch API Service DocumentationMarcos LisboaNo ratings yet
- Lab Report EE222Document5 pagesLab Report EE222Adil ShahidNo ratings yet
- Users Guide ProH Rev5.0.2 101208 PDFDocument40 pagesUsers Guide ProH Rev5.0.2 101208 PDFHoracio BacasNo ratings yet
- ST Imu Lsm6ds3 DatasheetDocument102 pagesST Imu Lsm6ds3 DatasheetLaamim YoussefNo ratings yet
- Winmate Barcode Reader User Guide - V1.2Document26 pagesWinmate Barcode Reader User Guide - V1.2Dinesh GodhaniNo ratings yet
- BBC Micro:bit v2: Please See For Latest UpdatesDocument10 pagesBBC Micro:bit v2: Please See For Latest UpdatesscosminNo ratings yet
- Manual ProH 4.6 040206Document46 pagesManual ProH 4.6 040206maximeNo ratings yet
- MEMS Motion Sensor: Three-Axis Digital Output Gyroscope: ApplicationsDocument44 pagesMEMS Motion Sensor: Three-Axis Digital Output Gyroscope: ApplicationsMile MartinovNo ratings yet
- LSM6DS3 DatasheetDocument100 pagesLSM6DS3 DatasheetJoel CuevaNo ratings yet
- Nikon Metrology API v3.7 - Reference ManualDocument30 pagesNikon Metrology API v3.7 - Reference ManualQuangNguyenDuyNo ratings yet
- Radar Based Security System For Night Time Jewellery Shop and Bank Locker SecurityDocument53 pagesRadar Based Security System For Night Time Jewellery Shop and Bank Locker Securitynithyashanmugasundaram28No ratings yet
- As7341 DS000504 3-00Document68 pagesAs7341 DS000504 3-00mek itoNo ratings yet
- Final Project NewDocument38 pagesFinal Project NewTanveer Wani100% (1)
- Scanner Metrologic IS4125Document36 pagesScanner Metrologic IS4125davieletronicaNo ratings yet
- DocumentDocument107 pagesDocumentdileeppatraNo ratings yet
- CMV50000 Ams OSRAMDocument139 pagesCMV50000 Ams OSRAMSanjay SharmaNo ratings yet
- Getting Started With 1 Wire Bus Devices TR15-235Document34 pagesGetting Started With 1 Wire Bus Devices TR15-235BrianNo ratings yet
- Cat OptoNCDT enDocument36 pagesCat OptoNCDT enNikhil SharmaNo ratings yet
- Es Mini Project PDFDocument6 pagesEs Mini Project PDFVandana SudhakarNo ratings yet
- Banner Q3X Laser Contrast SensorDocument33 pagesBanner Q3X Laser Contrast SensorMark R.No ratings yet
- Lsm6Dsl: iNEMO Inertial Module: Always-On 3D Accelerometer and 3D GyroscopeDocument113 pagesLsm6Dsl: iNEMO Inertial Module: Always-On 3D Accelerometer and 3D GyroscopeDija AgusNo ratings yet
- 7.an Embedded System BasedDocument2 pages7.an Embedded System BasedPooja BanNo ratings yet
- Metrologic Instruments, Inc.: MH941 Hand-Held Laser ScannerDocument33 pagesMetrologic Instruments, Inc.: MH941 Hand-Held Laser ScannerEduardo Ceroni NavarroNo ratings yet
- Your Paragraph TextDocument20 pagesYour Paragraph Text1025Anusri KambhampatiNo ratings yet
- Course Code Microcontroller Computer Peripherals and Interfacing LabDocument17 pagesCourse Code Microcontroller Computer Peripherals and Interfacing LabAll OneNo ratings yet
- Project Eye...Document40 pagesProject Eye...Vijayudu MahezaNo ratings yet
- Ijsred V2i2p79Document6 pagesIjsred V2i2p79Klan ZangoNo ratings yet
- Project Report: Bidirectional Visitor Counter Group#3 Submitted byDocument8 pagesProject Report: Bidirectional Visitor Counter Group#3 Submitted byMarwa QasimNo ratings yet
- AR3645 LD2420 Sensor de Presencia Humana DatasheetDocument16 pagesAR3645 LD2420 Sensor de Presencia Humana DatasheetKévin Kouakou kouadioNo ratings yet
- Assignment: Course Code Microcontroller Computer Peripherals and Interfacing LabDocument17 pagesAssignment: Course Code Microcontroller Computer Peripherals and Interfacing LabAll OneNo ratings yet
- VL53L0X Distance Sensor User Manual enDocument12 pagesVL53L0X Distance Sensor User Manual enMarcelo D.No ratings yet
- Wireless Multi Axis ROBOT For Multi-Purpose OperationsDocument5 pagesWireless Multi Axis ROBOT For Multi-Purpose OperationsseventhsensegroupNo ratings yet
- Laser Sensor User Manual: 1. FeaturesDocument3 pagesLaser Sensor User Manual: 1. FeaturesbejanNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- Digitalized Voice-Command-Based Social Distancing RobotDocument8 pagesDigitalized Voice-Command-Based Social Distancing RobotIJRASETPublicationsNo ratings yet
- Finger Print Based System For Driving Licensing VerificationDocument4 pagesFinger Print Based System For Driving Licensing VerificationLyn ZubietoNo ratings yet
- NEW-PBL KIT Manual PDFDocument44 pagesNEW-PBL KIT Manual PDFpawan khalse100% (1)
- LDS-50C-C30Eenglish ManualDocument20 pagesLDS-50C-C30Eenglish ManualNitin ChavanNo ratings yet
- ةزظDocument101 pagesةزظAbu Bakr M. SaeedNo ratings yet
- User's Manual.: Laser Diffraction SensorDocument50 pagesUser's Manual.: Laser Diffraction SensorDimNo ratings yet
- Literature ReviewDocument9 pagesLiterature ReviewStephanie May DancesNo ratings yet
- Snoaa 76Document13 pagesSnoaa 76Sagar ChaulagaiNo ratings yet
- LSM6DS33 STMicroelectronicsDocument78 pagesLSM6DS33 STMicroelectronicsOscar Caetano FontNo ratings yet
- Iot Based War Field Spying RobotDocument6 pagesIot Based War Field Spying RobotaryanNo ratings yet
- MS700i Series Laser Bar Code Projection Scanner: Installation and User's GuideDocument57 pagesMS700i Series Laser Bar Code Projection Scanner: Installation and User's GuidecopisoufNo ratings yet
- Boarder Security and Safety Alert System Using GSM: Photo DiodeDocument3 pagesBoarder Security and Safety Alert System Using GSM: Photo DiodenkpatilNo ratings yet
- VL 53 L 0 XDocument40 pagesVL 53 L 0 XFortino JarmNo ratings yet
- Chapter 01Document17 pagesChapter 01NIKHIL PUJARINo ratings yet
- Report For Industrial Monitoring-1Document73 pagesReport For Industrial Monitoring-1Abin K MathewNo ratings yet
- Miniproject Report Group 2 (Updated)Document37 pagesMiniproject Report Group 2 (Updated)Amar MursyidNo ratings yet
- Project Phase1 ECDocument16 pagesProject Phase1 ECBasavaraj MNo ratings yet
- LT3330078 Serial ProtocolDocument37 pagesLT3330078 Serial ProtocolSergio MuriloNo ratings yet
- CCD TheoryDocument31 pagesCCD TheoryJoel Gonçalves da SilvaNo ratings yet
- Barcode Scanner Seminar ReportDocument6 pagesBarcode Scanner Seminar ReportSindhu BijjalNo ratings yet
- Department of Technical EducationDocument12 pagesDepartment of Technical EducationDinesh NNo ratings yet
- User's Manual - Compact Omnidirectional Laser ScannerDocument20 pagesUser's Manual - Compact Omnidirectional Laser ScannerKia GalatiNo ratings yet
- Department of Electronic Engineering: "Design of An Arduino Based Radar System"Document8 pagesDepartment of Electronic Engineering: "Design of An Arduino Based Radar System"Meer Zafarullah Noohani0% (1)
- Security System For IndustriesDocument26 pagesSecurity System For IndustriesBhavana ShindeNo ratings yet
- Software Defined Radio: Enabling TechnologiesFrom EverandSoftware Defined Radio: Enabling TechnologiesWalter H.W. TuttlebeeNo ratings yet
- UserManual LCCAST600 en v5Document17 pagesUserManual LCCAST600 en v5Kamran ManafzadeNo ratings yet
- Siemens Sonoline Prima Ultrasound - User ManualDocument734 pagesSiemens Sonoline Prima Ultrasound - User ManualKamran Manafzade100% (1)
- Model No.: R150Xje Suffix: L01: Product SpecificationDocument29 pagesModel No.: R150Xje Suffix: L01: Product SpecificationKamran ManafzadeNo ratings yet
- UserManual LCCAST600T en v2Document13 pagesUserManual LCCAST600T en v2Kamran ManafzadeNo ratings yet
- Vaisala Iso45001 Certificate Eng 2020Document2 pagesVaisala Iso45001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- Vaisala Iso9001 Certificate Eng 2020Document2 pagesVaisala Iso9001 Certificate Eng 2020Kamran ManafzadeNo ratings yet
- Scheda Tecnica Selezionatrice Ponderale HC MDocument6 pagesScheda Tecnica Selezionatrice Ponderale HC MKamran ManafzadeNo ratings yet
- Cm300du 12nfh eDocument6 pagesCm300du 12nfh eKamran ManafzadeNo ratings yet
- Full Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCDocument254 pagesFull Speed USB, 16 K ISP FLASH MCU Family: 10-Bit ADCKamran ManafzadeNo ratings yet
- General Description Features: High-Current Low-Dropout RegulatorsDocument23 pagesGeneral Description Features: High-Current Low-Dropout RegulatorsKamran ManafzadeNo ratings yet
- Xilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICDocument20 pagesXilinx® Spartan® 6 Power Reference Design With TPS650250 Power Management ICKamran ManafzadeNo ratings yet
- Erm2002-1 Series: EastrisingDocument20 pagesErm2002-1 Series: EastrisingKamran ManafzadeNo ratings yet
- Infineon BCV29 BCV49 DS v01 01 enDocument7 pagesInfineon BCV29 BCV49 DS v01 01 enKamran ManafzadeNo ratings yet
- KL3061 - Bus Terminal, 1-Channel Analog Input, Voltage, 0 10 V, 12 Bit, Single-EndedDocument3 pagesKL3061 - Bus Terminal, 1-Channel Analog Input, Voltage, 0 10 V, 12 Bit, Single-EndedKamran ManafzadeNo ratings yet
- Inchange Semiconductor BTA26 600B DatasheetDocument1 pageInchange Semiconductor BTA26 600B DatasheetKamran ManafzadeNo ratings yet
- SG-As Servo Driver User ManualDocument84 pagesSG-As Servo Driver User ManualKamran ManafzadeNo ratings yet
- DS1624 Digital Thermometer and Memory: General Description Benefits and FeaturesDocument14 pagesDS1624 Digital Thermometer and Memory: General Description Benefits and FeaturesKamran ManafzadeNo ratings yet
- DC/DC Converters: FeaturesDocument3 pagesDC/DC Converters: FeaturesKamran ManafzadeNo ratings yet
- Description:: Data SheetDocument2 pagesDescription:: Data SheetKamran ManafzadeNo ratings yet
- IMImobile PLC Annual Report 31st March 2017Document89 pagesIMImobile PLC Annual Report 31st March 2017Sridhar HaritasaNo ratings yet
- Martian V.F.W. by Vandenburg, G.L.Document13 pagesMartian V.F.W. by Vandenburg, G.L.Gutenberg.orgNo ratings yet
- SERV1 01e SystemFamilyDocument19 pagesSERV1 01e SystemFamilyNeagoe CristianNo ratings yet
- Red Hat Open Approach Vulnerability Management 1 - 2Document23 pagesRed Hat Open Approach Vulnerability Management 1 - 2JFLNo ratings yet
- SoftwareDocument2 pagesSoftwaregeethakaniNo ratings yet
- Connect Direct For Microsoft Windows 4.7 DocumentationDocument324 pagesConnect Direct For Microsoft Windows 4.7 DocumentationJose Ricardo Andrade CortesNo ratings yet
- The GPS Toolkit - Open Source GPS SoftwareDocument9 pagesThe GPS Toolkit - Open Source GPS SoftwarealextronNo ratings yet
- Polaris Dp-20 Web Guide Controller: User ManualDocument66 pagesPolaris Dp-20 Web Guide Controller: User ManualZosimo Palomino HuaccamaytaNo ratings yet
- En-JAY Electronique-Repair Data Package UD Series-V3Document83 pagesEn-JAY Electronique-Repair Data Package UD Series-V3tsdcnNo ratings yet
- Case Study 1 in HciDocument2 pagesCase Study 1 in HciClariza PascualNo ratings yet
- Design Guide: VLT Micro Drive FC 51Document99 pagesDesign Guide: VLT Micro Drive FC 51Giang BùiNo ratings yet
- Wood Express ManualDocument36 pagesWood Express ManualgertjaniNo ratings yet
- BAJA - 2021 - Registration GuidelinesDocument11 pagesBAJA - 2021 - Registration Guidelinesabhist singhNo ratings yet
- Business Analytics Certification Program LearnbayDocument30 pagesBusiness Analytics Certification Program Learnbaymanit singhNo ratings yet
- ZXCTN 9000 MML Configuration Guide (Raliability) V2.08.32 enDocument194 pagesZXCTN 9000 MML Configuration Guide (Raliability) V2.08.32 entaipm100% (1)
- Internet 2 BasicDocument20 pagesInternet 2 BasicKarthikeyan RamajayamNo ratings yet
- Reliability Ab PDFDocument4 pagesReliability Ab PDFLuis Alberto SanchezNo ratings yet
- Software Engineering Final PaperDocument3 pagesSoftware Engineering Final PaperSyed SaimNo ratings yet
- Siemens PCS7 Training ManualsDocument46 pagesSiemens PCS7 Training Manualsabdulahadkhan165No ratings yet
- Comp Fundamentals and Programming - SyllabusDocument4 pagesComp Fundamentals and Programming - SyllabusDiether LindeNo ratings yet
- PPS Unit-4 NotesDocument94 pagesPPS Unit-4 NotesruchiNo ratings yet
- STM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Document60 pagesSTM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Anil SuhaNo ratings yet
- AWS Basic Interview QuestionsDocument10 pagesAWS Basic Interview QuestionsVasundhara INo ratings yet
- Idir Mellal University of TorontoDocument25 pagesIdir Mellal University of TorontoMayuri AnandikarNo ratings yet
- Vertek Geotechnical and Environmental CatalogDocument48 pagesVertek Geotechnical and Environmental CatalogAlain TERRAZZONI100% (1)
- Chapter 1 OOPSDocument11 pagesChapter 1 OOPSPriyanka ShettyNo ratings yet
- Legal - Apple Music & Privacy - AppleDocument6 pagesLegal - Apple Music & Privacy - Apple32ujeik0No ratings yet
- Department of Computer Science: Introduction To Computer ApplicationDocument23 pagesDepartment of Computer Science: Introduction To Computer ApplicationshimelisNo ratings yet
- IIPGCMS - HomeDocument1 pageIIPGCMS - Homesathisha123No ratings yet