Download as docx, pdf, or txt
You might also like
- Cti en PDFDocument44 pagesCti en PDFbatbayarNo ratings yet
- Servo MoDocument10 pagesServo MonatiNo ratings yet
- Servo MotorDocument11 pagesServo MotorBotlhe SomolekaeNo ratings yet
- Ac-Dc-Servomotor-Net NotesDocument9 pagesAc-Dc-Servomotor-Net NotesDINESHKUMAR SNo ratings yet
- Theory DC ServoMDocument3 pagesTheory DC ServoMKaustubh DesaiNo ratings yet
- DC ServomotorDocument16 pagesDC ServomotorNSS18EE048 BILINE KCNo ratings yet
- Servo Motors Types and ApplicationsDocument22 pagesServo Motors Types and ApplicationsJavierNo ratings yet
- Steeper and Servo MotorsDocument3 pagesSteeper and Servo MotorsIan Justine JornalesNo ratings yet
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- DC and AC Motor ControlDocument6 pagesDC and AC Motor Controldes tosNo ratings yet
- ArunDocument11 pagesArunArun ANo ratings yet
- DC Servomotors Assignment 02Document5 pagesDC Servomotors Assignment 02Saad BhattiNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Unit-II Drive SystemDocument84 pagesUnit-II Drive SystemSatheesh KumarNo ratings yet
- G 07 NewDocument15 pagesG 07 NewZacknaick 001No ratings yet
- Objective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)Document3 pagesObjective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)Ansh NarulaNo ratings yet
- DC Serv O-Mo TOR: Engr. M.BILALDocument28 pagesDC Serv O-Mo TOR: Engr. M.BILALBilalNo ratings yet
- Automation System Design - 2 - 1709737440783Document37 pagesAutomation System Design - 2 - 1709737440783Vaishnavi CharyaNo ratings yet
- Computer Numeric Control: Prof. J. Ramkumar Department of Mechanical Engineering IIT KanpurDocument48 pagesComputer Numeric Control: Prof. J. Ramkumar Department of Mechanical Engineering IIT KanpurHassnain MohdNo ratings yet
- CNC MachinesDocument52 pagesCNC Machinespranav sharmaNo ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Mechatronics Lab Assignment: Servo MotorsDocument3 pagesMechatronics Lab Assignment: Servo MotorsNavendu GuptaNo ratings yet
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- Servo MotorDocument9 pagesServo Motoramanda christineNo ratings yet
- Computer Numeric ControlDocument48 pagesComputer Numeric Controlabdifatah.nadir.snu.eduNo ratings yet
- DC Drives - ConstructionDocument10 pagesDC Drives - ConstructionSuyog ShingareNo ratings yet
- Computer Numeric Control: Prof. J. Ramkumar Department of Mechanical Engineering IIT KanpurDocument48 pagesComputer Numeric Control: Prof. J. Ramkumar Department of Mechanical Engineering IIT KanpurAjay VermaNo ratings yet
- Servo Motor - Diagram, Definition, Types, Working & ApplicationsDocument31 pagesServo Motor - Diagram, Definition, Types, Working & ApplicationsTanmay MalhotraNo ratings yet
- Servo Motor - Types, Construction, Working, Controlling & ApplicationsDocument7 pagesServo Motor - Types, Construction, Working, Controlling & ApplicationsAHMED YOUSEFNo ratings yet
- DC Drive ExplainationDocument17 pagesDC Drive ExplainationTabassum BanoNo ratings yet
- Control System - by Rakesh KumarDocument6 pagesControl System - by Rakesh KumarRakesh KumarNo ratings yet
- Servomotor: Types of Motor Used in ServomotorDocument4 pagesServomotor: Types of Motor Used in ServomotorJawad SandhuNo ratings yet
- Machines AssignmentDocument7 pagesMachines AssignmentCharles MuneneNo ratings yet
- Servo MotorDocument31 pagesServo Motoradiamiru25% (4)
- Brushless Servomotor: Presented byDocument16 pagesBrushless Servomotor: Presented byDev KumarNo ratings yet
- Industrial Drive Unit 1Document24 pagesIndustrial Drive Unit 1Nilanjan PodderNo ratings yet
- Servo Motor - Servo Mechanism - Theory and Working PrincipleDocument6 pagesServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghNo ratings yet
- 11 Additional Reading - CNCDocument49 pages11 Additional Reading - CNCAnoop kumar YadavNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Servo MotorDocument3 pagesServo Motormuneeb saeedNo ratings yet
- Servo Drive: FunctionDocument2 pagesServo Drive: FunctionBrahmanand SinghNo ratings yet
- DriveDocument7 pagesDrivenaveen jainNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Topic 6 and 7 - DC and AC DrivesDocument26 pagesTopic 6 and 7 - DC and AC DrivesAvinesh ChandNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- Eceg-5401 2Document37 pagesEceg-5401 2Kide Bay0% (1)
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- ServomechanismDocument4 pagesServomechanismamuthaneceNo ratings yet
- DC MotorsDocument12 pagesDC Motorsmuletola7No ratings yet
- Final PresentationDocument103 pagesFinal PresentationQasir NawazNo ratings yet
- DC ServomotorDocument3 pagesDC ServomotorAshutosh Prakash MishraNo ratings yet
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDocument22 pagesUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNo ratings yet
- Servo Motor Selection For UAVDocument9 pagesServo Motor Selection For UAVUAV Society100% (1)
- Servo Motors Types and ApplicationsDocument22 pagesServo Motors Types and ApplicationsLakshman ReddyNo ratings yet
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- Servo MotorDocument41 pagesServo MotorVaibhav Patil100% (1)
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- VVVF Drive PresentationDocument19 pagesVVVF Drive PresentationKirti BedpuriyaNo ratings yet
- DC MotorsDocument12 pagesDC MotorsJamie Ray DalisayNo ratings yet
- VFDDocument20 pagesVFDHarsh Tiwari100% (1)
- Generator Excitation SystemDocument34 pagesGenerator Excitation Systemwas00266100% (2)
- Micom ManualDocument16 pagesMicom ManualanilNo ratings yet
- Fuji Inverter Fvr-E7s-Ex - Manual - English PDFDocument59 pagesFuji Inverter Fvr-E7s-Ex - Manual - English PDFAntonio DiazNo ratings yet
- A02-0163 Isovaara LRDocument2 pagesA02-0163 Isovaara LRMarcos Silva MonteloNo ratings yet
- SocotraDocument5 pagesSocotram_mukbel8752No ratings yet
- CMP 200 Service and Installation Manual: CPI Canada IncDocument197 pagesCMP 200 Service and Installation Manual: CPI Canada IncBartosz Ogibowski100% (2)
- Azhar 2020Document6 pagesAzhar 2020PRi TOmNo ratings yet
- LineDocument63 pagesLinesvanand880% (1)
- Transducers Catalogue A0140e-9 Low5 PDFDocument56 pagesTransducers Catalogue A0140e-9 Low5 PDFMOHAMMAEDNo ratings yet
- GE FEL EW AYG Modules 1 2Document61 pagesGE FEL EW AYG Modules 1 2The UnknownNo ratings yet
- I113e Mx2-Series Variable Frequency Drives Datasheet enDocument18 pagesI113e Mx2-Series Variable Frequency Drives Datasheet enDuy Phạm VănNo ratings yet
- Design of Small Scale Solar Powered HouseDocument6 pagesDesign of Small Scale Solar Powered Houseأيمن الكزةNo ratings yet
- CB-100UserGuide Capacitance and Dissipation Factor BridgeDocument92 pagesCB-100UserGuide Capacitance and Dissipation Factor BridgeHoang Thanh VanNo ratings yet
- Unit-2 Part ADocument16 pagesUnit-2 Part AMr. R. Jagan EEENo ratings yet
- Can We Operate A 60Hz Transformer On 50Hz Supply Source and Vice VersaDocument4 pagesCan We Operate A 60Hz Transformer On 50Hz Supply Source and Vice VersakuwabbNo ratings yet
- Preventive Maintenance of Transformer KiosksDocument1 pagePreventive Maintenance of Transformer Kiosksahmed tariqNo ratings yet
- Variable Frequency DriveDocument2 pagesVariable Frequency Driveloreen regtanNo ratings yet
- Power Tracker enDocument1 pagePower Tracker enjavier_chapuzasNo ratings yet
- 1266 41Document171 pages1266 41malathi SNo ratings yet
- Aegps Protect Rcs enDocument8 pagesAegps Protect Rcs enT Deus PrizfelixNo ratings yet
- Project SynopsisDocument6 pagesProject SynopsisDeepakVyas0% (1)
- Phy ProjectDocument26 pagesPhy ProjecttamannaNo ratings yet
- SME - Metal Enclosed SwitchgearsDocument4 pagesSME - Metal Enclosed SwitchgearsViorel BorsNo ratings yet
- Eaton Xpole Pfim F RCCB Catalog Ca019030en en UsDocument11 pagesEaton Xpole Pfim F RCCB Catalog Ca019030en en UsProcurement PardisanNo ratings yet
- Asmit Semi ReportDocument21 pagesAsmit Semi ReportAsmit PatelNo ratings yet
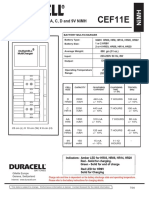
- Duracell CEF11E-manualDocument1 pageDuracell CEF11E-manualIcu LucianNo ratings yet
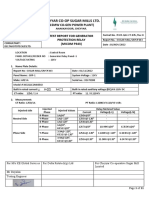
- Cheyyar Co-Op Sugar Mills LTD.: (15Mw Co-Gen Power Plant)Document11 pagesCheyyar Co-Op Sugar Mills LTD.: (15Mw Co-Gen Power Plant)Vijay PitchaiahNo ratings yet
- Appendix A - Transformer Vector Group Codes: Atrt-01/01B S3 User'S Manual Rev 1Document23 pagesAppendix A - Transformer Vector Group Codes: Atrt-01/01B S3 User'S Manual Rev 1natsumyortiz02No ratings yet
- FC 300 DanfossDocument100 pagesFC 300 Danfossiman sulaemanNo ratings yet