Download as pdf or txt
You might also like
- Three Phase AlternatorDocument12 pagesThree Phase AlternatorJohn Anthony Bersabe ChavezNo ratings yet
- Solucionario Cap 2 Máquinas EléctricasDocument48 pagesSolucionario Cap 2 Máquinas EléctricasfernandoNo ratings yet
- ISM To Accompany Electric Machinery and Power System Fundamentals 1 - eDocument2 pagesISM To Accompany Electric Machinery and Power System Fundamentals 1 - eLia PalmaNo ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- Induction Motor QuestionsDocument16 pagesInduction Motor QuestionsOussama SamirNo ratings yet
- Induction Motors 2 2020Document15 pagesInduction Motors 2 2020Jonathan ArturoNo ratings yet
- ELG3311: Assignment 3: Problem 6-12Document15 pagesELG3311: Assignment 3: Problem 6-12Gathy BrayohNo ratings yet
- Induction Motor 2003Document24 pagesInduction Motor 2003hdrzaman9439No ratings yet
- 17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7Document18 pages17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7ming yangNo ratings yet
- 7 - Lecture - Induction MotorsDocument41 pages7 - Lecture - Induction MotorspaurushgodharNo ratings yet
- Chapter 15Document17 pagesChapter 15Keet WongNo ratings yet
- Beee Unit-4 Induction & Synchronous MotorsDocument27 pagesBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNo ratings yet
- Chapter 9 - InductionDocument11 pagesChapter 9 - InductionLin ChongNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Induction - Motor SlidesDocument74 pagesInduction - Motor SlidesShantanu PaulNo ratings yet
- 02 Single Phase Im 02Document8 pages02 Single Phase Im 02Suleiman Abubakar AuduNo ratings yet
- Three-Phase Induction MotorDocument17 pagesThree-Phase Induction MotorAdarsh AdarshNo ratings yet
- Sardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramDocument23 pagesSardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramSANJAYNo ratings yet
- Long Shunt Compound DCDocument3 pagesLong Shunt Compound DChitdogNo ratings yet
- Transformer and Induction MotorDocument55 pagesTransformer and Induction MotorEldeen EscuadroNo ratings yet
- Chapter 5 - Induction MotorDocument26 pagesChapter 5 - Induction MotorarifulNo ratings yet
- Three Phase Induction Motors: List of FormulaeDocument9 pagesThree Phase Induction Motors: List of FormulaekkkNo ratings yet
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 pagesLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Intro To AC Drives 1Document25 pagesIntro To AC Drives 1Nur AinaqilahNo ratings yet
- Assi 2 SolutionDocument10 pagesAssi 2 SolutionabcdNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- CH 3 - Induction MotorsDocument46 pagesCH 3 - Induction MotorsMiz AelyfhaNo ratings yet
- Power Lab A2Document5 pagesPower Lab A2simango4No ratings yet
- Chapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sDocument12 pagesChapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sGiordano Brito RodriguezNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Worked ExamplesDocument11 pagesWorked ExamplesAli AltahirNo ratings yet
- Lecture Note - ED - Speed Control of IMDocument5 pagesLecture Note - ED - Speed Control of IMsashaikhNo ratings yet
- Chap 7 Solutions PDFDocument34 pagesChap 7 Solutions PDFIbrahim Hussain100% (1)
- Asynchronous MachinesDocument34 pagesAsynchronous MachinesAndi FalihNo ratings yet
- 6 Synchronous Machines ExamplesDocument10 pages6 Synchronous Machines Examplessoumikchatterjee1912No ratings yet
- Induction Motor PDFDocument26 pagesInduction Motor PDFishak789100% (1)
- 6-Kontrol Generator SinkronDocument56 pages6-Kontrol Generator SinkronMuhamad Risqi AbdullohNo ratings yet
- Quiz Mesin ListrikDocument8 pagesQuiz Mesin ListrikLarva Anime FunNo ratings yet
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocument12 pagesPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarNo ratings yet
- A Full-Bridge Phase-Shifted Inverter For Induction HeatingDocument78 pagesA Full-Bridge Phase-Shifted Inverter For Induction HeatingCCNo ratings yet
- Tsgenco 2015Document13 pagesTsgenco 2015Abbhinav SanganiNo ratings yet
- Chapter 16Document19 pagesChapter 16Bengt HörbergNo ratings yet
- Maquina Electricas. Sol. Ed5-282-292Document11 pagesMaquina Electricas. Sol. Ed5-282-292Luis BernalNo ratings yet
- Induction Motor ParametersDocument3 pagesInduction Motor ParametersFouad ZebiriNo ratings yet
- Electrical Machines: Induction Motors - NoteDocument41 pagesElectrical Machines: Induction Motors - NotealeeshaNo ratings yet
- Synchronous GeneratorDocument25 pagesSynchronous GeneratorDex LevisNo ratings yet
- Skee4423 AsgDocument12 pagesSkee4423 Asgcheeling1530No ratings yet
- AlxionDocument16 pagesAlxionJoe ArNo ratings yet
- Lab 3Document10 pagesLab 3Vinay RevanuruNo ratings yet
- DC MotorDocument84 pagesDC MotorMuhammad Fajar PrakasaNo ratings yet
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 pagesElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- DC MachinesDocument102 pagesDC MachinesmohamedashrafkotpNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- Bending Moment&SheerForce ExperimentDocument14 pagesBending Moment&SheerForce ExperimentZhenyi OoiNo ratings yet
- Physics GK Questions Answers in English PDFDocument7 pagesPhysics GK Questions Answers in English PDFlatish upadrashtaNo ratings yet
- Solar-Installer-Handbook IEC SchneiderDocument52 pagesSolar-Installer-Handbook IEC SchneiderPutri Vardabella VeshiaNo ratings yet
- Origo EDW 550D - Servicio - 0700161101C INDocument29 pagesOrigo EDW 550D - Servicio - 0700161101C INcarlosNo ratings yet
- Electrical Load ListDocument35 pagesElectrical Load Listsravankotlas100% (2)
- MachinesDocument20 pagesMachinesSalmanNo ratings yet
- PHY103A: Lecture # 1: Semester II, 2017-18 Department of Physics, IIT KanpurDocument13 pagesPHY103A: Lecture # 1: Semester II, 2017-18 Department of Physics, IIT KanpurSABARI BALANo ratings yet
- Pt. Certus Metrology Indonesia Traceability ChartDocument1 pagePt. Certus Metrology Indonesia Traceability ChartAzizah purwitasariNo ratings yet
- 430 232 PDFDocument48 pages430 232 PDFMohammed Al-hewaimelNo ratings yet
- Filter Design Calculation C High Pass Notch High Pass FiltersDocument73 pagesFilter Design Calculation C High Pass Notch High Pass FilterspvenkyNo ratings yet
- Q874 Analog ElectronicsDocument2 pagesQ874 Analog ElectronicsDivyanshu BoseNo ratings yet
- Test Method For Determination of Valve Flow CoefficientDocument14 pagesTest Method For Determination of Valve Flow CoefficientCharan KumarNo ratings yet
- TG14 Version 3 July 2019Document7 pagesTG14 Version 3 July 2019Donig FermanianNo ratings yet
- Answer SheetDocument2 pagesAnswer SheetKirsty SebastianNo ratings yet
- Quantity and Price Conversion Chart: Quantity Comparison Pricing ComparisonDocument1 pageQuantity and Price Conversion Chart: Quantity Comparison Pricing ComparisonNMHaNo ratings yet
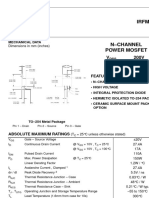
- V 200V I 27.4A R 0.100: FeaturesDocument2 pagesV 200V I 27.4A R 0.100: FeaturesWilson Yecit OrtizNo ratings yet
- Module 5 Kinematics of Rigid Bodies Common QuestionsDocument7 pagesModule 5 Kinematics of Rigid Bodies Common QuestionsLeo TallerNo ratings yet
- Design For Wear Resistance: Raymond G. Bayer, Tribology ConsultantDocument12 pagesDesign For Wear Resistance: Raymond G. Bayer, Tribology Consultanttolentino.jason1222No ratings yet
- PCXZAM15 Air-Cooled Scroll Modular ChillerDocument12 pagesPCXZAM15 Air-Cooled Scroll Modular ChillerAsyraf ZaidiNo ratings yet
- 9702 p1 Work Energy Power 2014Document36 pages9702 p1 Work Energy Power 2014Farhad AhmedNo ratings yet
- ALTERNATEUR C275 UCDI274K-311-TD-EN - Rev - ADocument9 pagesALTERNATEUR C275 UCDI274K-311-TD-EN - Rev - Aguy doohNo ratings yet
- Electricity and Magnetism TDA Writing RepsonseDocument2 pagesElectricity and Magnetism TDA Writing RepsonseAnonymous cAOc8lc5PRNo ratings yet
- 5MKM100RVMV Multi NX R32 Data Engineering EDAVN121718Document1 page5MKM100RVMV Multi NX R32 Data Engineering EDAVN121718Permana PutraNo ratings yet
- Isolation TransformerDocument3 pagesIsolation Transformermaythamjasim7No ratings yet
- Chapter Six Compressors: Air CompressorDocument8 pagesChapter Six Compressors: Air CompressorMicky AlemuNo ratings yet
- (TDB) DVM Chiller For Europe Ver.2.2 - 170223Document66 pages(TDB) DVM Chiller For Europe Ver.2.2 - 170223ORLANDO CASTRONo ratings yet
- 02 Drilling CalculationDocument53 pages02 Drilling CalculationMohammad Kamal Habbaba67% (3)
- CBSE Class 12 Physics Practicals 2023 24Document4 pagesCBSE Class 12 Physics Practicals 2023 24Ayush SharmaNo ratings yet
- Neexgent LiFePO4 Battery Cells 3.2V 26ahDocument1 pageNeexgent LiFePO4 Battery Cells 3.2V 26ahCherry HeNo ratings yet
- Vari-Green Motor: Start Saving NowDocument4 pagesVari-Green Motor: Start Saving NowRandy HawkinsNo ratings yet