Download as pdf or txt
You might also like
- Mechanical Measurements - 4Document14 pagesMechanical Measurements - 4فضائح لا تصدقNo ratings yet
- f342 Proc Control 10Document26 pagesf342 Proc Control 10Hardik HurkatNo ratings yet
- By Assist. Prof. Dr. Karim H. Ali 2019-2020 21 May 2020Document17 pagesBy Assist. Prof. Dr. Karim H. Ali 2019-2020 21 May 2020Ali MadridNo ratings yet
- Tut 8 DriveDocument10 pagesTut 8 Drivemennaabdelrazik848No ratings yet
- All FormulasDocument32 pagesAll Formulasuzairazizsuria1No ratings yet
- Aim-To Simulate Analysis Current and Voltage in Step Response of RLC Circuit Without Any InitiallyDocument4 pagesAim-To Simulate Analysis Current and Voltage in Step Response of RLC Circuit Without Any Initiallysaksham mahajanNo ratings yet
- Lab 8 & 9Document12 pagesLab 8 & 9saadshahab622No ratings yet
- Frequency Response With MATLAB ExamplesDocument107 pagesFrequency Response With MATLAB ExamplesDisco JockeyNo ratings yet
- 5 Reciprocating Compressor SelectionDocument27 pages5 Reciprocating Compressor SelectionHazem RamdanNo ratings yet
- Formulae, Tables and Guidance Notes For Examination PDFDocument31 pagesFormulae, Tables and Guidance Notes For Examination PDF123No ratings yet
- Heat Design Problem 2Document21 pagesHeat Design Problem 2Samir YehyaNo ratings yet
- 2 - RequirementsInTimeDomainDocument11 pages2 - RequirementsInTimeDomainLenduhaNo ratings yet
- Std-EEE F 342 - Mod-3 - L 20 To 22 (AC Modelling)Document48 pagesStd-EEE F 342 - Mod-3 - L 20 To 22 (AC Modelling)DEEPIKA PANTNo ratings yet
- Lahams 2Document10 pagesLahams 2Anthony MacalindongNo ratings yet
- Formula Sheet For ICT - 3Document2 pagesFormula Sheet For ICT - 3kazeemsodikisola1991No ratings yet
- First Order Transfer FunctionDocument10 pagesFirst Order Transfer FunctionAnbarwitaNo ratings yet
- AF 1 Tarea Presión MaldonadoDocument7 pagesAF 1 Tarea Presión MaldonadoArmando MaldonadoNo ratings yet
- Formulario Yaci IVDocument2 pagesFormulario Yaci IVFranciscoCamberoNo ratings yet
- Automotive Electronics Laboratory JournalDocument11 pagesAutomotive Electronics Laboratory JournalanushkaNo ratings yet
- Lecture 2Document49 pagesLecture 2tommy6700No ratings yet
- Intro Dynamic EsimationDocument9 pagesIntro Dynamic Esimationoussama sadkiNo ratings yet
- Heat X Prob 4Document21 pagesHeat X Prob 4Samir YehyaNo ratings yet
- Shunt Voltage RegulatorDocument4 pagesShunt Voltage RegulatorSamuel mutindaNo ratings yet
- Plug Flow ReactorDocument8 pagesPlug Flow ReactorJeresse PelarejaNo ratings yet
- 03a - 05 - MÉTODOS DE CÁLCULO DE LA ESTRUCTURA EN SITUACIÓN DE INCENDIO-1Document28 pages03a - 05 - MÉTODOS DE CÁLCULO DE LA ESTRUCTURA EN SITUACIÓN DE INCENDIO-1Juan Jairo Macias HenaoNo ratings yet
- Excentrica 6 DDocument5 pagesExcentrica 6 DMao Cristhian Pinto CruzNo ratings yet
- OBRA DE CAPTACIÓN GRUPO A - ContinuacionDocument7 pagesOBRA DE CAPTACIÓN GRUPO A - ContinuacionJonathan Sanchez MoraNo ratings yet
- Project 2: Abstract - This Paper Presents An Analysis On Designing A Converter With Interface TheDocument14 pagesProject 2: Abstract - This Paper Presents An Analysis On Designing A Converter With Interface TheYusri JumatNo ratings yet
- PEP 2020 Phase 2 Selection Test 5 - SolutionDocument9 pagesPEP 2020 Phase 2 Selection Test 5 - SolutionMarcus PoonNo ratings yet
- First QuestionDocument10 pagesFirst QuestionNoman RazaNo ratings yet
- Voltage and Current DividerDocument16 pagesVoltage and Current DividerVitaliana VillaverdeNo ratings yet
- Appendices C: Computation Standardization of NaohDocument6 pagesAppendices C: Computation Standardization of NaohJensen Myles CollasNo ratings yet
- Course In-Charge: Sir Ahad ManzoorDocument3 pagesCourse In-Charge: Sir Ahad ManzoorNoman RazaNo ratings yet
- Tabla Procesos TermodinámicosDocument1 pageTabla Procesos TermodinámicosDiana FloresNo ratings yet
- Analysis and Design of Doubly Reinforced BeamDocument18 pagesAnalysis and Design of Doubly Reinforced BeamKherstine Muyano TantayNo ratings yet
- Solutions TutorialDocument156 pagesSolutions TutorialCorrado MulasNo ratings yet
- AER602 SummaryDocument2 pagesAER602 Summarymuhammad.shibl.imamNo ratings yet
- Correcao Do Primeiro TesteDocument3 pagesCorrecao Do Primeiro TesteNaz ExplanationNo ratings yet
- Midterm Exam Model 2 - Answer ModelDocument4 pagesMidterm Exam Model 2 - Answer ModelMaher Gomaa IsmaeelNo ratings yet
- Preinforme 3Document8 pagesPreinforme 3Andres Felipe MozoNo ratings yet
- Ac Machinery FormulasDocument4 pagesAc Machinery FormulasNhilNo ratings yet
- Curs3site PDFDocument38 pagesCurs3site PDFGigi FloricaNo ratings yet
- Transformers Numericals Vol. 2 Qtns and SolutionsDocument12 pagesTransformers Numericals Vol. 2 Qtns and SolutionsBaluku DavidNo ratings yet
- Kelompok 3 - Tugas 6 - TRK2-03-dikonversiDocument30 pagesKelompok 3 - Tugas 6 - TRK2-03-dikonversiMuhammad AzharNo ratings yet
- Formulario Compresor Axial 2Document4 pagesFormulario Compresor Axial 2Julio Eme-ErreNo ratings yet
- PruebaDocument6 pagesPruebamaquina1No ratings yet
- Derivation of Process Calculation For Ideal GasesDocument19 pagesDerivation of Process Calculation For Ideal GasesMuhammad AbdullahNo ratings yet
- Compilation of Formula: Clinical ChemistryDocument4 pagesCompilation of Formula: Clinical ChemistryJillan MarieNo ratings yet
- MachineLearning PDFDocument94 pagesMachineLearning PDFKamal BoulefraNo ratings yet
- EEE2044S 2021 Exam Formula SheetDocument2 pagesEEE2044S 2021 Exam Formula SheetChristine PiusNo ratings yet
- Lecture 28 Thermal Engineering II (09.09.2020)Document71 pagesLecture 28 Thermal Engineering II (09.09.2020)Dr. BIBIN CHIDAMBARANATHANNo ratings yet
- Time Response of The Dynamical SystemsDocument55 pagesTime Response of The Dynamical Systemsİsmail BozkurtNo ratings yet
- Progress Report - Maria IndiraDocument12 pagesProgress Report - Maria Indirasafira andrianiNo ratings yet
- EquationsDocument1 pageEquationsسيف جمال مدين عبداللهNo ratings yet
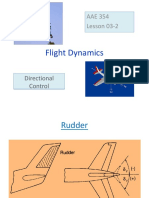
- Lec 03-2 - Directional ControlDocument17 pagesLec 03-2 - Directional ControlArslan MehmoodNo ratings yet
- F342 Proc Control 16Document10 pagesF342 Proc Control 16Hardik HurkatNo ratings yet
- f342 Proc Dyns 03Document18 pagesf342 Proc Dyns 03Hardik HurkatNo ratings yet
- F342 Proc Control 19Document12 pagesF342 Proc Control 19Hardik HurkatNo ratings yet
- Process Dynamics & Control: CHE F 342Document9 pagesProcess Dynamics & Control: CHE F 342Hardik HurkatNo ratings yet
- F342 Proc Control 12Document7 pagesF342 Proc Control 12Hardik HurkatNo ratings yet
- f342 Proc Control 10Document26 pagesf342 Proc Control 10Hardik HurkatNo ratings yet
- F342 Proc Control 14Document25 pagesF342 Proc Control 14Hardik HurkatNo ratings yet
- Design Development of A Powertrain System in Scope of Baja Vehicle-IJAERDV05I1278626 PDFDocument13 pagesDesign Development of A Powertrain System in Scope of Baja Vehicle-IJAERDV05I1278626 PDFHardik HurkatNo ratings yet
- Powertrain Calculations 19-20Document4 pagesPowertrain Calculations 19-20Hardik HurkatNo ratings yet
- Grading SheetDocument5 pagesGrading SheetnhaaileenNo ratings yet
- PD D27 09L 02e - 609 - PDMDocument8 pagesPD D27 09L 02e - 609 - PDMratheeshkumardNo ratings yet
- SF-VIK003-S-WIP - Video Intercom Indoor Station - Configuration Guide - V2.1.10Document44 pagesSF-VIK003-S-WIP - Video Intercom Indoor Station - Configuration Guide - V2.1.10Antonio RitoNo ratings yet
- Middle Ware 101Document13 pagesMiddle Ware 101Blue VelaNo ratings yet
- Commandcentral Body Worn and In-Car Video Deployment User GuideDocument43 pagesCommandcentral Body Worn and In-Car Video Deployment User GuideRichard Jagan Graham SnrNo ratings yet
- PDF Studio 2019 User GuideDocument621 pagesPDF Studio 2019 User GuideQoppa SoftwareNo ratings yet
- PLANNINGLMC Case Study DelhiDocument34 pagesPLANNINGLMC Case Study DelhiPHOTOPHILE FOCUSNo ratings yet
- James Cristopher O. Reyes: ProfileDocument2 pagesJames Cristopher O. Reyes: ProfileRaymond RamirezNo ratings yet
- Fabia 2 AccessoriesDocument17 pagesFabia 2 Accessoriespastir89No ratings yet
- M071038 Xgard Consolidated Manual Issue 1 June 18Document76 pagesM071038 Xgard Consolidated Manual Issue 1 June 18Emrh YsltsNo ratings yet
- Rec670 Iec61850 Pixit 2.2Document21 pagesRec670 Iec61850 Pixit 2.2Ho Van ToanNo ratings yet
- Ieee Research Papers On Touch Screen TechnologyDocument6 pagesIeee Research Papers On Touch Screen Technologyzyjulejup0p3100% (1)
- Curriculum Vitae RamakrishnaDocument4 pagesCurriculum Vitae RamakrishnaRama KrishnaNo ratings yet
- EnerMech Valve SupplyDocument4 pagesEnerMech Valve SupplyZulhilmi ZalizanNo ratings yet
- Engineering Manager Senior Project Manager in Marietta Atlanta GA Resume Jeremy RichardDocument2 pagesEngineering Manager Senior Project Manager in Marietta Atlanta GA Resume Jeremy RichardJeremyRichardNo ratings yet
- Chapter 2Document41 pagesChapter 2sitiNo ratings yet
- Concurrent EngineeringDocument3 pagesConcurrent EngineeringanurajNo ratings yet
- Word Lesson PlanDocument3 pagesWord Lesson PlanAmissah SethNo ratings yet
- Instruction Manual Pfaff 335Document44 pagesInstruction Manual Pfaff 335Dim MNo ratings yet
- OmicronSKYS4R5HE43.4 50-55degcDocument4 pagesOmicronSKYS4R5HE43.4 50-55degcDuc TuNo ratings yet
- Snowflake - Certforall.snowpro Core - free.PDF.2023 Oct 02.by - Levi.182q.vceDocument26 pagesSnowflake - Certforall.snowpro Core - free.PDF.2023 Oct 02.by - Levi.182q.vcesaipriyacooolNo ratings yet
- Csit101 Midterm CollabDocument5 pagesCsit101 Midterm Collabapi-266897183No ratings yet
- 2202 - Gates Field BulletinDocument2 pages2202 - Gates Field BulletinMichał WłodarkiewiczNo ratings yet
- Electronic Engineer CVDocument3 pagesElectronic Engineer CVAbdoAbuzantNo ratings yet
- FS-Elliott's Regulus Control System Retrofit ProgramDocument2 pagesFS-Elliott's Regulus Control System Retrofit ProgramCurtis BuffingtonNo ratings yet
- Paper 9Document5 pagesPaper 9venkatesh maduthuriNo ratings yet
- Mrs. Fields CookiesDocument22 pagesMrs. Fields Cookiesrudranild0% (1)
- Dmytro Zholobak Resume 1Document2 pagesDmytro Zholobak Resume 1DmytroZNo ratings yet
- Base24 zOSDocument198 pagesBase24 zOSaksmsaidNo ratings yet
- Pressure Testing The Intake & Exhaust Sys at One TimeDocument2 pagesPressure Testing The Intake & Exhaust Sys at One Timejaime roblesNo ratings yet