Download as pdf or txt
You might also like
- Space Pirates Eperusal v6 PDFDocument52 pagesSpace Pirates Eperusal v6 PDFYoyo Chan100% (2)
- Aerodynamics & Space Dynamics: Gate AerospaceDocument20 pagesAerodynamics & Space Dynamics: Gate Aerospacekkkraja100% (2)
- Mae 3241: Aerodynamics and Flight Mechanics: Finite Wings: General Lift Distribution SummaryDocument21 pagesMae 3241: Aerodynamics and Flight Mechanics: Finite Wings: General Lift Distribution SummaryCris M Rodríguez BNo ratings yet
- Supersonic AerodynamicsDocument54 pagesSupersonic AerodynamicsLuis Daniel Guzman GuillenNo ratings yet
- Worldbuilding Blueprint TemplateDocument63 pagesWorldbuilding Blueprint Templateapi-545773825No ratings yet
- Babylonian AstrologyDocument5 pagesBabylonian Astrologyapi-273938320No ratings yet
- Space Dynamics - Problem Sheet Level 2Document2 pagesSpace Dynamics - Problem Sheet Level 2Mohit kumar0% (1)
- Aircraft PerformanceDocument2 pagesAircraft PerformanceAishwarya Ravi0% (1)
- Aircraft Performance-2 PDFDocument6 pagesAircraft Performance-2 PDFkkkrajaNo ratings yet
- Entry Vehicle AerodynamicsDocument19 pagesEntry Vehicle AerodynamicsJam OneNo ratings yet
- MAE3241 Ch01 IntroductionDocument20 pagesMAE3241 Ch01 Introductionmblaskovich2010No ratings yet
- Paper 1Document24 pagesPaper 1jair_No ratings yet
- Elements of Airplane Performance: ME 4021: Flight Dynamics Fazle Rabbi SirDocument42 pagesElements of Airplane Performance: ME 4021: Flight Dynamics Fazle Rabbi SirRafiqul IslamNo ratings yet
- Reentry Timeline and EventsDocument25 pagesReentry Timeline and Eventsanon_557098088No ratings yet
- Summary - Flight Mechanics PDFDocument59 pagesSummary - Flight Mechanics PDFPythonraptorNo ratings yet
- Report of Parachute Fabrication by Logadhasan S/o Suwedan (3 SKMT)Document33 pagesReport of Parachute Fabrication by Logadhasan S/o Suwedan (3 SKMT)Logadhasan SuwedanNo ratings yet
- 1969093432Document52 pages1969093432bambsoeNo ratings yet
- Space Dynamics ClassroomexamDocument8 pagesSpace Dynamics ClassroomexamCrystal KingNo ratings yet
- GATE Aerospace Coaching by Team IGC Aircraft StabilityDocument13 pagesGATE Aerospace Coaching by Team IGC Aircraft StabilityNISHANT100% (1)
- Linear AerodynamicsDocument45 pagesLinear Aerodynamicsparvaz747No ratings yet
- Unit 1 Notes Aircraft Stability and Control NotesDocument18 pagesUnit 1 Notes Aircraft Stability and Control NotesMatthew RhoneyNo ratings yet
- Some Basic Concepts: 1.1 Newtons Law and Inertial FramesDocument16 pagesSome Basic Concepts: 1.1 Newtons Law and Inertial Framesabrarn179208No ratings yet
- Prof. K. Ramamurthi Prof. S. Varunkumar: Aerospace EngineeringDocument998 pagesProf. K. Ramamurthi Prof. S. Varunkumar: Aerospace EngineeringKannan RamarajNo ratings yet
- Orbital MechanicsDocument28 pagesOrbital MechanicsMartin Schweighart MoyaNo ratings yet
- Aircraft Stability and ControlDocument21 pagesAircraft Stability and Controlexplorer8111No ratings yet
- Staging and Ascent Trajectory: CVA 2011summer SchoolDocument32 pagesStaging and Ascent Trajectory: CVA 2011summer SchoolMuhammad Ishaq KhanNo ratings yet
- Structural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDocument20 pagesStructural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDamo Daran GNo ratings yet
- Supersonic PDFDocument10 pagesSupersonic PDFVijay ChandarNo ratings yet
- A New Method of Atmospheric Reentry For Space ShipsDocument7 pagesA New Method of Atmospheric Reentry For Space ShipsN. SWAROOP KUMARNo ratings yet
- Linear Theories For 2D Airfoil in Unsteady FlowDocument18 pagesLinear Theories For 2D Airfoil in Unsteady FlowSri Vatsan100% (1)
- AERODYNAMICSDocument60 pagesAERODYNAMICSvenkatakrishnan srinivasanNo ratings yet
- FLIGHTMECHANICSDocument48 pagesFLIGHTMECHANICSvenkatakrishnan srinivasanNo ratings yet
- Aerodynamics 3Document4 pagesAerodynamics 3kkkraja100% (1)
- Gate Aerospace Flight MechanicsDocument11 pagesGate Aerospace Flight Mechanicsvenkatakrishnan srinivasanNo ratings yet
- Compressible Flow-AerothermodynamicsDocument44 pagesCompressible Flow-AerothermodynamicsGohar KhokharNo ratings yet
- Igc - Gate - Aerospace - Space DynamicsDocument53 pagesIgc - Gate - Aerospace - Space Dynamicsvenkatakrishnan srinivasanNo ratings yet
- Space Dynamics PDFDocument11 pagesSpace Dynamics PDFrakhi sonu2000100% (2)
- Aircraft Flight Dynamics 2015 - 04 - 13 PDFDocument34 pagesAircraft Flight Dynamics 2015 - 04 - 13 PDFWii RodriguezNo ratings yet
- GATE AerospaceDocument3 pagesGATE AerospacevararajuNo ratings yet
- Flight Mechanics Sample Complete PDFDocument27 pagesFlight Mechanics Sample Complete PDFkkkraja67% (3)
- Aerodynamics II Lecture NotesDocument17 pagesAerodynamics II Lecture NotesSuman.S100% (1)
- Gate Flight Mechanics by VayushastraDocument36 pagesGate Flight Mechanics by Vayushastraudaykumar100% (5)
- ADDocument491 pagesADSwagat DasNo ratings yet
- Airplane Stability and Control Notes GATE Aerospace EngineeringDocument31 pagesAirplane Stability and Control Notes GATE Aerospace Engineeringabrarn179208100% (4)
- Aircraft Design Project 2Document120 pagesAircraft Design Project 2Sandeep NrynNo ratings yet
- Constraint DiagramsDocument18 pagesConstraint Diagramsomga747No ratings yet
- AEroelasticityDocument61 pagesAEroelasticityKashif AyazNo ratings yet
- CHP 1 HypersonicsDocument76 pagesCHP 1 HypersonicsAbhinivesh Beechook100% (1)
- Aircraft StabilityDocument126 pagesAircraft StabilitymunirnadirNo ratings yet
- Low-Reynolds-Number Airfoil DesignDocument9 pagesLow-Reynolds-Number Airfoil Designamir_karimiNo ratings yet
- CH 2 Problems SheetDocument3 pagesCH 2 Problems SheetqzakryaNo ratings yet
- Aircraft Performance NPTELDocument538 pagesAircraft Performance NPTELShabbir Ali100% (2)
- High Speed AerodynamicsDocument62 pagesHigh Speed AerodynamicsDavid Bond100% (2)
- Aircraft Structures Notes 1Document200 pagesAircraft Structures Notes 1WizardWannabeNo ratings yet
- Rr312102 Aircraft PerformanceDocument8 pagesRr312102 Aircraft PerformanceSrinivasa Rao GNo ratings yet
- Space Flight MechanicsDocument35 pagesSpace Flight MechanicsBorisBenedikterNo ratings yet
- Ch1-Birth of Modern PhysicsDocument17 pagesCh1-Birth of Modern PhysicsMartín FigueroaNo ratings yet
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Introduction Orb MechanicsDocument9 pagesIntroduction Orb MechanicsParag MahajaniNo ratings yet
- Full Gravityand Inertia Printedrevised 2Document8 pagesFull Gravityand Inertia Printedrevised 2satish acu-healerNo ratings yet
- Ch1 Newton MechanicsDocument16 pagesCh1 Newton MechanicsRana JahanzaibNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- M Marketing 5th Edition Grewal Test Bank 1Document36 pagesM Marketing 5th Edition Grewal Test Bank 1alexakeithrxjcitnsmk100% (35)
- A Detailed Lesson in Science Grade 10Document3 pagesA Detailed Lesson in Science Grade 10Vanessa BoncalesNo ratings yet
- Gold Exp B1P U2 Lang Test ADocument4 pagesGold Exp B1P U2 Lang Test AMaria SolNo ratings yet
- Winter Edition NewsletterDocument47 pagesWinter Edition NewsletterMario TaracenaNo ratings yet
- Pingree - A Greek Ephemeris For 796Document4 pagesPingree - A Greek Ephemeris For 796Homo ByzantinusNo ratings yet
- Evidencia Presentacion GA2 240202501 AA2 EV02Document5 pagesEvidencia Presentacion GA2 240202501 AA2 EV02temistonosNo ratings yet
- Sunset StoryDocument2 pagesSunset Storyaminaizzy.qureshistarNo ratings yet
- Discussion: Mystery Presented A Stridently Copernican Worldview Dedicated To Drawing TogetherDocument3 pagesDiscussion: Mystery Presented A Stridently Copernican Worldview Dedicated To Drawing TogetherjunjurunjunNo ratings yet
- Reading in Philippine History: Milben T. Paras Beed 1BDocument5 pagesReading in Philippine History: Milben T. Paras Beed 1BDanny FelixNo ratings yet
- Semester End Examinations - July / August 2022: Instructions To The CandidatesDocument2 pagesSemester End Examinations - July / August 2022: Instructions To The CandidatesBharathNo ratings yet
- Grade 11 STEM SubjectsDocument4 pagesGrade 11 STEM SubjectsNikka N. Nazario100% (1)
- 4 - Development of ScienceDocument34 pages4 - Development of ScienceALLYSON BURAGANo ratings yet
- Gep0502 Week 7Document59 pagesGep0502 Week 7rawadNo ratings yet
- Interpreting Mrs YenDocument67 pagesInterpreting Mrs YenVõ Yến NhungNo ratings yet
- 1 Whispers of The Cosmic TapestryDocument2 pages1 Whispers of The Cosmic TapestryMarsuki HardjoNo ratings yet
- TrigonometryDocument181 pagesTrigonometrymark4102No ratings yet
- Untitled Screenplay PDFDocument3 pagesUntitled Screenplay PDFJonathon BookerNo ratings yet
- KP Table With Bhukti Sub-Periods + Stars & Padas FeaturesDocument7 pagesKP Table With Bhukti Sub-Periods + Stars & Padas FeaturesAnil Verma100% (1)
- Module 1 ForcesDocument18 pagesModule 1 ForcesRochelle Mae G. IrincoNo ratings yet
- ATG - Earth Science Week 1Document11 pagesATG - Earth Science Week 1wendel junioNo ratings yet
- Mythology MagazineDocument1 pageMythology Magazineapi-292802958No ratings yet
- X-Ray Style Disease by SlidesgoDocument51 pagesX-Ray Style Disease by SlidesgoJohn VitorNo ratings yet
- Nahik Sinnar District MapDocument1 pageNahik Sinnar District MapText81No ratings yet
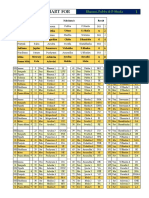
- Tarabala Chart For: Sampath Kritika G U.Shada Sun UttaraDocument1 pageTarabala Chart For: Sampath Kritika G U.Shada Sun UttaraBrahmanandam BittlaNo ratings yet
- Module No. 1 Sci TechDocument8 pagesModule No. 1 Sci TechRhea PaguigbaoNo ratings yet
- Physical Science - M1-M2 Q4Document4 pagesPhysical Science - M1-M2 Q4Janna PleteNo ratings yet
- Star - WikipediaDocument227 pagesStar - WikipediaSharlyn SefanieJamzelian A PedroNo ratings yet