
Mitsukuri 2014
Mitsukuri 2014
You might also like
- Design of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkDocument10 pagesDesign of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkKrishna ReddyNo ratings yet
- Energies 13 03784Document22 pagesEnergies 13 03784Zakaria AzizNo ratings yet
- Voltage Control in Power SystemsDocument15 pagesVoltage Control in Power SystemsAshok PalakondaNo ratings yet
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBHARADWAJ CHIVUKULANo ratings yet
- Multistage Time-Variant EV Load Modelling For Capturing EV BehaviourDocument12 pagesMultistage Time-Variant EV Load Modelling For Capturing EV BehaviourAndresNo ratings yet
- Ishaq 2016Document7 pagesIshaq 2016Bách Tạ DuyNo ratings yet
- EV Method PVDocument12 pagesEV Method PVV S R PAVAN KUMAR NEELINo ratings yet
- Loss Minimization For Distributed PV Integration Using Particle Swarm Optimization With Volt-Var ControlDocument5 pagesLoss Minimization For Distributed PV Integration Using Particle Swarm Optimization With Volt-Var ControlANJU YADAVNo ratings yet
- Behavioral Characterization of Electric Vehicle Charging Loads in A Distribution Power Grid Through Modeling of Battery ChargersDocument10 pagesBehavioral Characterization of Electric Vehicle Charging Loads in A Distribution Power Grid Through Modeling of Battery ChargersAndres Arias LondoñoNo ratings yet
- A 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargeDocument16 pagesA 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargePRAMOD PATIDARNo ratings yet
- 1 s2.0 S0360544217317887 MainDocument14 pages1 s2.0 S0360544217317887 MainChrisHang DuNo ratings yet
- Analysis of Power Factor Correction of PV-Grid Interconnected System PDFDocument6 pagesAnalysis of Power Factor Correction of PV-Grid Interconnected System PDFRabindra SinghNo ratings yet
- IEEE 2014 - Impacts of Electric Vehicles On The Transient Voltage Stability of Distribution Network and The Study of Improvement MeasuresDocument6 pagesIEEE 2014 - Impacts of Electric Vehicles On The Transient Voltage Stability of Distribution Network and The Study of Improvement MeasuresCarlos VidalesNo ratings yet
- Development of Dynamic EV Load Model For Power System Oscillatory Stability StudiesDocument6 pagesDevelopment of Dynamic EV Load Model For Power System Oscillatory Stability StudiesTareq AzizNo ratings yet
- Energies: Voltage Control Strategy For Energy Storage System in Sustainable Distribution System OperationDocument12 pagesEnergies: Voltage Control Strategy For Energy Storage System in Sustainable Distribution System OperationKanna1927No ratings yet
- 3 A Systematic PVQV Curves WaleedDocument6 pages3 A Systematic PVQV Curves Waleedwalid khanNo ratings yet
- Analysis of Distributed Generation OperaDocument10 pagesAnalysis of Distributed Generation OperaNasiru BelloNo ratings yet
- Distribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsDocument11 pagesDistribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsEvellyne ChrisNo ratings yet
- Modeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive BuildingDocument21 pagesModeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive Buildingsurisetti amruthaNo ratings yet
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDocument8 pagesSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerNo ratings yet
- MT - MFT 202101 0015Document9 pagesMT - MFT 202101 0015Ardhito PrimatamaNo ratings yet
- A Bio-Inspired Optimizer Based Ann Controller For Ev Charging Station With Grid Tied PV SystemDocument17 pagesA Bio-Inspired Optimizer Based Ann Controller For Ev Charging Station With Grid Tied PV SystemViswanathanBalajiNo ratings yet
- Capacity Determination of A Battery Energy Storage System Based On The Control Performance of Load Leveling and Voltage ControlDocument9 pagesCapacity Determination of A Battery Energy Storage System Based On The Control Performance of Load Leveling and Voltage ControlxNo ratings yet
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBrightworld ProjectsNo ratings yet
- Short-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemDocument9 pagesShort-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemEric GalvánNo ratings yet
- Optimal Ev Charging Control Strategy Based On DC Microgrid: SciencedirectDocument5 pagesOptimal Ev Charging Control Strategy Based On DC Microgrid: SciencedirectIsrael JosueNo ratings yet
- Fin Irjmets1651552661Document20 pagesFin Irjmets1651552661Jonathan ManzakiNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument11 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationAra AkramNo ratings yet
- Voltage Stability Analysis: Simulation Versus Dynamic SimulationDocument6 pagesVoltage Stability Analysis: Simulation Versus Dynamic Simulationsreekantha2013No ratings yet
- Application of Small-Sized SMES in An EV Charging Station With DC Bus and PV SystemDocument6 pagesApplication of Small-Sized SMES in An EV Charging Station With DC Bus and PV SystemBALASUNDAR CNo ratings yet
- Design of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkDocument10 pagesDesign of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkKrishna ReddyNo ratings yet
- A Dynamic Operational Scheme For ResidentialDocument10 pagesA Dynamic Operational Scheme For Residentialmalekpour_ahmadNo ratings yet
- Comparative Aspects of Single & Multiple PV Arrays Connected With UPQCDocument8 pagesComparative Aspects of Single & Multiple PV Arrays Connected With UPQCInternational Journal of computational Engineering research (IJCER)No ratings yet
- Active Distribution Management System Based On Smart Inverter Control of PV ESS Integrated SystemDocument10 pagesActive Distribution Management System Based On Smart Inverter Control of PV ESS Integrated SystemChawanakorn WoraphanNo ratings yet
- Local Voltage-Stability Index Using Tellegen's Theorem: Cite This PaperDocument10 pagesLocal Voltage-Stability Index Using Tellegen's Theorem: Cite This PaperAhmedNo ratings yet
- Incorporation of A New Wind Turbine Generating System Model Into Distribution Systems Load Flow AnalysisDocument16 pagesIncorporation of A New Wind Turbine Generating System Model Into Distribution Systems Load Flow AnalysisBahtiyarDursunNo ratings yet
- 1.a Survey of Influence of Electrics Vehicle Charging On Power GridDocument5 pages1.a Survey of Influence of Electrics Vehicle Charging On Power GridpengNo ratings yet
- Utilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulDocument13 pagesUtilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulPrince Janesh UniqueNo ratings yet
- Impact of Dynamic Phevs Load On Renewable Sources Based Distribution SystemDocument6 pagesImpact of Dynamic Phevs Load On Renewable Sources Based Distribution SystemTareq AzizNo ratings yet
- Loadability EnhancementDocument1 pageLoadability Enhancementsunil8080No ratings yet
- Ashabani 3Document15 pagesAshabani 3happyworryNo ratings yet
- 1 s2.0 S2090447922003719 MainDocument16 pages1 s2.0 S2090447922003719 Maintuangsiong ShuNo ratings yet
- Grid Connected Electric Vehicle Charging Station Using PV SourceDocument4 pagesGrid Connected Electric Vehicle Charging Station Using PV Sourcesurya kNo ratings yet
- Red DEv and Tripathi Journal PaperDocument10 pagesRed DEv and Tripathi Journal PaperMichael Zontche BernardNo ratings yet
- Control of Energy Storage Interface With Abidirectional Converter For Photovoltaic SystemsDocument6 pagesControl of Energy Storage Interface With Abidirectional Converter For Photovoltaic SystemsLanstein Joe E PNo ratings yet
- +design and Implementation of A Low CostDocument9 pages+design and Implementation of A Low CostmabhatNo ratings yet
- Verma 2018Document6 pagesVerma 2018Avidip DeyNo ratings yet
- Reactive Power Sharing in Ship Energy Systems With Shaft GeneratorsDocument18 pagesReactive Power Sharing in Ship Energy Systems With Shaft GeneratorsFares MalakNo ratings yet
- Cjee 2023 0020Document12 pagesCjee 2023 0020Dr O H GuptaNo ratings yet
- Applied SciencesDocument17 pagesApplied Sciencesvkr tsNo ratings yet
- 15 3 1Document13 pages15 3 1Amruth RajuNo ratings yet
- Weakest Location Exploration in IEEE-14 Bus SystemDocument8 pagesWeakest Location Exploration in IEEE-14 Bus SystemPaul WanjoliNo ratings yet
- Noorulameen 2018Document5 pagesNoorulameen 2018t64008No ratings yet
- Modeling Harmonic Impacts of Electric Vehicle Chargers On DistribDocument9 pagesModeling Harmonic Impacts of Electric Vehicle Chargers On DistribLight SpeedNo ratings yet
- Research ArticleDocument22 pagesResearch Articleoctober87No ratings yet
- A Joint Control With Variable ZVS Angles For Dynamic Efficiency Optimization in Wireless Power Transfer SystemDocument18 pagesA Joint Control With Variable ZVS Angles For Dynamic Efficiency Optimization in Wireless Power Transfer SystemMd Aurongjeb PoltowNo ratings yet
- Equipment Loading and Voltage Unbalance in The Distribution Network With Distributed PvsDocument6 pagesEquipment Loading and Voltage Unbalance in The Distribution Network With Distributed PvsJuanJesúsPorrasGonzálezNo ratings yet
- ICCET-2021 Paper 17Document16 pagesICCET-2021 Paper 17Ravi KankaleNo ratings yet
- Emerging Trends in Distributed GeneratioDocument189 pagesEmerging Trends in Distributed GeneratioRavi KankaleNo ratings yet
- G H Raisoni Institute of Engineering & Technology: Instructions To Paper Setter/ModeratorDocument3 pagesG H Raisoni Institute of Engineering & Technology: Instructions To Paper Setter/ModeratorRavi KankaleNo ratings yet
- Invoice Tax Invoice: Zoom W-9Document2 pagesInvoice Tax Invoice: Zoom W-9Ravi KankaleNo ratings yet
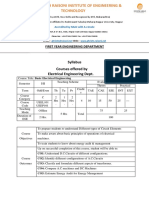
- Syllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentDocument5 pagesSyllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentRavi KankaleNo ratings yet
- Remuneration FormDocument1 pageRemuneration FormRavi KankaleNo ratings yet
- Power Quality Event Generation in MATLAB/Simulink EnvironmentDocument5 pagesPower Quality Event Generation in MATLAB/Simulink EnvironmentRavi KankaleNo ratings yet
- Internal Partial Discharge in Cavity of Polyurethane: SciencedirectDocument5 pagesInternal Partial Discharge in Cavity of Polyurethane: SciencedirectRavi KankaleNo ratings yet
- G H Raisoni Institute of Engineering & Technology: Instruction For Set Up Password To Word FileDocument3 pagesG H Raisoni Institute of Engineering & Technology: Instruction For Set Up Password To Word FileRavi KankaleNo ratings yet
- Simultaneous Measurement of Partial Discharge Using TEV, IEC60270 and UHF TechniquesDocument5 pagesSimultaneous Measurement of Partial Discharge Using TEV, IEC60270 and UHF TechniquesRavi KankaleNo ratings yet
- Option FormDocument2 pagesOption FormRavi KankaleNo ratings yet
- Design of Fast Charging Technique For Electrical Vehicle Charging Stations With Grid-Tied Cascaded H-Bridge Multilevel ConvertersDocument8 pagesDesign of Fast Charging Technique For Electrical Vehicle Charging Stations With Grid-Tied Cascaded H-Bridge Multilevel ConvertersRavi KankaleNo ratings yet
- Degradation of Solid Dielectrics Due To Internal Partial Discharge: Some Thoughts On Progress Made and Where To Go NowDocument10 pagesDegradation of Solid Dielectrics Due To Internal Partial Discharge: Some Thoughts On Progress Made and Where To Go NowRavi KankaleNo ratings yet
- Assignment: Part I: Ans: Roll No Marks GradesDocument4 pagesAssignment: Part I: Ans: Roll No Marks GradesRavi KankaleNo ratings yet
- Rubrics# R1 Phase I (PPM1) Max Marks (50) : Parameters Marks Allocated High Medium LowDocument1 pageRubrics# R1 Phase I (PPM1) Max Marks (50) : Parameters Marks Allocated High Medium LowRavi KankaleNo ratings yet
- Comparison of Acoustic and Electrical Partial Discharge Measurements On Cable TerminationsDocument6 pagesComparison of Acoustic and Electrical Partial Discharge Measurements On Cable TerminationsRavi KankaleNo ratings yet
- No of Students Appearing - ME-S-2020 ExamDocument2 pagesNo of Students Appearing - ME-S-2020 ExamRavi KankaleNo ratings yet
- Electronics: Improved Voltage Drop Compensation Method For Hybrid Fuel Cell Battery SystemDocument17 pagesElectronics: Improved Voltage Drop Compensation Method For Hybrid Fuel Cell Battery SystemRavi KankaleNo ratings yet
- Yhtv Gufdarn: 380/3/41/ Jronavri: Page 1 Of1Document2 pagesYhtv Gufdarn: 380/3/41/ Jronavri: Page 1 Of1Ravi KankaleNo ratings yet
- Assignment 14: Understanding Quantitative ResearchDocument3 pagesAssignment 14: Understanding Quantitative ResearchRavi Kankale100% (1)
- PPM1 ScheduleDocument1 pagePPM1 ScheduleRavi KankaleNo ratings yet
- Islanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooDocument8 pagesIslanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooRavi KankaleNo ratings yet
- Certificate: Educational Learning Centre, NagpurDocument1 pageCertificate: Educational Learning Centre, NagpurRavi KankaleNo ratings yet
- Objective:: ResumeDocument5 pagesObjective:: ResumeRavi KankaleNo ratings yet
- The Holmes-Rahe Stress Inventory: Occupational Medicine October 2017Document3 pagesThe Holmes-Rahe Stress Inventory: Occupational Medicine October 2017Ravi KankaleNo ratings yet
- Transportation Engineering - I: Introduction To Bridge EngineeringDocument33 pagesTransportation Engineering - I: Introduction To Bridge Engineeringmit rami0% (1)
- Lesson 1-SSP 113Document10 pagesLesson 1-SSP 113Jan Lester DemaalaNo ratings yet
- Exercise 1 WorkDocument9 pagesExercise 1 Workعبد الكريم المصطفىNo ratings yet
- English Literature Aspects of Female in LiteratureDocument81 pagesEnglish Literature Aspects of Female in LiteratureSazzad SohanNo ratings yet
- Introduction To Business ResearchDocument23 pagesIntroduction To Business ResearchKhalid ElGhazouliNo ratings yet
- Resume of Mohammad Efrad Hossain Job DocumentDocument5 pagesResume of Mohammad Efrad Hossain Job DocumentMohammad MonirNo ratings yet
- Ball On Plate Balancing SystemDocument27 pagesBall On Plate Balancing SystemChandan NykNo ratings yet
- Nilai Konversi Uji Kuat Tekan Variasi Bentuk Paving Block Terhadap Bentuk Sampel Uji Sni 03-0691-1996Document9 pagesNilai Konversi Uji Kuat Tekan Variasi Bentuk Paving Block Terhadap Bentuk Sampel Uji Sni 03-0691-1996MiratulHazanahNo ratings yet
- MOD2 Statement of Cash FlowsDocument2 pagesMOD2 Statement of Cash FlowsGemma DenolanNo ratings yet
- A User-Friendly Classification: The Irregular Verbs in EnglishDocument10 pagesA User-Friendly Classification: The Irregular Verbs in EnglishPabloNo ratings yet
- Floyd Edwrads Memorial Scholarship Terms of Reference 2017Document3 pagesFloyd Edwrads Memorial Scholarship Terms of Reference 2017Aswin HarishNo ratings yet
- CLPWPost War Literary WorksDocument4 pagesCLPWPost War Literary WorksRohann Ban0% (1)
- (With Script) June 2021 Saturday WSF Teaching GuideDocument3 pages(With Script) June 2021 Saturday WSF Teaching GuideMichael T. BelloNo ratings yet
- 1 s2.0 S0891422221001827 MainDocument9 pages1 s2.0 S0891422221001827 MainCarmelo VillafrancaNo ratings yet
- Riko Technical Brochure PDFDocument29 pagesRiko Technical Brochure PDFGrigoreOzonNo ratings yet
- MSDS - Prominent-GlycineDocument6 pagesMSDS - Prominent-GlycineTanawat ChinchaivanichkitNo ratings yet
- Uoc Annual Report 2018Document112 pagesUoc Annual Report 2018GitanjaliNo ratings yet
- How Can Apologetics Help Me Defend My Faith?Document16 pagesHow Can Apologetics Help Me Defend My Faith?Regina D. RogersNo ratings yet
- Atorvastatin (LIPITOR)Document2 pagesAtorvastatin (LIPITOR)Kristine Young100% (1)
- COBIT 2019 vs. COBIT 5Document6 pagesCOBIT 2019 vs. COBIT 5Baatar SukhbaatarNo ratings yet
- Purposive CommunicationDocument15 pagesPurposive CommunicationJm SalvaniaNo ratings yet
- SpencerDocument34 pagesSpencervenkatteja75No ratings yet
- Clone 123C3: Monoclonal Mouse Anti-Human CD56 Code M7304Document3 pagesClone 123C3: Monoclonal Mouse Anti-Human CD56 Code M7304Jaimier CajandabNo ratings yet
- Banking Law On Secrecy of Bank DepositsDocument29 pagesBanking Law On Secrecy of Bank DepositsbrendamanganaanNo ratings yet
- Elephant Elephants Are Large Mammals of The Family: TerminologyDocument13 pagesElephant Elephants Are Large Mammals of The Family: TerminologyMukesh ManwaniNo ratings yet
- McDonald's Vision Statement & Mission Statement Analysis - Panmore InstituteDocument3 pagesMcDonald's Vision Statement & Mission Statement Analysis - Panmore InstituteBorislav FRITZ FrancuskiNo ratings yet
- Tia HistoryDocument11 pagesTia HistoryTiara AlmeidaNo ratings yet
- Hakan Ozkan. Speaking Difficulties Among Turkish Students in Learning The English LanguageDocument2 pagesHakan Ozkan. Speaking Difficulties Among Turkish Students in Learning The English LanguagedetektifconnyNo ratings yet
- Laurie Baker: (The Brick Master of Kerala)Document8 pagesLaurie Baker: (The Brick Master of Kerala)Malik MussaNo ratings yet
- Dishonour of Cheques and Negotiable Instruments - Legalsutra - Law Students' Knowledge-Base - Law School Projects, Moot Court Memorials, Class and Case Notes and More!Document8 pagesDishonour of Cheques and Negotiable Instruments - Legalsutra - Law Students' Knowledge-Base - Law School Projects, Moot Court Memorials, Class and Case Notes and More!Himanshu Mene100% (1)

















































































































Download as pdf or txt
You might also like
- Design of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkDocument10 pagesDesign of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkKrishna ReddyNo ratings yet
- Energies 13 03784Document22 pagesEnergies 13 03784Zakaria AzizNo ratings yet
- Voltage Control in Power SystemsDocument15 pagesVoltage Control in Power SystemsAshok PalakondaNo ratings yet
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBHARADWAJ CHIVUKULANo ratings yet
- Multistage Time-Variant EV Load Modelling For Capturing EV BehaviourDocument12 pagesMultistage Time-Variant EV Load Modelling For Capturing EV BehaviourAndresNo ratings yet
- Ishaq 2016Document7 pagesIshaq 2016Bách Tạ DuyNo ratings yet
- EV Method PVDocument12 pagesEV Method PVV S R PAVAN KUMAR NEELINo ratings yet
- Loss Minimization For Distributed PV Integration Using Particle Swarm Optimization With Volt-Var ControlDocument5 pagesLoss Minimization For Distributed PV Integration Using Particle Swarm Optimization With Volt-Var ControlANJU YADAVNo ratings yet
- Behavioral Characterization of Electric Vehicle Charging Loads in A Distribution Power Grid Through Modeling of Battery ChargersDocument10 pagesBehavioral Characterization of Electric Vehicle Charging Loads in A Distribution Power Grid Through Modeling of Battery ChargersAndres Arias LondoñoNo ratings yet
- A 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargeDocument16 pagesA 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargePRAMOD PATIDARNo ratings yet
- 1 s2.0 S0360544217317887 MainDocument14 pages1 s2.0 S0360544217317887 MainChrisHang DuNo ratings yet
- Analysis of Power Factor Correction of PV-Grid Interconnected System PDFDocument6 pagesAnalysis of Power Factor Correction of PV-Grid Interconnected System PDFRabindra SinghNo ratings yet
- IEEE 2014 - Impacts of Electric Vehicles On The Transient Voltage Stability of Distribution Network and The Study of Improvement MeasuresDocument6 pagesIEEE 2014 - Impacts of Electric Vehicles On The Transient Voltage Stability of Distribution Network and The Study of Improvement MeasuresCarlos VidalesNo ratings yet
- Development of Dynamic EV Load Model For Power System Oscillatory Stability StudiesDocument6 pagesDevelopment of Dynamic EV Load Model For Power System Oscillatory Stability StudiesTareq AzizNo ratings yet
- Energies: Voltage Control Strategy For Energy Storage System in Sustainable Distribution System OperationDocument12 pagesEnergies: Voltage Control Strategy For Energy Storage System in Sustainable Distribution System OperationKanna1927No ratings yet
- 3 A Systematic PVQV Curves WaleedDocument6 pages3 A Systematic PVQV Curves Waleedwalid khanNo ratings yet
- Analysis of Distributed Generation OperaDocument10 pagesAnalysis of Distributed Generation OperaNasiru BelloNo ratings yet
- Distribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsDocument11 pagesDistribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsEvellyne ChrisNo ratings yet
- Modeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive BuildingDocument21 pagesModeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive Buildingsurisetti amruthaNo ratings yet
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDocument8 pagesSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerNo ratings yet
- MT - MFT 202101 0015Document9 pagesMT - MFT 202101 0015Ardhito PrimatamaNo ratings yet
- A Bio-Inspired Optimizer Based Ann Controller For Ev Charging Station With Grid Tied PV SystemDocument17 pagesA Bio-Inspired Optimizer Based Ann Controller For Ev Charging Station With Grid Tied PV SystemViswanathanBalajiNo ratings yet
- Capacity Determination of A Battery Energy Storage System Based On The Control Performance of Load Leveling and Voltage ControlDocument9 pagesCapacity Determination of A Battery Energy Storage System Based On The Control Performance of Load Leveling and Voltage ControlxNo ratings yet
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBrightworld ProjectsNo ratings yet
- Short-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemDocument9 pagesShort-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemEric GalvánNo ratings yet
- Optimal Ev Charging Control Strategy Based On DC Microgrid: SciencedirectDocument5 pagesOptimal Ev Charging Control Strategy Based On DC Microgrid: SciencedirectIsrael JosueNo ratings yet
- Fin Irjmets1651552661Document20 pagesFin Irjmets1651552661Jonathan ManzakiNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument11 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationAra AkramNo ratings yet
- Voltage Stability Analysis: Simulation Versus Dynamic SimulationDocument6 pagesVoltage Stability Analysis: Simulation Versus Dynamic Simulationsreekantha2013No ratings yet
- Application of Small-Sized SMES in An EV Charging Station With DC Bus and PV SystemDocument6 pagesApplication of Small-Sized SMES in An EV Charging Station With DC Bus and PV SystemBALASUNDAR CNo ratings yet
- Design of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkDocument10 pagesDesign of Off Board Electric Vehicle Charger Using PV Array Through Matlab-SimulinkKrishna ReddyNo ratings yet
- A Dynamic Operational Scheme For ResidentialDocument10 pagesA Dynamic Operational Scheme For Residentialmalekpour_ahmadNo ratings yet
- Comparative Aspects of Single & Multiple PV Arrays Connected With UPQCDocument8 pagesComparative Aspects of Single & Multiple PV Arrays Connected With UPQCInternational Journal of computational Engineering research (IJCER)No ratings yet
- Active Distribution Management System Based On Smart Inverter Control of PV ESS Integrated SystemDocument10 pagesActive Distribution Management System Based On Smart Inverter Control of PV ESS Integrated SystemChawanakorn WoraphanNo ratings yet
- Local Voltage-Stability Index Using Tellegen's Theorem: Cite This PaperDocument10 pagesLocal Voltage-Stability Index Using Tellegen's Theorem: Cite This PaperAhmedNo ratings yet
- Incorporation of A New Wind Turbine Generating System Model Into Distribution Systems Load Flow AnalysisDocument16 pagesIncorporation of A New Wind Turbine Generating System Model Into Distribution Systems Load Flow AnalysisBahtiyarDursunNo ratings yet
- 1.a Survey of Influence of Electrics Vehicle Charging On Power GridDocument5 pages1.a Survey of Influence of Electrics Vehicle Charging On Power GridpengNo ratings yet
- Utilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulDocument13 pagesUtilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulPrince Janesh UniqueNo ratings yet
- Impact of Dynamic Phevs Load On Renewable Sources Based Distribution SystemDocument6 pagesImpact of Dynamic Phevs Load On Renewable Sources Based Distribution SystemTareq AzizNo ratings yet
- Loadability EnhancementDocument1 pageLoadability Enhancementsunil8080No ratings yet
- Ashabani 3Document15 pagesAshabani 3happyworryNo ratings yet
- 1 s2.0 S2090447922003719 MainDocument16 pages1 s2.0 S2090447922003719 Maintuangsiong ShuNo ratings yet
- Grid Connected Electric Vehicle Charging Station Using PV SourceDocument4 pagesGrid Connected Electric Vehicle Charging Station Using PV Sourcesurya kNo ratings yet
- Red DEv and Tripathi Journal PaperDocument10 pagesRed DEv and Tripathi Journal PaperMichael Zontche BernardNo ratings yet
- Control of Energy Storage Interface With Abidirectional Converter For Photovoltaic SystemsDocument6 pagesControl of Energy Storage Interface With Abidirectional Converter For Photovoltaic SystemsLanstein Joe E PNo ratings yet
- +design and Implementation of A Low CostDocument9 pages+design and Implementation of A Low CostmabhatNo ratings yet
- Verma 2018Document6 pagesVerma 2018Avidip DeyNo ratings yet
- Reactive Power Sharing in Ship Energy Systems With Shaft GeneratorsDocument18 pagesReactive Power Sharing in Ship Energy Systems With Shaft GeneratorsFares MalakNo ratings yet
- Cjee 2023 0020Document12 pagesCjee 2023 0020Dr O H GuptaNo ratings yet
- Applied SciencesDocument17 pagesApplied Sciencesvkr tsNo ratings yet
- 15 3 1Document13 pages15 3 1Amruth RajuNo ratings yet
- Weakest Location Exploration in IEEE-14 Bus SystemDocument8 pagesWeakest Location Exploration in IEEE-14 Bus SystemPaul WanjoliNo ratings yet
- Noorulameen 2018Document5 pagesNoorulameen 2018t64008No ratings yet
- Modeling Harmonic Impacts of Electric Vehicle Chargers On DistribDocument9 pagesModeling Harmonic Impacts of Electric Vehicle Chargers On DistribLight SpeedNo ratings yet
- Research ArticleDocument22 pagesResearch Articleoctober87No ratings yet
- A Joint Control With Variable ZVS Angles For Dynamic Efficiency Optimization in Wireless Power Transfer SystemDocument18 pagesA Joint Control With Variable ZVS Angles For Dynamic Efficiency Optimization in Wireless Power Transfer SystemMd Aurongjeb PoltowNo ratings yet
- Equipment Loading and Voltage Unbalance in The Distribution Network With Distributed PvsDocument6 pagesEquipment Loading and Voltage Unbalance in The Distribution Network With Distributed PvsJuanJesúsPorrasGonzálezNo ratings yet
- ICCET-2021 Paper 17Document16 pagesICCET-2021 Paper 17Ravi KankaleNo ratings yet
- Emerging Trends in Distributed GeneratioDocument189 pagesEmerging Trends in Distributed GeneratioRavi KankaleNo ratings yet
- G H Raisoni Institute of Engineering & Technology: Instructions To Paper Setter/ModeratorDocument3 pagesG H Raisoni Institute of Engineering & Technology: Instructions To Paper Setter/ModeratorRavi KankaleNo ratings yet
- Invoice Tax Invoice: Zoom W-9Document2 pagesInvoice Tax Invoice: Zoom W-9Ravi KankaleNo ratings yet
- Syllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentDocument5 pagesSyllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentRavi KankaleNo ratings yet
- Remuneration FormDocument1 pageRemuneration FormRavi KankaleNo ratings yet
- Power Quality Event Generation in MATLAB/Simulink EnvironmentDocument5 pagesPower Quality Event Generation in MATLAB/Simulink EnvironmentRavi KankaleNo ratings yet
- Internal Partial Discharge in Cavity of Polyurethane: SciencedirectDocument5 pagesInternal Partial Discharge in Cavity of Polyurethane: SciencedirectRavi KankaleNo ratings yet
- G H Raisoni Institute of Engineering & Technology: Instruction For Set Up Password To Word FileDocument3 pagesG H Raisoni Institute of Engineering & Technology: Instruction For Set Up Password To Word FileRavi KankaleNo ratings yet
- Simultaneous Measurement of Partial Discharge Using TEV, IEC60270 and UHF TechniquesDocument5 pagesSimultaneous Measurement of Partial Discharge Using TEV, IEC60270 and UHF TechniquesRavi KankaleNo ratings yet
- Option FormDocument2 pagesOption FormRavi KankaleNo ratings yet
- Design of Fast Charging Technique For Electrical Vehicle Charging Stations With Grid-Tied Cascaded H-Bridge Multilevel ConvertersDocument8 pagesDesign of Fast Charging Technique For Electrical Vehicle Charging Stations With Grid-Tied Cascaded H-Bridge Multilevel ConvertersRavi KankaleNo ratings yet
- Degradation of Solid Dielectrics Due To Internal Partial Discharge: Some Thoughts On Progress Made and Where To Go NowDocument10 pagesDegradation of Solid Dielectrics Due To Internal Partial Discharge: Some Thoughts On Progress Made and Where To Go NowRavi KankaleNo ratings yet
- Assignment: Part I: Ans: Roll No Marks GradesDocument4 pagesAssignment: Part I: Ans: Roll No Marks GradesRavi KankaleNo ratings yet
- Rubrics# R1 Phase I (PPM1) Max Marks (50) : Parameters Marks Allocated High Medium LowDocument1 pageRubrics# R1 Phase I (PPM1) Max Marks (50) : Parameters Marks Allocated High Medium LowRavi KankaleNo ratings yet
- Comparison of Acoustic and Electrical Partial Discharge Measurements On Cable TerminationsDocument6 pagesComparison of Acoustic and Electrical Partial Discharge Measurements On Cable TerminationsRavi KankaleNo ratings yet
- No of Students Appearing - ME-S-2020 ExamDocument2 pagesNo of Students Appearing - ME-S-2020 ExamRavi KankaleNo ratings yet
- Electronics: Improved Voltage Drop Compensation Method For Hybrid Fuel Cell Battery SystemDocument17 pagesElectronics: Improved Voltage Drop Compensation Method For Hybrid Fuel Cell Battery SystemRavi KankaleNo ratings yet
- Yhtv Gufdarn: 380/3/41/ Jronavri: Page 1 Of1Document2 pagesYhtv Gufdarn: 380/3/41/ Jronavri: Page 1 Of1Ravi KankaleNo ratings yet
- Assignment 14: Understanding Quantitative ResearchDocument3 pagesAssignment 14: Understanding Quantitative ResearchRavi Kankale100% (1)
- PPM1 ScheduleDocument1 pagePPM1 ScheduleRavi KankaleNo ratings yet
- Islanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooDocument8 pagesIslanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooRavi KankaleNo ratings yet
- Certificate: Educational Learning Centre, NagpurDocument1 pageCertificate: Educational Learning Centre, NagpurRavi KankaleNo ratings yet
- Objective:: ResumeDocument5 pagesObjective:: ResumeRavi KankaleNo ratings yet
- The Holmes-Rahe Stress Inventory: Occupational Medicine October 2017Document3 pagesThe Holmes-Rahe Stress Inventory: Occupational Medicine October 2017Ravi KankaleNo ratings yet
- Transportation Engineering - I: Introduction To Bridge EngineeringDocument33 pagesTransportation Engineering - I: Introduction To Bridge Engineeringmit rami0% (1)
- Lesson 1-SSP 113Document10 pagesLesson 1-SSP 113Jan Lester DemaalaNo ratings yet
- Exercise 1 WorkDocument9 pagesExercise 1 Workعبد الكريم المصطفىNo ratings yet
- English Literature Aspects of Female in LiteratureDocument81 pagesEnglish Literature Aspects of Female in LiteratureSazzad SohanNo ratings yet
- Introduction To Business ResearchDocument23 pagesIntroduction To Business ResearchKhalid ElGhazouliNo ratings yet
- Resume of Mohammad Efrad Hossain Job DocumentDocument5 pagesResume of Mohammad Efrad Hossain Job DocumentMohammad MonirNo ratings yet
- Ball On Plate Balancing SystemDocument27 pagesBall On Plate Balancing SystemChandan NykNo ratings yet
- Nilai Konversi Uji Kuat Tekan Variasi Bentuk Paving Block Terhadap Bentuk Sampel Uji Sni 03-0691-1996Document9 pagesNilai Konversi Uji Kuat Tekan Variasi Bentuk Paving Block Terhadap Bentuk Sampel Uji Sni 03-0691-1996MiratulHazanahNo ratings yet
- MOD2 Statement of Cash FlowsDocument2 pagesMOD2 Statement of Cash FlowsGemma DenolanNo ratings yet
- A User-Friendly Classification: The Irregular Verbs in EnglishDocument10 pagesA User-Friendly Classification: The Irregular Verbs in EnglishPabloNo ratings yet
- Floyd Edwrads Memorial Scholarship Terms of Reference 2017Document3 pagesFloyd Edwrads Memorial Scholarship Terms of Reference 2017Aswin HarishNo ratings yet
- CLPWPost War Literary WorksDocument4 pagesCLPWPost War Literary WorksRohann Ban0% (1)
- (With Script) June 2021 Saturday WSF Teaching GuideDocument3 pages(With Script) June 2021 Saturday WSF Teaching GuideMichael T. BelloNo ratings yet
- 1 s2.0 S0891422221001827 MainDocument9 pages1 s2.0 S0891422221001827 MainCarmelo VillafrancaNo ratings yet
- Riko Technical Brochure PDFDocument29 pagesRiko Technical Brochure PDFGrigoreOzonNo ratings yet
- MSDS - Prominent-GlycineDocument6 pagesMSDS - Prominent-GlycineTanawat ChinchaivanichkitNo ratings yet
- Uoc Annual Report 2018Document112 pagesUoc Annual Report 2018GitanjaliNo ratings yet
- How Can Apologetics Help Me Defend My Faith?Document16 pagesHow Can Apologetics Help Me Defend My Faith?Regina D. RogersNo ratings yet
- Atorvastatin (LIPITOR)Document2 pagesAtorvastatin (LIPITOR)Kristine Young100% (1)
- COBIT 2019 vs. COBIT 5Document6 pagesCOBIT 2019 vs. COBIT 5Baatar SukhbaatarNo ratings yet
- Purposive CommunicationDocument15 pagesPurposive CommunicationJm SalvaniaNo ratings yet
- SpencerDocument34 pagesSpencervenkatteja75No ratings yet
- Clone 123C3: Monoclonal Mouse Anti-Human CD56 Code M7304Document3 pagesClone 123C3: Monoclonal Mouse Anti-Human CD56 Code M7304Jaimier CajandabNo ratings yet
- Banking Law On Secrecy of Bank DepositsDocument29 pagesBanking Law On Secrecy of Bank DepositsbrendamanganaanNo ratings yet
- Elephant Elephants Are Large Mammals of The Family: TerminologyDocument13 pagesElephant Elephants Are Large Mammals of The Family: TerminologyMukesh ManwaniNo ratings yet
- McDonald's Vision Statement & Mission Statement Analysis - Panmore InstituteDocument3 pagesMcDonald's Vision Statement & Mission Statement Analysis - Panmore InstituteBorislav FRITZ FrancuskiNo ratings yet
- Tia HistoryDocument11 pagesTia HistoryTiara AlmeidaNo ratings yet
- Hakan Ozkan. Speaking Difficulties Among Turkish Students in Learning The English LanguageDocument2 pagesHakan Ozkan. Speaking Difficulties Among Turkish Students in Learning The English LanguagedetektifconnyNo ratings yet
- Laurie Baker: (The Brick Master of Kerala)Document8 pagesLaurie Baker: (The Brick Master of Kerala)Malik MussaNo ratings yet
- Dishonour of Cheques and Negotiable Instruments - Legalsutra - Law Students' Knowledge-Base - Law School Projects, Moot Court Memorials, Class and Case Notes and More!Document8 pagesDishonour of Cheques and Negotiable Instruments - Legalsutra - Law Students' Knowledge-Base - Law School Projects, Moot Court Memorials, Class and Case Notes and More!Himanshu Mene100% (1)