Download as pdf or txt
You might also like
- Robot Programming: A Practical Guide to Behavior-Based RoboticsFrom EverandRobot Programming: A Practical Guide to Behavior-Based RoboticsRating: 4.5 out of 5 stars4.5/5 (1)
- Where Would The Reflection Surface Lie?: Exercise 5c: A Simple SynclineDocument6 pagesWhere Would The Reflection Surface Lie?: Exercise 5c: A Simple SynclineFachri ZainuddinNo ratings yet
- Action Plan in Reading: Program Activity Objectives Timeline Person'S Involve Success IndicatorDocument2 pagesAction Plan in Reading: Program Activity Objectives Timeline Person'S Involve Success IndicatorMelieza Melody Ampan80% (10)
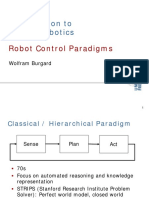
- Introduction To Mobile Robotics: Robot Control ParadigmsDocument21 pagesIntroduction To Mobile Robotics: Robot Control Paradigmssaesaria17No ratings yet
- Robotic ParadigmsDocument22 pagesRobotic ParadigmsBibekananda DattaNo ratings yet
- Subsumption and Genghis: CPSC 472/572 - Intelligent Robotics Brian ScassellatiDocument39 pagesSubsumption and Genghis: CPSC 472/572 - Intelligent Robotics Brian ScassellatiPranav WolfeschlegelsteinbergerdorfNo ratings yet
- 2 LocalizationDocument49 pages2 Localizationalex jamesNo ratings yet
- Autonomous Robots: (Many Following Robot Slides Courtesy Steffen Gutmann, SONY Labs)Document26 pagesAutonomous Robots: (Many Following Robot Slides Courtesy Steffen Gutmann, SONY Labs)Sourabh GuglaniNo ratings yet
- AR2022 Lec 2-2Document23 pagesAR2022 Lec 2-2H KNo ratings yet
- Mobile RobotsDocument58 pagesMobile Robotssaikatcu2000No ratings yet
- Lecture 1 Production System Compatibility ModeDocument14 pagesLecture 1 Production System Compatibility ModeSanjeev KumarNo ratings yet
- Introduction To Robotics: Talk The TalkDocument49 pagesIntroduction To Robotics: Talk The TalkManar HosnyNo ratings yet
- Nov 1 Localization IDocument58 pagesNov 1 Localization IJeevika D.kNo ratings yet
- EC7010: Autonomous Mobile Robots and Robot IntelligenceDocument44 pagesEC7010: Autonomous Mobile Robots and Robot Intelligencebooks sanNo ratings yet
- 2 Locomotion Concepts Add Ons 2021Document36 pages2 Locomotion Concepts Add Ons 2021eider castellarNo ratings yet
- Lec6 MobileRobotControlDocument5 pagesLec6 MobileRobotControlIsuru Pasan DasanayakeNo ratings yet
- Chapter 1introductionDocument42 pagesChapter 1introductionStephen SalNo ratings yet
- Control For Mobile RobotDocument71 pagesControl For Mobile Robotfikry mulyadiNo ratings yet
- 2019 Lecture1 - IntroDocument33 pages2019 Lecture1 - IntroChailenderNo ratings yet
- Introduction To Artificial IntelligenceDocument44 pagesIntroduction To Artificial Intelligencemerajul islamNo ratings yet
- EGN 3060c: Introduction To Robotics: Background To Planning Planning As SearchDocument47 pagesEGN 3060c: Introduction To Robotics: Background To Planning Planning As SearchManny HdezNo ratings yet
- AR2022 Lec 1-FinalDocument25 pagesAR2022 Lec 1-FinalH KNo ratings yet
- Lecture 1 Introduction No VideoDocument63 pagesLecture 1 Introduction No Videojack2423No ratings yet
- Lecture 1 Introduction No Video Part1Document18 pagesLecture 1 Introduction No Video Part1jack2423No ratings yet
- Smart WheelchairDocument27 pagesSmart WheelchairAYUSH JAINNo ratings yet
- 9 - SensorModelsAndMappingDocument117 pages9 - SensorModelsAndMappingshitalchiddarwarNo ratings yet
- František Brabec A Robotika Na NASA Space Robotics ChallengeDocument24 pagesFrantišek Brabec A Robotika Na NASA Space Robotics ChallengeTajne JmenoNo ratings yet
- LectureOne Introduction To Robotics DrWasanDocument31 pagesLectureOne Introduction To Robotics DrWasanwasan.engNo ratings yet
- CH - 1 - Introduction To RoboticsDocument46 pagesCH - 1 - Introduction To RoboticsChristy PollyNo ratings yet
- Design and Implementation of Autonomous Lawn-Mower Robot ControllerDocument5 pagesDesign and Implementation of Autonomous Lawn-Mower Robot ControllerJithin JohnsonNo ratings yet
- Artificial Intelligence For ASIMODocument6 pagesArtificial Intelligence For ASIMOMeri GavrilovskaNo ratings yet
- Unit V Rehabilitation Robotics: Arm and Body WristDocument10 pagesUnit V Rehabilitation Robotics: Arm and Body Wristẞtåy ÂwäyNo ratings yet
- An Approach To Navigation For The HumanoDocument12 pagesAn Approach To Navigation For The HumanoAreej Abdul HaiNo ratings yet
- Collision Detection and Robot Reaction: Robotics 2Document49 pagesCollision Detection and Robot Reaction: Robotics 2matadorisheNo ratings yet
- Legacy Imagemagick Org Usage Distorts HorizonDocument97 pagesLegacy Imagemagick Org Usage Distorts Horizonwds657No ratings yet
- Ai Lect1 IntroductionDocument60 pagesAi Lect1 IntroductionMenna SaedNo ratings yet
- Implementation of VFHDocument6 pagesImplementation of VFHqwerty uNo ratings yet
- Fast and Parallel Algorithms For Multiple-Scattering ImagingDocument43 pagesFast and Parallel Algorithms For Multiple-Scattering ImagingAnasya BabySpaNo ratings yet
- Biologically Moivated Computer VisionDocument29 pagesBiologically Moivated Computer Visionkarthik singaraoNo ratings yet
- Artificial Intelligence and RoboticsDocument36 pagesArtificial Intelligence and Roboticssathishkumar PeriyasamyNo ratings yet
- Large-Scale Modular Robots: Polybot, Atron, Tens of Modules Claytronics Thousands of ModulesDocument22 pagesLarge-Scale Modular Robots: Polybot, Atron, Tens of Modules Claytronics Thousands of ModulesSubramanyam NareshNo ratings yet
- Introduction To Artificial Intelligence: End Term AssignmentDocument33 pagesIntroduction To Artificial Intelligence: End Term AssignmentSrijon MalikNo ratings yet
- PLMCC, Jssate-Step, Noida 0 of 7Document6 pagesPLMCC, Jssate-Step, Noida 0 of 7Đình Tước VũNo ratings yet
- Pratyusha FEM Assignment LatexDocument3 pagesPratyusha FEM Assignment LatexDoredla Nagaraju 19PHD0534No ratings yet
- Artificial Intelligence and Robotics: Todd Bryant Sareen Engineer Han HuDocument36 pagesArtificial Intelligence and Robotics: Todd Bryant Sareen Engineer Han HuprabakaranNo ratings yet
- CH 5 FiguresDocument11 pagesCH 5 FiguresamroushararaNo ratings yet
- Comparison of Navigation Methods For Autonomous Personal Assistant RobotsDocument4 pagesComparison of Navigation Methods For Autonomous Personal Assistant RobotsChandru .MNo ratings yet
- Coordination of Multiple Mobile Robots in An Object Carrying Task Using Implicit CommunicationDocument6 pagesCoordination of Multiple Mobile Robots in An Object Carrying Task Using Implicit CommunicationRaúl CortésNo ratings yet
- C2 - Forward Kinematics of Robot 1 For AMP - To StudDocument36 pagesC2 - Forward Kinematics of Robot 1 For AMP - To StudNguyen Duc TruongNo ratings yet
- Black Box ms8Document2 pagesBlack Box ms8api-557294321No ratings yet
- Muhammet Yanik - tinyML Asia 2023Document18 pagesMuhammet Yanik - tinyML Asia 2023sacha.krstulovicNo ratings yet
- Where Am I?: Andy FloresDocument3 pagesWhere Am I?: Andy FloresAndy FloresNo ratings yet
- CAM Notes Chapter 6Document2 pagesCAM Notes Chapter 6jay kalavadiyaNo ratings yet
- Ai Lect1 IntroductionDocument60 pagesAi Lect1 IntroductionMenna SaedNo ratings yet
- Introduction To Artificial IntelligenceDocument41 pagesIntroduction To Artificial IntelligencekalaNo ratings yet
- INFO AI Ch4Document90 pagesINFO AI Ch4rojen003No ratings yet
- Humanoid Robots in Defence and Rescue Operations: AbstractDocument5 pagesHumanoid Robots in Defence and Rescue Operations: AbstractDipu VNo ratings yet
- B.M.S. Institute of Technology and Management: Line Follower RobotDocument1 pageB.M.S. Institute of Technology and Management: Line Follower RobotRitik Raj SrivastavaNo ratings yet
- Robot Components:: Robotics 1Document27 pagesRobot Components:: Robotics 1Aland BravoNo ratings yet
- Industrial Robotics: Dr. M V A Raju BahubalendruniDocument24 pagesIndustrial Robotics: Dr. M V A Raju Bahubalendruniabdul rahmanNo ratings yet
- b859 PDFDocument12 pagesb859 PDFYousif HagopainNo ratings yet
- Intelligent Robotics: Questions?Document15 pagesIntelligent Robotics: Questions?Ahmad RamadhaniNo ratings yet
- Introduction To Mobile Robotics: Probabilistic Motion ModelsDocument43 pagesIntroduction To Mobile Robotics: Probabilistic Motion ModelsAhmad RamadhaniNo ratings yet
- Introduction To Mobile Robotics: Proximity SensorsDocument13 pagesIntroduction To Mobile Robotics: Proximity SensorsAhmad RamadhaniNo ratings yet
- Introduction To Mobile RoboticsDocument36 pagesIntroduction To Mobile RoboticsAhmad RamadhaniNo ratings yet
- Motivation - Wikipedia, The Free EncyclopediaDocument14 pagesMotivation - Wikipedia, The Free EncyclopediaMarvin MarquezNo ratings yet
- Activity 2Document3 pagesActivity 2Yayang Nasrudin100% (1)
- Philippine Politics and Governance DLPDocument4 pagesPhilippine Politics and Governance DLPJoel PaunilNo ratings yet
- Competency Based InterviewsDocument3 pagesCompetency Based InterviewsSajNo ratings yet
- Foundations and Group Behavior: Twelfth EditionDocument21 pagesFoundations and Group Behavior: Twelfth Editionrahul raoNo ratings yet
- Von Bertalanffy Presentation TFNDocument19 pagesVon Bertalanffy Presentation TFNWinter SonataNo ratings yet
- Job Analysis Assignment Translating Strategy Into HR Policies and Practices CaseDocument1 pageJob Analysis Assignment Translating Strategy Into HR Policies and Practices Casezoha nabeelNo ratings yet
- Theories of Language AcquisitionDocument3 pagesTheories of Language AcquisitionThe Grizzled VetNo ratings yet
- The Language Instinct by Steven Pinker SummaryDocument2 pagesThe Language Instinct by Steven Pinker SummaryTazeen Anwar100% (1)
- Sow English Year 2 2022Document13 pagesSow English Year 2 2022Figo FongNo ratings yet
- Grade 6 Reading RubricDocument4 pagesGrade 6 Reading Rubricanurag_kapila3901No ratings yet
- Life Span DevelopmentDocument5 pagesLife Span Developmentawais100% (1)
- HRM - Performance AppraisalDocument33 pagesHRM - Performance AppraisalMahil BuvanNo ratings yet
- Purposive Communication Part 1 PDFDocument14 pagesPurposive Communication Part 1 PDFThrisia Belo100% (1)
- Extrinsic Motivation PDFDocument2 pagesExtrinsic Motivation PDFDanielleNo ratings yet
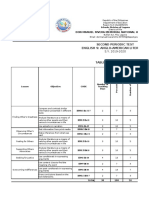
- Second Periodic Test English 9: Anglo-American Literature: Don Manuel Rivera Memorial National High SchoolDocument4 pagesSecond Periodic Test English 9: Anglo-American Literature: Don Manuel Rivera Memorial National High SchoolMariel Avilla Mercado-CortezNo ratings yet
- Curriculum DevelopmentDocument43 pagesCurriculum DevelopmentGerardSu100% (2)
- Literary Analysis Essay RUBRICDocument2 pagesLiterary Analysis Essay RUBRICHarvey YangNo ratings yet
- Narenda Rianto - Od HRDocument3 pagesNarenda Rianto - Od HRgematNo ratings yet
- 2 Examples - Alignment of Calendar System To WMELS & IEP GoalsDocument3 pages2 Examples - Alignment of Calendar System To WMELS & IEP GoalsSuperfixenNo ratings yet
- Kevin Lynch PrinciplesDocument11 pagesKevin Lynch PrinciplesL.A.HARIPRASATHNo ratings yet
- Brown and Beige Simple English Reading and Writing Types of Discourse Presentation 1Document33 pagesBrown and Beige Simple English Reading and Writing Types of Discourse Presentation 1Jemma Rose TegioNo ratings yet
- Extensive ReadingDocument8 pagesExtensive ReadingBoke PachaNo ratings yet
- A Summary of A Line Graph: Before ReadingDocument5 pagesA Summary of A Line Graph: Before Readingوديع القباطيNo ratings yet
- Constructivism EssayDocument9 pagesConstructivism Essayjose roque farfanNo ratings yet
- Teaching Mixed Ability ClassesDocument32 pagesTeaching Mixed Ability ClassesNur Zaida100% (1)
- GSD1x 1 Kant 1 1 Aesthetic Perception Rc1-EnDocument2 pagesGSD1x 1 Kant 1 1 Aesthetic Perception Rc1-EnNatnael BahruNo ratings yet
- BS (English) Dept of English University of SargodhaDocument36 pagesBS (English) Dept of English University of SargodhaFEROZ KHANNo ratings yet
- Cerme1 Proceedings 1 v2 v1 0Document169 pagesCerme1 Proceedings 1 v2 v1 0Rehan RameezNo ratings yet