Download as pdf or txt
You might also like
- Aution Eleven АЕ-4020 SM PDFDocument272 pagesAution Eleven АЕ-4020 SM PDFНиколайКрыловNo ratings yet
- Viscosity by Efflux TimeDocument3 pagesViscosity by Efflux TimeAmit Jharbade67% (3)
- Wavelet-Galerkin Solution of Some Ordinary Differential EquationsDocument6 pagesWavelet-Galerkin Solution of Some Ordinary Differential EquationsVikram ChoudharyNo ratings yet
- Helm (2008) : Section 32.4: Parabolic PdesDocument24 pagesHelm (2008) : Section 32.4: Parabolic Pdestarek mahmoudNo ratings yet
- MIT2 29S15 Lecture10Document26 pagesMIT2 29S15 Lecture10Ihab OmarNo ratings yet
- An Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationsDocument25 pagesAn Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationstuljabhavanikfpcNo ratings yet
- ECE330 Fall 16 Lecture4 PDFDocument10 pagesECE330 Fall 16 Lecture4 PDFPhùng Đức AnhNo ratings yet
- 30 Partial Differential Equations 02-11-2022Document49 pages30 Partial Differential Equations 02-11-2022Omkar DakeNo ratings yet
- Examples4 PDFDocument2 pagesExamples4 PDFManuel OosNo ratings yet
- Neural Ordinary Differential EquationsDocument13 pagesNeural Ordinary Differential Equationsjeff chenNo ratings yet
- Nonlinear Pendulum A Simple Generalization 1007.4026 - 2Document10 pagesNonlinear Pendulum A Simple Generalization 1007.4026 - 2عقبة عقبةNo ratings yet
- Local and Global Well-Posedness For The Critical Schrödinger-Debye System, Adán J. Corcho, Filipe Oliveira and Jorge Drumond SilvaDocument15 pagesLocal and Global Well-Posedness For The Critical Schrödinger-Debye System, Adán J. Corcho, Filipe Oliveira and Jorge Drumond SilvaFis MatNo ratings yet
- Ordinary and Partial Differential Equations and ApplicationsDocument16 pagesOrdinary and Partial Differential Equations and ApplicationsBarrack YomamaNo ratings yet
- Introduction To Chaos: The Damped, Driven, Nonlinear PendulumDocument14 pagesIntroduction To Chaos: The Damped, Driven, Nonlinear PendulumKikkuNo ratings yet
- Introduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Document7 pagesIntroduction To The Painlevé Property, Test and Analysis1 (R Conte & M Mussette)Jason UchennnaNo ratings yet
- Modelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsDocument14 pagesModelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsGustavo LimaNo ratings yet
- Numerical Methods For Coupled Systems (CPLED) : February 9, 2016Document5 pagesNumerical Methods For Coupled Systems (CPLED) : February 9, 2016gauravbmcNo ratings yet
- Analytical Solution of Mathieu EquationDocument6 pagesAnalytical Solution of Mathieu EquationরাকিবNo ratings yet
- DAEsDocument40 pagesDAEsfaizabbk1709No ratings yet
- Classical MechanicsDocument6 pagesClassical MechanicsSebastian Soto PerdomoNo ratings yet
- CH 3Document10 pagesCH 3Ashvanee GargNo ratings yet
- On The State-Space Modeling of Fractional SystemsDocument6 pagesOn The State-Space Modeling of Fractional SystemsVignesh RamakrishnanNo ratings yet
- Klein-Gordon EquationsDocument7 pagesKlein-Gordon EquationsCecilia DécigaNo ratings yet
- Null Controllability of The 1D Heat Equation Using FlatnessDocument6 pagesNull Controllability of The 1D Heat Equation Using Flatnessعبدالله قيس محمود الحيدريNo ratings yet
- On Anharmonic Stabilisation Equations For Black HoDocument8 pagesOn Anharmonic Stabilisation Equations For Black HoadrianordonezsanmartinNo ratings yet
- Appendix PdeDocument25 pagesAppendix Pdeعلي محمدNo ratings yet
- Applications of Fractional Differential Equations: Applied Mathematical Sciences, Vol. 4, 2010, No. 50, 2453 - 2461Document9 pagesApplications of Fractional Differential Equations: Applied Mathematical Sciences, Vol. 4, 2010, No. 50, 2453 - 2461TeferiNo ratings yet
- Initial-Value Problems For Ordinary Differential EquationsDocument8 pagesInitial-Value Problems For Ordinary Differential Equations23 33No ratings yet
- Preconditioned Dynamic Iteration For Coupled Differential-Algebraic SystemsDocument25 pagesPreconditioned Dynamic Iteration For Coupled Differential-Algebraic SystemsJese MadridNo ratings yet
- Mathematical and Computer Modelling: K. Maleknejad, Z. JafaribehbahaniDocument12 pagesMathematical and Computer Modelling: K. Maleknejad, Z. JafaribehbahanihungkgNo ratings yet
- A Numerical Technique For Solving Fractional Optimal Control ProblemsDocument13 pagesA Numerical Technique For Solving Fractional Optimal Control ProblemsAntonio SánchezNo ratings yet
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanNo ratings yet
- Partial Differential EquationsDocument18 pagesPartial Differential EquationsRohit Kalsi100% (1)
- C. Zalian: Nonlinear Coupled Oscillators, Blazhko Effect and SynchronisationDocument4 pagesC. Zalian: Nonlinear Coupled Oscillators, Blazhko Effect and SynchronisationLucas1283No ratings yet
- Innite Horizon Forward-Backward Stochastic Dierential EquationsDocument18 pagesInnite Horizon Forward-Backward Stochastic Dierential EquationsMartina MerolaNo ratings yet
- Lecture11 - Initial Value Problem Eulers MethodDocument17 pagesLecture11 - Initial Value Problem Eulers MethodNa2ryNo ratings yet
- Topic 4 Convolution IntegralDocument5 pagesTopic 4 Convolution IntegralRona SharmaNo ratings yet
- 1 s2.0 S0022247X24002105 MainDocument17 pages1 s2.0 S0022247X24002105 Mainmosab.backkupNo ratings yet
- On The Approximate Analytical Solution To Non-Linear Oscillation SystemsDocument11 pagesOn The Approximate Analytical Solution To Non-Linear Oscillation SystemsC V CHANDRASHEKARANo ratings yet
- A Comparison Between The Split Step Fourier and Finite-Difference MethodDocument7 pagesA Comparison Between The Split Step Fourier and Finite-Difference MethodGabriel GouveiaNo ratings yet
- Fredholm and Volterra Integral Equations of The Second Kind: William H. Press Saul A. TeukolskyDocument5 pagesFredholm and Volterra Integral Equations of The Second Kind: William H. Press Saul A. TeukolskyFizzerNo ratings yet
- Assignment 2Document5 pagesAssignment 2Aarav 127No ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- Chap9 NPT Grand Canonical Ensemble v04Document12 pagesChap9 NPT Grand Canonical Ensemble v04Paramita HaldarNo ratings yet
- Numerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeDocument9 pagesNumerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeVe LopiNo ratings yet
- MIT8 09F14 Chapter 1Document29 pagesMIT8 09F14 Chapter 1pestaNo ratings yet
- Numerical Study of Pendulums From The Simple PenduDocument8 pagesNumerical Study of Pendulums From The Simple PenduAndreea SolomonNo ratings yet
- Numerical Methods For Simulation of Stochastic Differential EquationsDocument10 pagesNumerical Methods For Simulation of Stochastic Differential EquationsJese MadridNo ratings yet
- OscillatorsDocument15 pagesOscillatorsdamilolaa_xNo ratings yet
- Final Exam SolutionsDocument9 pagesFinal Exam SolutionskudzaiNo ratings yet
- 344-Article Text-1317-2-10-20220621Document26 pages344-Article Text-1317-2-10-20220621Kayiin NanaNo ratings yet
- Light Atom Slide 2008 V 0.5Document71 pagesLight Atom Slide 2008 V 0.5lad.kocbNo ratings yet
- Implementation of The Virtual Element Method For Coupled ThermomechanicalDocument22 pagesImplementation of The Virtual Element Method For Coupled ThermomechanicalDakhlaouiNo ratings yet
- L03 TimeResponseDocument41 pagesL03 TimeResponsekazem mokhtariNo ratings yet
- 8009 58354 1 PBDocument20 pages8009 58354 1 PBNabila AkramNo ratings yet
- 1 s2.0 S0021999115006622 Main PDFDocument16 pages1 s2.0 S0021999115006622 Main PDF青山漫步No ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- 10.3934 Math.2021118Document11 pages10.3934 Math.2021118Liliana GuranNo ratings yet
- Vector Stochastic Differential Equations Used To Electrical Networks With Random ParametersDocument8 pagesVector Stochastic Differential Equations Used To Electrical Networks With Random ParametersqwertyNo ratings yet
- Free Vibration of ADocument12 pagesFree Vibration of AAlex oigara100% (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Week 1Document31 pagesWeek 1salim ucarNo ratings yet
- Sayısal Görüntü İşleme Teknikleri: Doç. Dr. Mehmet Serdar GüzelDocument10 pagesSayısal Görüntü İşleme Teknikleri: Doç. Dr. Mehmet Serdar Güzelsalim ucarNo ratings yet
- Week 2Document45 pagesWeek 2salim ucarNo ratings yet
- Isolation: The Confinement PrincipleDocument54 pagesIsolation: The Confinement Principlesalim ucarNo ratings yet
- Browser Security Model: John MitchellDocument74 pagesBrowser Security Model: John Mitchellsalim ucarNo ratings yet
- Week 3Document26 pagesWeek 3salim ucarNo ratings yet
- Secure Architecture PrinciplesDocument67 pagesSecure Architecture Principlessalim ucarNo ratings yet
- 07 CryptoDocument46 pages07 Cryptosalim ucarNo ratings yet
- Internet Security: How The Internet Works and Some Basic VulnerabilitiesDocument39 pagesInternet Security: How The Internet Works and Some Basic Vulnerabilitiessalim ucarNo ratings yet
- Web Application Security: John MitchellDocument90 pagesWeb Application Security: John Mitchellsalim ucarNo ratings yet
- Introduction To Programmable Logic Controllers - Part I: Module 2: Number Systems and Logic FunctionsDocument3 pagesIntroduction To Programmable Logic Controllers - Part I: Module 2: Number Systems and Logic Functionssalim ucarNo ratings yet
- Network Security Protocols and Defensive Mechanisms: John MitchellDocument69 pagesNetwork Security Protocols and Defensive Mechanisms: John Mitchellsalim ucarNo ratings yet
- Dokumen - Tips - Programmable Logic Controllers 2009 600 Pages James A Logic ControllersDocument20 pagesDokumen - Tips - Programmable Logic Controllers 2009 600 Pages James A Logic Controllerssalim ucarNo ratings yet
- Introduction To Programmable Logic Controllers - Part IDocument5 pagesIntroduction To Programmable Logic Controllers - Part Isalim ucarNo ratings yet
- Series 9 11 Search For Truth 10 31 2021Document77 pagesSeries 9 11 Search For Truth 10 31 2021Lance CiepielaNo ratings yet
- Dipole Radiation in The Presence of A Conducting Half-SpaceDocument405 pagesDipole Radiation in The Presence of A Conducting Half-SpaceBélaid Hocine AnisNo ratings yet
- Design of Madanpatti WeirDocument147 pagesDesign of Madanpatti Weirविवेक कुमारNo ratings yet
- 2946 1223 00 - Overhaul Inter Cooler - After CoolerDocument12 pages2946 1223 00 - Overhaul Inter Cooler - After CoolerMax JohnNo ratings yet
- Ansi+asse+z359 6-2016Document60 pagesAnsi+asse+z359 6-2016Manu Santi Guti100% (1)
- Calculation of Crack Width As Per Is:456-2000Document4 pagesCalculation of Crack Width As Per Is:456-2000Gautam DuttaNo ratings yet
- X C C C F F F: Limiting Reactant (Always)Document2 pagesX C C C F F F: Limiting Reactant (Always)Christine FabrosNo ratings yet
- Tower Footing Resistance and Lightning TDocument9 pagesTower Footing Resistance and Lightning TiaessackjeeNo ratings yet
- Notes Physics 1Document682 pagesNotes Physics 1BsbsbaNo ratings yet
- 【Haug-1984】Computer Aided Analysis and Optimization of Mechanical System Dynamics PDFDocument718 pages【Haug-1984】Computer Aided Analysis and Optimization of Mechanical System Dynamics PDFAlfoilNo ratings yet
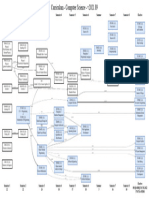
- Curriculum - Computer Science - v2021.89Document1 pageCurriculum - Computer Science - v2021.8927.Nguyễn Trung Nguyên 12a17No ratings yet
- Online Homework 8Document5 pagesOnline Homework 8Hoang PhuonghaNo ratings yet
- Grade 7 LessonDocument4 pagesGrade 7 LessonBARNUEVO HONEY MARIENo ratings yet
- Structural Analysis of Transmission Structures: 1.problem DescriptionDocument69 pagesStructural Analysis of Transmission Structures: 1.problem DescriptionMahesh ANo ratings yet
- Chemical Principles The Quest For Insight 7Th Edition Atkins Solutions Manual Full Chapter PDFDocument36 pagesChemical Principles The Quest For Insight 7Th Edition Atkins Solutions Manual Full Chapter PDFpauline.wilson221100% (15)
- Chapter 14 - GiancoliDocument4 pagesChapter 14 - GiancoliHectorCabzNo ratings yet
- 2A AM-FAME-AMIS MicroProp Functional Volpi 2023-2024Document52 pages2A AM-FAME-AMIS MicroProp Functional Volpi 2023-2024Moiz AmirNo ratings yet
- Lab 10 - Youngs Modulus - Rock Burst Liability IndexDocument7 pagesLab 10 - Youngs Modulus - Rock Burst Liability IndexankeshNo ratings yet
- Computation of The Compression Factor AnDocument23 pagesComputation of The Compression Factor AnJose Francisco Olivares QuevedoNo ratings yet
- Elected Shallow Foundation Bearing Capacity Methods: March 2016Document59 pagesElected Shallow Foundation Bearing Capacity Methods: March 2016Alejandro SerratoNo ratings yet
- Science Class 7 Mid TermDocument2 pagesScience Class 7 Mid TermbeakraamNo ratings yet
- Types of Allowance and Calculation of Allowance in A Time StudyDocument6 pagesTypes of Allowance and Calculation of Allowance in A Time StudySharmilaNo ratings yet
- Magnetism 2024Document4 pagesMagnetism 2024Immanuel BobbyNo ratings yet
- The Handbook of Computer-Aided Geometric Design: January 2002Document17 pagesThe Handbook of Computer-Aided Geometric Design: January 2002MPD19I001 VITHISHA MNo ratings yet
- Design of Irregular SlabsDocument5 pagesDesign of Irregular SlabsEngr. Md. Mahmdudul Hasan ShawonNo ratings yet
- Module 11.2 EM2Document7 pagesModule 11.2 EM2BenNo ratings yet
- Drilled Cast-In-Place Pile Design Based On ACI 318-08Document17 pagesDrilled Cast-In-Place Pile Design Based On ACI 318-08Habibur RahmanNo ratings yet
- A New Ring Shear Apparatus and Its Applicationt o The Measurement of Residual StrengthDocument58 pagesA New Ring Shear Apparatus and Its Applicationt o The Measurement of Residual StrengthCustódio MiguensNo ratings yet