
05 - SVC Tool
05 - SVC Tool
You might also like
- FS Kakanin Feasibility Study Ana Adona 2018Document112 pagesFS Kakanin Feasibility Study Ana Adona 2018Dang Bi100% (4)
- D10C607 KLB KLF Electric Operation Guide of - Without InvertorDocument42 pagesD10C607 KLB KLF Electric Operation Guide of - Without InvertorHabibulla Bavaji100% (2)
- RF 2Document136 pagesRF 2Polinho DonacimentoNo ratings yet
- Smartrise Fault Table Troubleshooting Guide PDFDocument94 pagesSmartrise Fault Table Troubleshooting Guide PDFAhmedNo ratings yet
- WPC in Ice CreamDocument5 pagesWPC in Ice CreamIvan MojsaNo ratings yet
- DO2000 Programação DCSSDocument1 pageDO2000 Programação DCSSAlan LimachiNo ratings yet
- 05 Muse Acd3 T&C AdjustmentDocument10 pages05 Muse Acd3 T&C AdjustmentRaz Marendra RamanandaNo ratings yet
- Installing D3000 Door OperatorDocument6 pagesInstalling D3000 Door OperatorSyed iliyasNo ratings yet
- SURAPID Door Operator Manual XT0223S16023Document34 pagesSURAPID Door Operator Manual XT0223S16023victor zapataNo ratings yet
- Gcs - Gecb: Reference ListDocument31 pagesGcs - Gecb: Reference ListNebyu GetachewNo ratings yet
- JSA07924E-AA - E-Com Local Wiring (V300)Document17 pagesJSA07924E-AA - E-Com Local Wiring (V300)Mahmoud Omar RobNo ratings yet
- BD User Guide AP331400DAA - 2014-04-10Document167 pagesBD User Guide AP331400DAA - 2014-04-10diabNo ratings yet
- VVVF Control (Variable Voltage and Variable Feriquency) : 1-LX Operator PanelDocument13 pagesVVVF Control (Variable Voltage and Variable Feriquency) : 1-LX Operator PanelKen LeeNo ratings yet
- C604 AttachmentpaperDocument32 pagesC604 AttachmentpaperWander GomesNo ratings yet
- MicroZed v35 CatalogDocument32 pagesMicroZed v35 CataloghabibullaNo ratings yet
- Otis Otis Otis Otis: Elevator Company (India) LTDDocument7 pagesOtis Otis Otis Otis: Elevator Company (India) LTDjairaj bhogleNo ratings yet
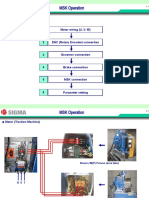
- 02 - MSK OperationDocument12 pages02 - MSK OperationMoises PerelloNo ratings yet
- MCB STMDocument33 pagesMCB STMyoussef akrkawNo ratings yet
- 3 - High-Speed CommissioningDocument29 pages3 - High-Speed CommissioningQuang Pham DuyNo ratings yet
- (PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17Document17 pages(PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17boneyNo ratings yet
- Instruction Manual: Car DoorDocument58 pagesInstruction Manual: Car Doorekrem kayaNo ratings yet
- 50302632D06 - en - F.2 - kdl16 - Diagnostic - Codes - 5.18 or Newer-1Document13 pages50302632D06 - en - F.2 - kdl16 - Diagnostic - Codes - 5.18 or Newer-1Pape SeckNo ratings yet
- Gaa 24350 Aw11 Ii PDFDocument22 pagesGaa 24350 Aw11 Ii PDFEvgeniy100% (1)
- 02 - Acd3 PCBDocument32 pages02 - Acd3 PCBRenee Carranza100% (1)
- Manual 40.10 PM-01.2016Document28 pagesManual 40.10 PM-01.2016Anonymous Mike100% (1)
- ECO Manual (CN En)Document55 pagesECO Manual (CN En)thi tran100% (1)
- برمجة الباب الصيني 2Document7 pagesبرمجة الباب الصيني 2AbdNo ratings yet
- Decoder For Monarch - STEP ManualDocument7 pagesDecoder For Monarch - STEP ManualMohammed HussenNo ratings yet
- Fermator SVT Manual EngDocument14 pagesFermator SVT Manual EngВлад Теле100% (1)
- COP User Manual 2.0 PDFDocument5 pagesCOP User Manual 2.0 PDFخالدعبدالله100% (1)
- DOC-FE - IE.IN.014156.EN Fermator Programming ToolDocument13 pagesDOC-FE - IE.IN.014156.EN Fermator Programming Toolguturi satyanarayana murthyNo ratings yet
- Gen2MR 31173Document12 pagesGen2MR 31173gtravaNo ratings yet
- MAG Explorer Instructions TM7304 - R4Document39 pagesMAG Explorer Instructions TM7304 - R4Robert AguilarNo ratings yet
- GeN2-Regen-HD Supplement of INSDocument29 pagesGeN2-Regen-HD Supplement of INSAbubeker JemalNo ratings yet
- 05-1. Standard IO MapDocument5 pages05-1. Standard IO MapБахтияр ЮмачиковNo ratings yet
- 3200 Elevator Motion Control Board With MCSS Service Tool GuideDocument46 pages3200 Elevator Motion Control Board With MCSS Service Tool GuideXavierNo ratings yet
- Otis GEN2 - Techna DO2000 Car DoorDocument46 pagesOtis GEN2 - Techna DO2000 Car DoorGregory BottiNo ratings yet
- TAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFDocument14 pagesTAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFViệt Thảo TrầnNo ratings yet
- Control System Adjust ManualDocument106 pagesControl System Adjust ManualMahmoud Rob100% (1)
- 100 - 1. Lift Controller ManualDocument41 pages100 - 1. Lift Controller ManualDjordje GavrilovicNo ratings yet
- Field Industrial Gen2 Lux Engineering Page Otis Nec Gien Amt Booklet Field PDFDocument35 pagesField Industrial Gen2 Lux Engineering Page Otis Nec Gien Amt Booklet Field PDFAnonymous 7Iyjn4T25zNo ratings yet
- Multi-Function Keypad "TP-G1-: Instruction ManualDocument64 pagesMulti-Function Keypad "TP-G1-: Instruction Manualjacky100% (1)
- ARL-500 UCM Test Instructions For Gearless Machines - enDocument2 pagesARL-500 UCM Test Instructions For Gearless Machines - enHenri KleineNo ratings yet
- Brake Board ManualDocument17 pagesBrake Board ManualMohamedElsawiNo ratings yet
- Control Elevador Zetadyn 1dvDocument62 pagesControl Elevador Zetadyn 1dvoro plata100% (1)
- Encoder Basics: Output Signals of Incremental EncodersDocument34 pagesEncoder Basics: Output Signals of Incremental EncodersMelchor VasquezNo ratings yet
- 10 6991F 1 PDFDocument10 pages10 6991F 1 PDFasdfNo ratings yet
- F5021 PDFDocument130 pagesF5021 PDFCristian MillanNo ratings yet
- 20190401Document232 pages20190401rendy kurniawanNo ratings yet
- Supra Wittur Door Operator ManualDocument3 pagesSupra Wittur Door Operator ManualclaudioNo ratings yet
- Amphitec Branchement PDFDocument20 pagesAmphitec Branchement PDFJms QuinteroNo ratings yet
- Main Control Board User ManualDocument15 pagesMain Control Board User Manualmohammedalathwary100% (1)
- 100-170 ManualDocument59 pages100-170 ManualReza KühnNo ratings yet
- Escalator Switches AdjustmentDocument6 pagesEscalator Switches AdjustmentSANAL KUMAR SNo ratings yet
- Fuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalDocument1 pageFuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalJaouad LahdarNo ratings yet
- Copia de VF7 Doc 2017Document25 pagesCopia de VF7 Doc 2017Edgar ZamoraNo ratings yet
- Door Drive WiringDocument24 pagesDoor Drive WiringSANAL KUMAR SNo ratings yet
- Installation Notice: All Right ReservedDocument46 pagesInstallation Notice: All Right ReservedPaul CollinsNo ratings yet
- Enviando Astra - v11 PDFDocument17 pagesEnviando Astra - v11 PDFJohn Fredi Hernandez QuinteroNo ratings yet
- Xba 26201 Al-SvtmanualespdfDocument37 pagesXba 26201 Al-SvtmanualespdfRafael BrunoNo ratings yet
- ايتينورDocument48 pagesايتينورمحمد حسينNo ratings yet
- Otis SigmaDocument56 pagesOtis SigmaSERIMER SAS100% (2)
- Tne 162 Ban VeDocument8 pagesTne 162 Ban VeQuang Pham DuyNo ratings yet
- Lift - TMDocument7 pagesLift - TMQuang Pham DuyNo ratings yet
- Manual Sigma BG221Document29 pagesManual Sigma BG221Quang Pham DuyNo ratings yet
- BG202 XM Ii (E)Document10 pagesBG202 XM Ii (E)Quang Pham DuyNo ratings yet
- 3 - High-Speed CommissioningDocument29 pages3 - High-Speed CommissioningQuang Pham DuyNo ratings yet
- Hố W1400 x D1200 - Mặt Cắt Hố ThangDocument1 pageHố W1400 x D1200 - Mặt Cắt Hố ThangQuang Pham DuyNo ratings yet
- FILE - 20220705 - 213146 - Thông Báo Tăng GiáDocument2 pagesFILE - 20220705 - 213146 - Thông Báo Tăng GiáQuang Pham DuyNo ratings yet
- BG202-OE31E: 1、Functional keys introductionDocument10 pagesBG202-OE31E: 1、Functional keys introductionQuang Pham DuyNo ratings yet
- File 20220705 213146 DaDocument3 pagesFile 20220705 213146 DaQuang Pham DuyNo ratings yet
- R4EQ (Earthquake Operation Input) : (Nud. CLOSE, SPD 1/2, Force 2 Times)Document9 pagesR4EQ (Earthquake Operation Input) : (Nud. CLOSE, SPD 1/2, Force 2 Times)Quang Pham DuyNo ratings yet
- PG 18-10 - Elevator Design Manual October 1, 2020Document12 pagesPG 18-10 - Elevator Design Manual October 1, 2020choaybNo ratings yet
- Title DI1 (60 105m/min) Annunciator Function Setting ModeDocument12 pagesTitle DI1 (60 105m/min) Annunciator Function Setting ModeQuang Pham DuyNo ratings yet
- Unidentified Alarm Occurrence / Run CPU Address Error: Point of Detection ApplicationDocument1 pageUnidentified Alarm Occurrence / Run CPU Address Error: Point of Detection ApplicationQuang Pham DuyNo ratings yet
- Unpublished Work-© Otis Elevator Co. 2009Document33 pagesUnpublished Work-© Otis Elevator Co. 2009Quang Pham Duy100% (1)
- 4 - Adjusting High-Speed Commissioning PDFDocument19 pages4 - Adjusting High-Speed Commissioning PDFQuang Pham DuyNo ratings yet
- TCD 001 PDFDocument1 pageTCD 001 PDFQuang Pham DuyNo ratings yet
- C U H Máy Kéo Sigma OtisDocument45 pagesC U H Máy Kéo Sigma OtisQuang Pham DuyNo ratings yet
- Kiểm tra tác động Sw COMPLATE - khe hở sàn Esc Otis Express -Document2 pagesKiểm tra tác động Sw COMPLATE - khe hở sàn Esc Otis Express -Quang Pham DuyNo ratings yet
- Di1 Spec. Address ListDocument45 pagesDi1 Spec. Address ListQuang Pham DuyNo ratings yet
- Prs ElevatorDocument1 pagePrs ElevatorQuang Pham DuyNo ratings yet
- Loadcell ElevatorDocument1 pageLoadcell ElevatorQuang Pham Duy100% (1)
- Ims Thyssen ElevatorDocument1 pageIms Thyssen ElevatorQuang Pham DuyNo ratings yet
- C U H Máy Kéo Sigma OtisDocument45 pagesC U H Máy Kéo Sigma OtisQuang Pham DuyNo ratings yet
- Pm100rl1a120 E2Document9 pagesPm100rl1a120 E2Quang Pham DuyNo ratings yet
- Etsd ThyssenDocument14 pagesEtsd ThyssenQuang Pham DuyNo ratings yet
- Loadcell DZK-CP MớiDocument12 pagesLoadcell DZK-CP MớiQuang Pham Duy50% (2)
- SDS Error: Refer To 3x02228 I/O C.Document1 pageSDS Error: Refer To 3x02228 I/O C.Quang Pham Duy50% (2)
- HSVFDocument9 pagesHSVFQuang Pham DuyNo ratings yet
- Data Privacy OrientationDocument15 pagesData Privacy OrientationNormzz Sapitula100% (1)
- Irrigation Manual FAO Module 7Document169 pagesIrrigation Manual FAO Module 7Zac Mweb86% (7)
- Online Ordering DocuDocument55 pagesOnline Ordering Docuvinalyn apolinarNo ratings yet
- Hospital Document Star Health Insurance Hospital MOUDocument9 pagesHospital Document Star Health Insurance Hospital MOUSanket Sahare100% (1)
- Abg-Semca S.A Toulouse: September 1974Document22 pagesAbg-Semca S.A Toulouse: September 1974jackNo ratings yet
- Geotechnical Factual ReportDocument89 pagesGeotechnical Factual ReportMohamed RusfanNo ratings yet
- Open Fracture Tibia Fibula FixDocument42 pagesOpen Fracture Tibia Fibula Fixannisaoktoviani100% (1)
- 529 Ema Ratna Kartinawati Ikatan Dokter Indonesia15570678505ccef84b102a3Document1 page529 Ema Ratna Kartinawati Ikatan Dokter Indonesia15570678505ccef84b102a3Ema Ratna KartinawatiNo ratings yet
- Proposed Rule: Medicare: Electronic Prescription Drug Program E-PrescribingDocument20 pagesProposed Rule: Medicare: Electronic Prescription Drug Program E-PrescribingJustia.comNo ratings yet
- English File Intermediate Third Edition-Pages-5-8Document4 pagesEnglish File Intermediate Third Edition-Pages-5-8akbal13No ratings yet
- 304 Stainless Steel Chemical Compatibility Chart From IsmDocument11 pages304 Stainless Steel Chemical Compatibility Chart From IsmchenNo ratings yet
- Functional Safety Embedded Systems: Integration of in The Development Process ofDocument34 pagesFunctional Safety Embedded Systems: Integration of in The Development Process ofAleksandar MilinkovicNo ratings yet
- Test Glo-Qc-Tm-0744Document6 pagesTest Glo-Qc-Tm-0744rx bafnaNo ratings yet
- Non-Ferrous Extractive Metallurgy Prof. H. S. Ray Department of Metallurgical and Materials Engineering Indian Institute of Technology, KharagpurDocument22 pagesNon-Ferrous Extractive Metallurgy Prof. H. S. Ray Department of Metallurgical and Materials Engineering Indian Institute of Technology, Kharagpursubrat754No ratings yet
- Solubility Equilibria Tutorial Answers OHTDocument4 pagesSolubility Equilibria Tutorial Answers OHTDomNo ratings yet
- HLS T78Document2 pagesHLS T78Power electronicsNo ratings yet
- Doyles On The Wharf Watson'S Bay: Take Away / Bistro MenuDocument1 pageDoyles On The Wharf Watson'S Bay: Take Away / Bistro Menumary_faddoul8556No ratings yet
- Biology MALNUTRITION ProjectDocument17 pagesBiology MALNUTRITION ProjectEbin Off16No ratings yet
- Phytochemical Screening and Anthelmintic Activity of Flower Extract of Nyctanthes Arbor TristisDocument8 pagesPhytochemical Screening and Anthelmintic Activity of Flower Extract of Nyctanthes Arbor TristisEditor IJTSRDNo ratings yet
- Antibiotic Resistance in Pseudomonas Aeruginosa - MechanismsDocument22 pagesAntibiotic Resistance in Pseudomonas Aeruginosa - MechanismsValentina RondonNo ratings yet
- Form Hasil Pemeriksaan Laboratorium 2Document5 pagesForm Hasil Pemeriksaan Laboratorium 2puskesmas sarijadiNo ratings yet
- 9500-WGEL-G000-ISGP-G00000-CX-7880 - Specification For Structural Fire ProofingDocument15 pages9500-WGEL-G000-ISGP-G00000-CX-7880 - Specification For Structural Fire ProofingArshad IqbalNo ratings yet
- Michael's On East Lunch MenuDocument2 pagesMichael's On East Lunch Menusupport_local_flavorNo ratings yet
- Plastic Codes and RecyclingDocument2 pagesPlastic Codes and RecyclingTruck DriverNo ratings yet
- Uhv Unit 4Document25 pagesUhv Unit 4Radha KrishnaNo ratings yet
- MTO MATERIAL OHL 20 KVDocument4 pagesMTO MATERIAL OHL 20 KVDacid ChalinkNo ratings yet
- Perspective: The Integrative Human Microbiome ProjectDocument8 pagesPerspective: The Integrative Human Microbiome Projectdainsyah dainNo ratings yet
- Fall Arrest SystemDocument16 pagesFall Arrest SystemDragos VerdesNo ratings yet


















































































































Download as pdf or txt
You might also like
- FS Kakanin Feasibility Study Ana Adona 2018Document112 pagesFS Kakanin Feasibility Study Ana Adona 2018Dang Bi100% (4)
- D10C607 KLB KLF Electric Operation Guide of - Without InvertorDocument42 pagesD10C607 KLB KLF Electric Operation Guide of - Without InvertorHabibulla Bavaji100% (2)
- RF 2Document136 pagesRF 2Polinho DonacimentoNo ratings yet
- Smartrise Fault Table Troubleshooting Guide PDFDocument94 pagesSmartrise Fault Table Troubleshooting Guide PDFAhmedNo ratings yet
- WPC in Ice CreamDocument5 pagesWPC in Ice CreamIvan MojsaNo ratings yet
- DO2000 Programação DCSSDocument1 pageDO2000 Programação DCSSAlan LimachiNo ratings yet
- 05 Muse Acd3 T&C AdjustmentDocument10 pages05 Muse Acd3 T&C AdjustmentRaz Marendra RamanandaNo ratings yet
- Installing D3000 Door OperatorDocument6 pagesInstalling D3000 Door OperatorSyed iliyasNo ratings yet
- SURAPID Door Operator Manual XT0223S16023Document34 pagesSURAPID Door Operator Manual XT0223S16023victor zapataNo ratings yet
- Gcs - Gecb: Reference ListDocument31 pagesGcs - Gecb: Reference ListNebyu GetachewNo ratings yet
- JSA07924E-AA - E-Com Local Wiring (V300)Document17 pagesJSA07924E-AA - E-Com Local Wiring (V300)Mahmoud Omar RobNo ratings yet
- BD User Guide AP331400DAA - 2014-04-10Document167 pagesBD User Guide AP331400DAA - 2014-04-10diabNo ratings yet
- VVVF Control (Variable Voltage and Variable Feriquency) : 1-LX Operator PanelDocument13 pagesVVVF Control (Variable Voltage and Variable Feriquency) : 1-LX Operator PanelKen LeeNo ratings yet
- C604 AttachmentpaperDocument32 pagesC604 AttachmentpaperWander GomesNo ratings yet
- MicroZed v35 CatalogDocument32 pagesMicroZed v35 CataloghabibullaNo ratings yet
- Otis Otis Otis Otis: Elevator Company (India) LTDDocument7 pagesOtis Otis Otis Otis: Elevator Company (India) LTDjairaj bhogleNo ratings yet
- 02 - MSK OperationDocument12 pages02 - MSK OperationMoises PerelloNo ratings yet
- MCB STMDocument33 pagesMCB STMyoussef akrkawNo ratings yet
- 3 - High-Speed CommissioningDocument29 pages3 - High-Speed CommissioningQuang Pham DuyNo ratings yet
- (PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17Document17 pages(PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17boneyNo ratings yet
- Instruction Manual: Car DoorDocument58 pagesInstruction Manual: Car Doorekrem kayaNo ratings yet
- 50302632D06 - en - F.2 - kdl16 - Diagnostic - Codes - 5.18 or Newer-1Document13 pages50302632D06 - en - F.2 - kdl16 - Diagnostic - Codes - 5.18 or Newer-1Pape SeckNo ratings yet
- Gaa 24350 Aw11 Ii PDFDocument22 pagesGaa 24350 Aw11 Ii PDFEvgeniy100% (1)
- 02 - Acd3 PCBDocument32 pages02 - Acd3 PCBRenee Carranza100% (1)
- Manual 40.10 PM-01.2016Document28 pagesManual 40.10 PM-01.2016Anonymous Mike100% (1)
- ECO Manual (CN En)Document55 pagesECO Manual (CN En)thi tran100% (1)
- برمجة الباب الصيني 2Document7 pagesبرمجة الباب الصيني 2AbdNo ratings yet
- Decoder For Monarch - STEP ManualDocument7 pagesDecoder For Monarch - STEP ManualMohammed HussenNo ratings yet
- Fermator SVT Manual EngDocument14 pagesFermator SVT Manual EngВлад Теле100% (1)
- COP User Manual 2.0 PDFDocument5 pagesCOP User Manual 2.0 PDFخالدعبدالله100% (1)
- DOC-FE - IE.IN.014156.EN Fermator Programming ToolDocument13 pagesDOC-FE - IE.IN.014156.EN Fermator Programming Toolguturi satyanarayana murthyNo ratings yet
- Gen2MR 31173Document12 pagesGen2MR 31173gtravaNo ratings yet
- MAG Explorer Instructions TM7304 - R4Document39 pagesMAG Explorer Instructions TM7304 - R4Robert AguilarNo ratings yet
- GeN2-Regen-HD Supplement of INSDocument29 pagesGeN2-Regen-HD Supplement of INSAbubeker JemalNo ratings yet
- 05-1. Standard IO MapDocument5 pages05-1. Standard IO MapБахтияр ЮмачиковNo ratings yet
- 3200 Elevator Motion Control Board With MCSS Service Tool GuideDocument46 pages3200 Elevator Motion Control Board With MCSS Service Tool GuideXavierNo ratings yet
- Otis GEN2 - Techna DO2000 Car DoorDocument46 pagesOtis GEN2 - Techna DO2000 Car DoorGregory BottiNo ratings yet
- TAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFDocument14 pagesTAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFViệt Thảo TrầnNo ratings yet
- Control System Adjust ManualDocument106 pagesControl System Adjust ManualMahmoud Rob100% (1)
- 100 - 1. Lift Controller ManualDocument41 pages100 - 1. Lift Controller ManualDjordje GavrilovicNo ratings yet
- Field Industrial Gen2 Lux Engineering Page Otis Nec Gien Amt Booklet Field PDFDocument35 pagesField Industrial Gen2 Lux Engineering Page Otis Nec Gien Amt Booklet Field PDFAnonymous 7Iyjn4T25zNo ratings yet
- Multi-Function Keypad "TP-G1-: Instruction ManualDocument64 pagesMulti-Function Keypad "TP-G1-: Instruction Manualjacky100% (1)
- ARL-500 UCM Test Instructions For Gearless Machines - enDocument2 pagesARL-500 UCM Test Instructions For Gearless Machines - enHenri KleineNo ratings yet
- Brake Board ManualDocument17 pagesBrake Board ManualMohamedElsawiNo ratings yet
- Control Elevador Zetadyn 1dvDocument62 pagesControl Elevador Zetadyn 1dvoro plata100% (1)
- Encoder Basics: Output Signals of Incremental EncodersDocument34 pagesEncoder Basics: Output Signals of Incremental EncodersMelchor VasquezNo ratings yet
- 10 6991F 1 PDFDocument10 pages10 6991F 1 PDFasdfNo ratings yet
- F5021 PDFDocument130 pagesF5021 PDFCristian MillanNo ratings yet
- 20190401Document232 pages20190401rendy kurniawanNo ratings yet
- Supra Wittur Door Operator ManualDocument3 pagesSupra Wittur Door Operator ManualclaudioNo ratings yet
- Amphitec Branchement PDFDocument20 pagesAmphitec Branchement PDFJms QuinteroNo ratings yet
- Main Control Board User ManualDocument15 pagesMain Control Board User Manualmohammedalathwary100% (1)
- 100-170 ManualDocument59 pages100-170 ManualReza KühnNo ratings yet
- Escalator Switches AdjustmentDocument6 pagesEscalator Switches AdjustmentSANAL KUMAR SNo ratings yet
- Fuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalDocument1 pageFuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalJaouad LahdarNo ratings yet
- Copia de VF7 Doc 2017Document25 pagesCopia de VF7 Doc 2017Edgar ZamoraNo ratings yet
- Door Drive WiringDocument24 pagesDoor Drive WiringSANAL KUMAR SNo ratings yet
- Installation Notice: All Right ReservedDocument46 pagesInstallation Notice: All Right ReservedPaul CollinsNo ratings yet
- Enviando Astra - v11 PDFDocument17 pagesEnviando Astra - v11 PDFJohn Fredi Hernandez QuinteroNo ratings yet
- Xba 26201 Al-SvtmanualespdfDocument37 pagesXba 26201 Al-SvtmanualespdfRafael BrunoNo ratings yet
- ايتينورDocument48 pagesايتينورمحمد حسينNo ratings yet
- Otis SigmaDocument56 pagesOtis SigmaSERIMER SAS100% (2)
- Tne 162 Ban VeDocument8 pagesTne 162 Ban VeQuang Pham DuyNo ratings yet
- Lift - TMDocument7 pagesLift - TMQuang Pham DuyNo ratings yet
- Manual Sigma BG221Document29 pagesManual Sigma BG221Quang Pham DuyNo ratings yet
- BG202 XM Ii (E)Document10 pagesBG202 XM Ii (E)Quang Pham DuyNo ratings yet
- 3 - High-Speed CommissioningDocument29 pages3 - High-Speed CommissioningQuang Pham DuyNo ratings yet
- Hố W1400 x D1200 - Mặt Cắt Hố ThangDocument1 pageHố W1400 x D1200 - Mặt Cắt Hố ThangQuang Pham DuyNo ratings yet
- FILE - 20220705 - 213146 - Thông Báo Tăng GiáDocument2 pagesFILE - 20220705 - 213146 - Thông Báo Tăng GiáQuang Pham DuyNo ratings yet
- BG202-OE31E: 1、Functional keys introductionDocument10 pagesBG202-OE31E: 1、Functional keys introductionQuang Pham DuyNo ratings yet
- File 20220705 213146 DaDocument3 pagesFile 20220705 213146 DaQuang Pham DuyNo ratings yet
- R4EQ (Earthquake Operation Input) : (Nud. CLOSE, SPD 1/2, Force 2 Times)Document9 pagesR4EQ (Earthquake Operation Input) : (Nud. CLOSE, SPD 1/2, Force 2 Times)Quang Pham DuyNo ratings yet
- PG 18-10 - Elevator Design Manual October 1, 2020Document12 pagesPG 18-10 - Elevator Design Manual October 1, 2020choaybNo ratings yet
- Title DI1 (60 105m/min) Annunciator Function Setting ModeDocument12 pagesTitle DI1 (60 105m/min) Annunciator Function Setting ModeQuang Pham DuyNo ratings yet
- Unidentified Alarm Occurrence / Run CPU Address Error: Point of Detection ApplicationDocument1 pageUnidentified Alarm Occurrence / Run CPU Address Error: Point of Detection ApplicationQuang Pham DuyNo ratings yet
- Unpublished Work-© Otis Elevator Co. 2009Document33 pagesUnpublished Work-© Otis Elevator Co. 2009Quang Pham Duy100% (1)
- 4 - Adjusting High-Speed Commissioning PDFDocument19 pages4 - Adjusting High-Speed Commissioning PDFQuang Pham DuyNo ratings yet
- TCD 001 PDFDocument1 pageTCD 001 PDFQuang Pham DuyNo ratings yet
- C U H Máy Kéo Sigma OtisDocument45 pagesC U H Máy Kéo Sigma OtisQuang Pham DuyNo ratings yet
- Kiểm tra tác động Sw COMPLATE - khe hở sàn Esc Otis Express -Document2 pagesKiểm tra tác động Sw COMPLATE - khe hở sàn Esc Otis Express -Quang Pham DuyNo ratings yet
- Di1 Spec. Address ListDocument45 pagesDi1 Spec. Address ListQuang Pham DuyNo ratings yet
- Prs ElevatorDocument1 pagePrs ElevatorQuang Pham DuyNo ratings yet
- Loadcell ElevatorDocument1 pageLoadcell ElevatorQuang Pham Duy100% (1)
- Ims Thyssen ElevatorDocument1 pageIms Thyssen ElevatorQuang Pham DuyNo ratings yet
- C U H Máy Kéo Sigma OtisDocument45 pagesC U H Máy Kéo Sigma OtisQuang Pham DuyNo ratings yet
- Pm100rl1a120 E2Document9 pagesPm100rl1a120 E2Quang Pham DuyNo ratings yet
- Etsd ThyssenDocument14 pagesEtsd ThyssenQuang Pham DuyNo ratings yet
- Loadcell DZK-CP MớiDocument12 pagesLoadcell DZK-CP MớiQuang Pham Duy50% (2)
- SDS Error: Refer To 3x02228 I/O C.Document1 pageSDS Error: Refer To 3x02228 I/O C.Quang Pham Duy50% (2)
- HSVFDocument9 pagesHSVFQuang Pham DuyNo ratings yet
- Data Privacy OrientationDocument15 pagesData Privacy OrientationNormzz Sapitula100% (1)
- Irrigation Manual FAO Module 7Document169 pagesIrrigation Manual FAO Module 7Zac Mweb86% (7)
- Online Ordering DocuDocument55 pagesOnline Ordering Docuvinalyn apolinarNo ratings yet
- Hospital Document Star Health Insurance Hospital MOUDocument9 pagesHospital Document Star Health Insurance Hospital MOUSanket Sahare100% (1)
- Abg-Semca S.A Toulouse: September 1974Document22 pagesAbg-Semca S.A Toulouse: September 1974jackNo ratings yet
- Geotechnical Factual ReportDocument89 pagesGeotechnical Factual ReportMohamed RusfanNo ratings yet
- Open Fracture Tibia Fibula FixDocument42 pagesOpen Fracture Tibia Fibula Fixannisaoktoviani100% (1)
- 529 Ema Ratna Kartinawati Ikatan Dokter Indonesia15570678505ccef84b102a3Document1 page529 Ema Ratna Kartinawati Ikatan Dokter Indonesia15570678505ccef84b102a3Ema Ratna KartinawatiNo ratings yet
- Proposed Rule: Medicare: Electronic Prescription Drug Program E-PrescribingDocument20 pagesProposed Rule: Medicare: Electronic Prescription Drug Program E-PrescribingJustia.comNo ratings yet
- English File Intermediate Third Edition-Pages-5-8Document4 pagesEnglish File Intermediate Third Edition-Pages-5-8akbal13No ratings yet
- 304 Stainless Steel Chemical Compatibility Chart From IsmDocument11 pages304 Stainless Steel Chemical Compatibility Chart From IsmchenNo ratings yet
- Functional Safety Embedded Systems: Integration of in The Development Process ofDocument34 pagesFunctional Safety Embedded Systems: Integration of in The Development Process ofAleksandar MilinkovicNo ratings yet
- Test Glo-Qc-Tm-0744Document6 pagesTest Glo-Qc-Tm-0744rx bafnaNo ratings yet
- Non-Ferrous Extractive Metallurgy Prof. H. S. Ray Department of Metallurgical and Materials Engineering Indian Institute of Technology, KharagpurDocument22 pagesNon-Ferrous Extractive Metallurgy Prof. H. S. Ray Department of Metallurgical and Materials Engineering Indian Institute of Technology, Kharagpursubrat754No ratings yet
- Solubility Equilibria Tutorial Answers OHTDocument4 pagesSolubility Equilibria Tutorial Answers OHTDomNo ratings yet
- HLS T78Document2 pagesHLS T78Power electronicsNo ratings yet
- Doyles On The Wharf Watson'S Bay: Take Away / Bistro MenuDocument1 pageDoyles On The Wharf Watson'S Bay: Take Away / Bistro Menumary_faddoul8556No ratings yet
- Biology MALNUTRITION ProjectDocument17 pagesBiology MALNUTRITION ProjectEbin Off16No ratings yet
- Phytochemical Screening and Anthelmintic Activity of Flower Extract of Nyctanthes Arbor TristisDocument8 pagesPhytochemical Screening and Anthelmintic Activity of Flower Extract of Nyctanthes Arbor TristisEditor IJTSRDNo ratings yet
- Antibiotic Resistance in Pseudomonas Aeruginosa - MechanismsDocument22 pagesAntibiotic Resistance in Pseudomonas Aeruginosa - MechanismsValentina RondonNo ratings yet
- Form Hasil Pemeriksaan Laboratorium 2Document5 pagesForm Hasil Pemeriksaan Laboratorium 2puskesmas sarijadiNo ratings yet
- 9500-WGEL-G000-ISGP-G00000-CX-7880 - Specification For Structural Fire ProofingDocument15 pages9500-WGEL-G000-ISGP-G00000-CX-7880 - Specification For Structural Fire ProofingArshad IqbalNo ratings yet
- Michael's On East Lunch MenuDocument2 pagesMichael's On East Lunch Menusupport_local_flavorNo ratings yet
- Plastic Codes and RecyclingDocument2 pagesPlastic Codes and RecyclingTruck DriverNo ratings yet
- Uhv Unit 4Document25 pagesUhv Unit 4Radha KrishnaNo ratings yet
- MTO MATERIAL OHL 20 KVDocument4 pagesMTO MATERIAL OHL 20 KVDacid ChalinkNo ratings yet
- Perspective: The Integrative Human Microbiome ProjectDocument8 pagesPerspective: The Integrative Human Microbiome Projectdainsyah dainNo ratings yet
- Fall Arrest SystemDocument16 pagesFall Arrest SystemDragos VerdesNo ratings yet