Download as doc, pdf, or txt
You might also like
- DNV-RU-SHIP Pt.3 Ch.4-3Document97 pagesDNV-RU-SHIP Pt.3 Ch.4-3Tumul100% (1)
- Math in Our World 3rd Edition Sobecki Solutions ManualDocument35 pagesMath in Our World 3rd Edition Sobecki Solutions ManualKylieWilsonkpzrg100% (15)
- DC-AC Conversion - Lecture 10, 11 and 12Document45 pagesDC-AC Conversion - Lecture 10, 11 and 12madiha100% (1)
- BBV RS422 Telemetry Control Protocol V3 Dec 08Document8 pagesBBV RS422 Telemetry Control Protocol V3 Dec 08rodrigoaranhaNo ratings yet
- Boost Control ModbusDocument8 pagesBoost Control ModbusALROTEK CRNo ratings yet
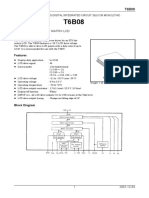
- Row Driver For A Dot Matrix LCD: FeaturesDocument10 pagesRow Driver For A Dot Matrix LCD: FeaturesPetr -No ratings yet
- Configuración Del DispositivoDocument4 pagesConfiguración Del DispositivoJosé ZamoraNo ratings yet
- Servo InstructionDocument13 pagesServo InstructionZakaria ElhaouriNo ratings yet
- s7 200 Quick Reference Info enDocument6 pagess7 200 Quick Reference Info endangkhuyenmaiNo ratings yet
- Infineon IRS218!4!44 and IR218 4 44 Comparison An v01 00 enDocument6 pagesInfineon IRS218!4!44 and IR218 4 44 Comparison An v01 00 enNini FarribasNo ratings yet
- Chapter 6 ConvertersDocument50 pagesChapter 6 ConvertersGohgulan Murugan100% (2)
- RT-300 Industrial JoystickDocument13 pagesRT-300 Industrial JoystickRunnTechNo ratings yet
- Precicon-R Dcsim Data Resistor MapDocument3 pagesPrecicon-R Dcsim Data Resistor Mapputul deyNo ratings yet
- Main Report For Experiment 1: ObjectivesDocument6 pagesMain Report For Experiment 1: Objectives이훈석No ratings yet
- WECON VD2 A Type Servo FlyerDocument4 pagesWECON VD2 A Type Servo FlyerZakaria ElhaouriNo ratings yet
- CODE Midi Implementation Chart V2.1Document10 pagesCODE Midi Implementation Chart V2.1Vidal MartinsNo ratings yet
- Circuito Ls 7084 DatasheetDocument4 pagesCircuito Ls 7084 DatasheetEdna Rocío Plazas GarcíaNo ratings yet
- HF Series: Hall Effect JoysticksDocument9 pagesHF Series: Hall Effect JoysticksRich ManNo ratings yet
- Parameter Inverter Varispeed-606PC3 Profile Sanding LasiiDocument4 pagesParameter Inverter Varispeed-606PC3 Profile Sanding LasiiArief RakhmadNo ratings yet
- Azbil SDC25Document2 pagesAzbil SDC25hafizuddinrazaliNo ratings yet
- DACDocument33 pagesDACSamsuzzaman TutulNo ratings yet
- G90 Ci-V ReferenceDocument2 pagesG90 Ci-V Referencemy_scribd_20100607No ratings yet
- Digital To Analog Converters (Dac)Document27 pagesDigital To Analog Converters (Dac)رهف عبد اللهNo ratings yet
- Model Vfd-Ve 2,12 Rated Current 8,5A Rated Voltage 460V HP 3,7 (5)Document32 pagesModel Vfd-Ve 2,12 Rated Current 8,5A Rated Voltage 460V HP 3,7 (5)muhamad.badar9285No ratings yet
- Modbus Map VLT - R0Document8 pagesModbus Map VLT - R0gallegos70No ratings yet
- DatasheetDocument4 pagesDatasheetLorant SzalmaNo ratings yet
- PVI 50/60TL: Modbus CommunicationsDocument34 pagesPVI 50/60TL: Modbus CommunicationsBaggi NNo ratings yet
- Systronix 20x4 LCD Brief Technical DataDocument7 pagesSystronix 20x4 LCD Brief Technical Dataferi athNo ratings yet
- Technical Doc Genstar MPPT Modbus Specification enDocument25 pagesTechnical Doc Genstar MPPT Modbus Specification enbryan.sladeNo ratings yet
- The Inverter The Inverter: ReferencesDocument124 pagesThe Inverter The Inverter: Referencessalman1992No ratings yet
- Week 3Document97 pagesWeek 3abbazh rakhondeNo ratings yet
- IR21084Document8 pagesIR21084Zobayer ShahNo ratings yet
- MM58242VDocument6 pagesMM58242VNikolayNo ratings yet
- HCTL 2016Document19 pagesHCTL 2016Odair SilvaNo ratings yet
- BCT4302B: Dual SIM Card ControllerDocument9 pagesBCT4302B: Dual SIM Card ControllereugeneNo ratings yet
- IR2101/IR21014 IR2102/IR21024: High and Low Side DriverDocument15 pagesIR2101/IR21014 IR2102/IR21024: High and Low Side Driverrobsontecladista4164No ratings yet
- MM58274CDocument16 pagesMM58274CThomasNo ratings yet
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- SPED Instruction From W451Document6 pagesSPED Instruction From W451Papahnya Qiana MaulinaNo ratings yet
- Quick Start UpDocument8 pagesQuick Start Uphino_kaguNo ratings yet
- Bd9576muf C eDocument93 pagesBd9576muf C eFaizan IrfanNo ratings yet
- Technical Doc Prostar Modbus Specification enDocument29 pagesTechnical Doc Prostar Modbus Specification enRyoma KuugaNo ratings yet
- GOLINK - PID Temperature Controls - YASTRONICSDocument1 pageGOLINK - PID Temperature Controls - YASTRONICSMainathan NagarajanNo ratings yet
- R3132 DatasheetDocument19 pagesR3132 Datasheetmvw7nqzfj6100% (1)
- CXD1175AM/AP: 8-Bit 20MSPS Video A/D Converter (CMOS)Document21 pagesCXD1175AM/AP: 8-Bit 20MSPS Video A/D Converter (CMOS)raviNo ratings yet
- IV ZenerDocument10 pagesIV ZenerMaida PhysicistNo ratings yet
- S7-200 Quick Reference Information: Special Memory BitsDocument6 pagesS7-200 Quick Reference Information: Special Memory BitsDjNIAZINo ratings yet
- High Speed Counter - PositionDocument5 pagesHigh Speed Counter - PositionBoy Mỉm CườiNo ratings yet
- Purpose:: Lab 8 ProtocolDocument4 pagesPurpose:: Lab 8 Protocolapi-532084286No ratings yet
- Viewsonic 655 - KA2500.1Document14 pagesViewsonic 655 - KA2500.1qfacuNo ratings yet
- Multi-Axis Controller: Technical DataDocument11 pagesMulti-Axis Controller: Technical DataAof ThiwakornNo ratings yet
- PVS175 - PICS - DRAFT - Rev 1.2Document120 pagesPVS175 - PICS - DRAFT - Rev 1.2Denny JimenezNo ratings yet
- DC-AC Conversion - Lecture 10Document15 pagesDC-AC Conversion - Lecture 10madihaNo ratings yet
- 极空RS486 Modbus协议Document8 pages极空RS486 Modbus协议Jack GoNo ratings yet
- 8 Reset PDFDocument20 pages8 Reset PDFnicolas8702No ratings yet
- REM54 Parlist 751784 ENc PDFDocument158 pagesREM54 Parlist 751784 ENc PDFIrfan AshrafNo ratings yet
- Dokumen - Tips Prostar MPPT Modbus Specification The Prostar MPPT Supports Rtu Mode Only 16bitDocument31 pagesDokumen - Tips Prostar MPPT Modbus Specification The Prostar MPPT Supports Rtu Mode Only 16bitAlberto Xilotl SolanoNo ratings yet
- V4580 DatasheetDocument8 pagesV4580 DatasheetivanychforeverNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- The Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationFrom EverandThe Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationNo ratings yet
- Beamex Ebook Calibration Essentials PressureDocument40 pagesBeamex Ebook Calibration Essentials PressureGilberto FigueroaNo ratings yet
- Beamex Ebook Calibration Essentials PressureDocument40 pagesBeamex Ebook Calibration Essentials PressureGilberto FigueroaNo ratings yet
- Manual Calog LC - IIDocument18 pagesManual Calog LC - IIGilberto Figueroa100% (1)
- 210 Spanish Technical ManualDocument120 pages210 Spanish Technical ManualGilberto FigueroaNo ratings yet
- Specification of Alt400hp Inkjet Printer-2018!07!24Document6 pagesSpecification of Alt400hp Inkjet Printer-2018!07!24Gilberto FigueroaNo ratings yet
- UniMAT Servo Set ManualDocument84 pagesUniMAT Servo Set ManualGilberto Figueroa100% (1)
- UN 200 Comunicates IM261ModbusDocument8 pagesUN 200 Comunicates IM261ModbusGilberto FigueroaNo ratings yet
- FFX Side Mounting Float Switch - New - 658787221Document16 pagesFFX Side Mounting Float Switch - New - 658787221Gilberto FigueroaNo ratings yet
- Lead CNC Assembly Instructions v1.0 01 2019Document27 pagesLead CNC Assembly Instructions v1.0 01 2019Bonnelly Peralta AlmanzarNo ratings yet
- MeasureMind 3D Fast Start GuideDocument103 pagesMeasureMind 3D Fast Start GuidePhạm Quốc BảoNo ratings yet
- Plot Matlab PDFDocument4 pagesPlot Matlab PDFMuhammad Izzan H.SNo ratings yet
- Grade 9: Coordinate GeometryDocument5 pagesGrade 9: Coordinate GeometryEduGainNo ratings yet
- Rectangular Coordinate SystemDocument14 pagesRectangular Coordinate SystemMatsuri VirusNo ratings yet
- Geothermal EnergyDocument25 pagesGeothermal EnergyHenry ViernesNo ratings yet
- Basics of Matlab-1Document69 pagesBasics of Matlab-1soumenchaNo ratings yet
- Risa FoundationDocument14 pagesRisa Foundationpolin27No ratings yet
- AriHant MATHEMATICSDocument15 pagesAriHant MATHEMATICSNareshJagathkar100% (1)
- Joaquín MarinDocument7 pagesJoaquín Marinestefani sierraNo ratings yet
- Creating Intuitive Interactive Dashboards With The Adf Data Visualization ComponentsDocument74 pagesCreating Intuitive Interactive Dashboards With The Adf Data Visualization ComponentsnandhulnNo ratings yet
- B. Hague D.SC., PH.D., F.C.G.I. (Auth.) - An Introduction To Vector Analysis For Physicists and Engineers-Springer Netherlands (1970)Document129 pagesB. Hague D.SC., PH.D., F.C.G.I. (Auth.) - An Introduction To Vector Analysis For Physicists and Engineers-Springer Netherlands (1970)Fabiana Singh0% (1)
- Marine Propulsion Engine: Basic Engine Specifications PowerDocument2 pagesMarine Propulsion Engine: Basic Engine Specifications PowerSanket BhadaneNo ratings yet
- A Beginner's Tutorial For FE Modelling of Tubular Joints Using MSC - PatranDocument38 pagesA Beginner's Tutorial For FE Modelling of Tubular Joints Using MSC - Patranhfathollahi100% (1)
- Group Honesty Presentation On VariationDocument57 pagesGroup Honesty Presentation On VariationEjaz YusuffNo ratings yet
- Coordinate Systems For Industrial RobotsDocument3 pagesCoordinate Systems For Industrial RobotsLenaNo ratings yet
- IB Related RatesDocument8 pagesIB Related RatesVidhiGondaliaNo ratings yet
- M08 Apply Problem Solving TechniquesDocument153 pagesM08 Apply Problem Solving TechniquesEsu Rasu Esubal90% (10)
- Staad 4Document37 pagesStaad 4saisssms9116100% (2)
- Introduction To Catia V5: Learning ObjectivesDocument26 pagesIntroduction To Catia V5: Learning ObjectivesLiviu MihonNo ratings yet
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- Analysis of Babu and Odeh's Model PDFDocument143 pagesAnalysis of Babu and Odeh's Model PDFFABGOILMANNo ratings yet
- English Mathematics - 2022 Weekly Teaching Plan - Grade 9: Formal Assessment Task Revision and Formal Assessment TaskDocument6 pagesEnglish Mathematics - 2022 Weekly Teaching Plan - Grade 9: Formal Assessment Task Revision and Formal Assessment TaskThemba NyoniNo ratings yet
- 8 Nodes HexadronDocument21 pages8 Nodes HexadronMario Raul FreitasNo ratings yet
- Unit eDocument17 pagesUnit esoundu ranganathNo ratings yet
- Mathpower 12, Western EditionDocument22 pagesMathpower 12, Western EditionMawarniNo ratings yet
- 2017MATH 25pageDocument25 pages2017MATH 25pageJane XuNo ratings yet
- CharuDocument7 pagesCharuK. Sai Krishna Dora Class 8 E. Roll 37No ratings yet