Download as pdf or txt
You might also like
- Christine Piper - After Darkness (Extract)Document34 pagesChristine Piper - After Darkness (Extract)Allen & Unwin100% (3)
- Lower Extremity Reconstruction Plastic SurgeryDocument65 pagesLower Extremity Reconstruction Plastic SurgeryJuan MoscaNo ratings yet
- New Paccar MX 11 Euro 6 Engine EngDocument5 pagesNew Paccar MX 11 Euro 6 Engine Engddi1150% (2)
- Channel Reciprocity Calibration in TDD Hybrid Beamforming Massive MIMO SystemsDocument10 pagesChannel Reciprocity Calibration in TDD Hybrid Beamforming Massive MIMO SystemsBeenish HassanNo ratings yet
- Interference Analysis and Performance Evaluation For LTE TDD SystemDocument5 pagesInterference Analysis and Performance Evaluation For LTE TDD Systemsayeh haghiNo ratings yet
- Cooperative FSO Systems Performance Analysis and Optimal Power AllocationDocument8 pagesCooperative FSO Systems Performance Analysis and Optimal Power AllocationAiman ThoriqNo ratings yet
- Derivation of OTFS Modulation From First PrinciplesDocument16 pagesDerivation of OTFS Modulation From First PrinciplesSuvra Sekhar DasNo ratings yet
- Hou2020 PDFDocument13 pagesHou2020 PDFSatish KumarNo ratings yet
- Universal-Filtered Multi-Carrier Technique For Wireless Systems Beyond LTEDocument6 pagesUniversal-Filtered Multi-Carrier Technique For Wireless Systems Beyond LTECarlos SilvaNo ratings yet
- Efficient Broadcasting With GuaranteedDocument12 pagesEfficient Broadcasting With GuaranteedKarthick LakshminarayananNo ratings yet
- Ieee sp2Document12 pagesIeee sp2Sridhar RameshNo ratings yet
- Selective DF Protocol For MIMO STBC BasedDocument17 pagesSelective DF Protocol For MIMO STBC BasedMehmet KibarNo ratings yet
- Filter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationsDocument14 pagesFilter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationskhananuNo ratings yet
- Modulation Schemes For Cognitive Radio in White Spaces: KeywordsDocument7 pagesModulation Schemes For Cognitive Radio in White Spaces: KeywordsmunaqanadiloNo ratings yet
- Achievable Diversity Orders of Decode-and-Forward Cooperative Protocols Over Gamma-Gamma Fading FSO LinksDocument12 pagesAchievable Diversity Orders of Decode-and-Forward Cooperative Protocols Over Gamma-Gamma Fading FSO LinksAiman ThoriqNo ratings yet
- Structured Compressive Sensing Based Superimposed Pilot Design in Downlink Large-Scale MIMO SystemsDocument3 pagesStructured Compressive Sensing Based Superimposed Pilot Design in Downlink Large-Scale MIMO SystemsFahd SaifNo ratings yet
- Performance Analysis of Massive MIMO For Cell-Boundary UsersDocument15 pagesPerformance Analysis of Massive MIMO For Cell-Boundary UsersFakhar AbbasNo ratings yet
- Gigabit DSLDocument4 pagesGigabit DSLSaumya SinghNo ratings yet
- FLSS: A Fault-Tolerant Topology Control Algorithm For Wireless NetworksDocument12 pagesFLSS: A Fault-Tolerant Topology Control Algorithm For Wireless NetworksSumit KumarNo ratings yet
- A Resource Allocation Strategy For Distributed MIMO Multi-Hop Communication SystemsDocument3 pagesA Resource Allocation Strategy For Distributed MIMO Multi-Hop Communication SystemsjagguwcNo ratings yet
- Intercarrier On OfdmDocument8 pagesIntercarrier On OfdmAnonymous uspYoqENo ratings yet
- Duplexing, Multiplexing, and Multiple Access: A Comparative Analysis For Mesh NetworksDocument7 pagesDuplexing, Multiplexing, and Multiple Access: A Comparative Analysis For Mesh NetworksDevyani ParleNo ratings yet
- 2020 Theoretical Performance BoundDocument5 pages2020 Theoretical Performance BoundweromNo ratings yet
- A Graph-Based Collision Resolution Scheme For Asynchronous Unsourced Random AccessDocument6 pagesA Graph-Based Collision Resolution Scheme For Asynchronous Unsourced Random AccessSantro ParkerNo ratings yet
- A New Framework in Filter Bank Multi Carrier Modulation With OQAMDocument7 pagesA New Framework in Filter Bank Multi Carrier Modulation With OQAMNourdine Prolecto MahamadNo ratings yet
- Block Frequency Spreading: A Method For Low-Complexity MIMO in FBMC-OQAMDocument5 pagesBlock Frequency Spreading: A Method For Low-Complexity MIMO in FBMC-OQAMMahmud Ja'afarNo ratings yet
- Article InterferenceDocument4 pagesArticle InterferencegreenisaNo ratings yet
- Mimo 10 PDFDocument7 pagesMimo 10 PDFanuranjan kansalNo ratings yet
- Modulation and Multiple Access For 5G Networks: Yunlong Cai, Zhijin Qin, Fangyu Cui, Geoffrey Ye Li, and Julie A. MccannDocument31 pagesModulation and Multiple Access For 5G Networks: Yunlong Cai, Zhijin Qin, Fangyu Cui, Geoffrey Ye Li, and Julie A. MccannsubuhpramonoNo ratings yet
- Filtered OFDM Systems, Algorithms and Performance Analysis For 5G and BeyondDocument14 pagesFiltered OFDM Systems, Algorithms and Performance Analysis For 5G and BeyondJose Antonio Bellido VargasNo ratings yet
- Rayleigh Fading Channel Via Deep Learning DoneDocument12 pagesRayleigh Fading Channel Via Deep Learning DonenubnajninNo ratings yet
- P1. Orthogonal Time Frequency Space ModulationPart I.....Document6 pagesP1. Orthogonal Time Frequency Space ModulationPart I.....BelgacemNo ratings yet
- On Massive MIMO Cellular Systems Resilience To Radar InterferenceDocument5 pagesOn Massive MIMO Cellular Systems Resilience To Radar InterferenceAparna MishraNo ratings yet
- Interleaved Orthogonal Frequency Division Multiplexing (IOFDM) SystemDocument11 pagesInterleaved Orthogonal Frequency Division Multiplexing (IOFDM) SystemAliAlissNo ratings yet
- Joint CSIT Acquisition Based On Low-Rank Matrix Completion For FDD Massive MIMO SystemsDocument4 pagesJoint CSIT Acquisition Based On Low-Rank Matrix Completion For FDD Massive MIMO Systemshendra lamNo ratings yet
- Papr Reduction and Bit Error Rate Evaluation in Ofdm System Using Hybrid TechniquesDocument19 pagesPapr Reduction and Bit Error Rate Evaluation in Ofdm System Using Hybrid TechniquesijansjournalNo ratings yet
- Duplexing Multiplexing and Multiple Access A Comparative Analysis For Mesh NetworksDocument7 pagesDuplexing Multiplexing and Multiple Access A Comparative Analysis For Mesh NetworksMaaz AwanNo ratings yet
- Multi-Hop MIMO Relay Networks: Diversity-Multiplexing Trade-Off AnalysisDocument22 pagesMulti-Hop MIMO Relay Networks: Diversity-Multiplexing Trade-Off AnalysisdgunduzNo ratings yet
- 2011-Performance Analysis of CFO Mitigation Algorithms in Asynchronous Cooperative OFDM CommunicationDocument6 pages2011-Performance Analysis of CFO Mitigation Algorithms in Asynchronous Cooperative OFDM Communicationshamganth kumarapandianNo ratings yet
- Time-Frequency Joint Sparse Channel Estimation For MIMO-OFDM SystemsDocument4 pagesTime-Frequency Joint Sparse Channel Estimation For MIMO-OFDM SystemsKarthik V KalyaniNo ratings yet
- Channel Estimation and Transmission For Intelligent Reflecting Surface Assisted THZ CommunicationsDocument7 pagesChannel Estimation and Transmission For Intelligent Reflecting Surface Assisted THZ Communicationschandan kumar sheemarNo ratings yet
- PrasadDocument6 pagesPrasadhimanshu.koley4897No ratings yet
- Vector 1Document20 pagesVector 1nessNo ratings yet
- Sum-Rate Maximization For Linearly Precoded Downlink Multiuser MISO Systems With Partial CSIT: A Rate-Splitting ApproachDocument15 pagesSum-Rate Maximization For Linearly Precoded Downlink Multiuser MISO Systems With Partial CSIT: A Rate-Splitting ApproachAhmet Sacit SümerNo ratings yet
- English 1Document7 pagesEnglish 1Souley TANKOANONo ratings yet
- Frequency Domain Packet Scheduling With MIMO For 3GPP LTE DownlinkDocument10 pagesFrequency Domain Packet Scheduling With MIMO For 3GPP LTE DownlinkviswakshaNo ratings yet
- Massive MIMO in The UL DL of Cellular Networks How Many Antennas Do We NeedDocument12 pagesMassive MIMO in The UL DL of Cellular Networks How Many Antennas Do We NeedsowNo ratings yet
- Exact and Approximated Outage Probability Analyses For Decode-And-Forward Relaying System Allowing Intra-Link ErrorsDocument10 pagesExact and Approximated Outage Probability Analyses For Decode-And-Forward Relaying System Allowing Intra-Link ErrorsAiman ThoriqNo ratings yet
- Ad Hoc NetworksDocument34 pagesAd Hoc NetworksRaghu JoshiNo ratings yet
- Minimizing End-to-End Delay A Novel Routing Metric For Multi-Radio Wireless Mesh NetworksDocument9 pagesMinimizing End-to-End Delay A Novel Routing Metric For Multi-Radio Wireless Mesh NetworksAwaisNo ratings yet
- A Constrained Maximum-SINR NBI-Resistant PDFDocument16 pagesA Constrained Maximum-SINR NBI-Resistant PDFSarsij MishraNo ratings yet
- A Column Generation Method For Spatial TDMA Scheduling in Ad Hoc NetworksDocument14 pagesA Column Generation Method For Spatial TDMA Scheduling in Ad Hoc Networksanons2472No ratings yet
- Self-Interference Cancellation For LTE-Compatible Full-Duplex SystemsDocument6 pagesSelf-Interference Cancellation For LTE-Compatible Full-Duplex SystemsRoshan RajuNo ratings yet
- 3D Beamforming - Performance Improvement For Cellular NetworksDocument20 pages3D Beamforming - Performance Improvement For Cellular NetworksxinlivuNo ratings yet
- Spray and Wait: An Efficient Routing Scheme For Intermittently Connected Mobile NetworksDocument8 pagesSpray and Wait: An Efficient Routing Scheme For Intermittently Connected Mobile NetworksRahul VasirajuNo ratings yet
- Inter-Cell Interference Modeling in LTE Systems - SpringerLinkDocument32 pagesInter-Cell Interference Modeling in LTE Systems - SpringerLinkalemuNo ratings yet
- 3LTE PHY LayerDocument15 pages3LTE PHY LayerMohamed Ayman Abdel Alim AboellylNo ratings yet
- Electrical Power and Energy Systems: SciencedirectDocument15 pagesElectrical Power and Energy Systems: SciencedirectAlexander SanchezNo ratings yet
- Performance of Ad Hoc Routing Protocols in Urban EnvironmentsDocument7 pagesPerformance of Ad Hoc Routing Protocols in Urban EnvironmentsshehzadrizwanNo ratings yet
- 03 Nissel 2016 Enabling Low Complexity MIMO in FBMC OQAM.Document6 pages03 Nissel 2016 Enabling Low Complexity MIMO in FBMC OQAM.Mahmud Ja'afarNo ratings yet
- Optimal Soft Frequency Reuse and Dynamic Sub-Carrier Assignments in Cellular OFDMA NetworksDocument10 pagesOptimal Soft Frequency Reuse and Dynamic Sub-Carrier Assignments in Cellular OFDMA NetworksBudi Agus SetiawanNo ratings yet
- An Efficient Beamforming Design For Multipair Full Duplex Rel - 2017 - ICT ExpreDocument5 pagesAn Efficient Beamforming Design For Multipair Full Duplex Rel - 2017 - ICT ExpreEvgenia PetkovaNo ratings yet
- J Suscom 2017 08 001Document17 pagesJ Suscom 2017 08 001Nabiel KmNo ratings yet
- Weighted Clustering: September 2011Document9 pagesWeighted Clustering: September 2011Nabiel KmNo ratings yet
- Interference Mitigation in D2D Communication Underlaying LTE-A NetworkDocument21 pagesInterference Mitigation in D2D Communication Underlaying LTE-A NetworkNabiel KmNo ratings yet
- 222 996 1 PBDocument8 pages222 996 1 PBNabiel KmNo ratings yet
- PAPER D2D Inband InterferenceDocument6 pagesPAPER D2D Inband InterferenceNabiel KmNo ratings yet
- A Survey On Interference Management For Device-to-Device (D2D) Communication and Its Challenges in 5G NetworksDocument22 pagesA Survey On Interference Management For Device-to-Device (D2D) Communication and Its Challenges in 5G NetworksNabiel KmNo ratings yet
- Mathematical Characteristics of Uplink and Downlink Interference Regions in D2D Communications Underlaying Cellular NetworksDocument16 pagesMathematical Characteristics of Uplink and Downlink Interference Regions in D2D Communications Underlaying Cellular NetworksNabiel KmNo ratings yet
- Coverage and Interference in D2D Networks With Poisson Cluster ProcessDocument4 pagesCoverage and Interference in D2D Networks With Poisson Cluster ProcessNabiel KmNo ratings yet
- J Jnca 2018 02 014Document33 pagesJ Jnca 2018 02 014Nabiel KmNo ratings yet
- Handover Performance Analysis For Managing D2D Mobility in 5G Cellular NetworksDocument13 pagesHandover Performance Analysis For Managing D2D Mobility in 5G Cellular NetworksNabiel KmNo ratings yet
- D2D Neighborhood Discovery by A Mobile DeviceDocument6 pagesD2D Neighborhood Discovery by A Mobile DeviceNabiel KmNo ratings yet
- An Online Resource Allocation Algorithm To Minimize System Interference For Inband Underlay D2D CommunicationsDocument15 pagesAn Online Resource Allocation Algorithm To Minimize System Interference For Inband Underlay D2D CommunicationsNabiel KmNo ratings yet
- Interference Minimization in D2D Communication Underlaying Cellular NetworksDocument14 pagesInterference Minimization in D2D Communication Underlaying Cellular NetworksNabiel KmNo ratings yet
- What Is Galactic Evolution?: Milky WayDocument12 pagesWhat Is Galactic Evolution?: Milky WayPROF RAJESH DUBEYNo ratings yet
- Modbus Protocol Start Address Hex Ø Ø Ø: Input RegistersDocument8 pagesModbus Protocol Start Address Hex Ø Ø Ø: Input RegistersMannNo ratings yet
- The Yoga Sutras of PatanjaliDocument23 pagesThe Yoga Sutras of Patanjaliapi-3736105No ratings yet
- Touch Not The CatDocument1 pageTouch Not The CatNoor Azni Abdul AzizNo ratings yet
- Cifra Club - Debbie Gibson - Lost in Your EyesDocument3 pagesCifra Club - Debbie Gibson - Lost in Your Eyesnivaldo de oliveira OliveiraNo ratings yet
- AC 43.13-1B Section 5 Penetrant InspectionDocument8 pagesAC 43.13-1B Section 5 Penetrant Inspection320338100% (1)
- Gma1!2!2015 ContinutDocument64 pagesGma1!2!2015 ContinutSon HoangNo ratings yet
- F-760-001 HACCP PlanDocument3 pagesF-760-001 HACCP PlanglennysNo ratings yet
- Factsheet - REPowerEU PDFDocument2 pagesFactsheet - REPowerEU PDFconor farrellNo ratings yet
- Readers Theater For Grade OneDocument9 pagesReaders Theater For Grade OneglaidzNo ratings yet
- 4000-5000 Hand 6 Udg Juni 2006 UKDocument24 pages4000-5000 Hand 6 Udg Juni 2006 UKZvonimir IvisicNo ratings yet
- CSJ HydraulicDocument43 pagesCSJ HydraulicВаня БойкоNo ratings yet
- Assignment 2Document15 pagesAssignment 2NOOR HALIZA BINTI ALI (HMELAKA)No ratings yet
- 2020-11 Product Data Sheet LiOH TG CMP PDFDocument5 pages2020-11 Product Data Sheet LiOH TG CMP PDFSergey GlazzNo ratings yet
- MSW Report PDFDocument98 pagesMSW Report PDFSupritha KNo ratings yet
- Aspen Mho Mho4Document12 pagesAspen Mho Mho4Giovani ScarpatiNo ratings yet
- 2022 Damat (Co Author) Kajian Aktivitas Antioksidan Mi BasahDocument15 pages2022 Damat (Co Author) Kajian Aktivitas Antioksidan Mi BasahDamatNo ratings yet
- Soal Bhs Ing RafiDocument7 pagesSoal Bhs Ing RafidarmawanNo ratings yet
- Zeta Tray Icms 3Document13 pagesZeta Tray Icms 3Sebin KvNo ratings yet
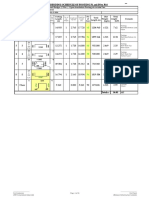
- BBS of All Pier Foundations of MAYARDocument16 pagesBBS of All Pier Foundations of MAYARAmanjot Singh0% (1)
- Biology Investigatory Reproductive HealthDocument12 pagesBiology Investigatory Reproductive HealthSubath KumarNo ratings yet
- Rms Polytechnic: Prepared By: Priyanka PatelDocument35 pagesRms Polytechnic: Prepared By: Priyanka PatelBhaumik ParmarNo ratings yet
- Agricultural Engineering Comprehensive Board Exam Reviewer Volume II - 1Document29 pagesAgricultural Engineering Comprehensive Board Exam Reviewer Volume II - 1Alfredo CondeNo ratings yet
- Alg 1 HWPDocument184 pagesAlg 1 HWPHaad MahmoodNo ratings yet
- Tagburos FinalDocument46 pagesTagburos FinalZiedwrick Ayson DicarNo ratings yet
- Lesson Plan 2 WeeblyDocument5 pagesLesson Plan 2 Weeblyapi-176731501No ratings yet
- Fardin & Roksana Ecological Disturbance PresentationDocument10 pagesFardin & Roksana Ecological Disturbance PresentationZahid khanNo ratings yet