Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AppNote 10831 Zero Orientation Cad Library IPC 7351BDocument24 pagesAppNote 10831 Zero Orientation Cad Library IPC 7351BgiorgioviNo ratings yet
- 4G New Site Verification Report (Functionality Test)Document13 pages4G New Site Verification Report (Functionality Test)Eko SurachmanNo ratings yet
- Sample Exam 1 EE 210Document6 pagesSample Exam 1 EE 210doomachaleyNo ratings yet
- 1 s2.0 S1364032122005639 MainDocument27 pages1 s2.0 S1364032122005639 MainHugo GalvánNo ratings yet
- Project On Maglev Train Class 12Document30 pagesProject On Maglev Train Class 12vishwhaajeaayNo ratings yet
- Epsolar: User ManualDocument20 pagesEpsolar: User ManualPepe LeivaNo ratings yet
- 8551G309 AscoDocument7 pages8551G309 AscoBrian YangNo ratings yet
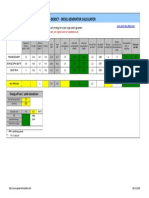
- Calculator Energy Genset Diesel Electric GeneratorDocument1 pageCalculator Energy Genset Diesel Electric GeneratorarunNo ratings yet
- Lecture 16 FM TX RCX DemosDocument19 pagesLecture 16 FM TX RCX DemosAhmad Jamal Khan JadoonNo ratings yet
- Insulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeDocument17 pagesInsulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeOlavo FelterNo ratings yet
- Eg2110 D2Document4 pagesEg2110 D2Hannan AfifiNo ratings yet
- Active Versus Passive DevicesDocument6 pagesActive Versus Passive DevicesSneha BandhaviNo ratings yet
- Electronics Devices and Circuits Semiconductor Diodes: P-N Junction Semiconductor DiodeDocument7 pagesElectronics Devices and Circuits Semiconductor Diodes: P-N Junction Semiconductor Diodehamid shah100% (1)
- Edc PPT2Document50 pagesEdc PPT2Mohan PreethNo ratings yet
- A Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaDocument36 pagesA Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaargaNo ratings yet
- Audio Steganography Using Tone Insertion TechniqueDocument5 pagesAudio Steganography Using Tone Insertion TechniqueATSNo ratings yet
- How To Design Your Own Inverter TransformerDocument4 pagesHow To Design Your Own Inverter Transformerkshyder67% (3)
- HHH 6Document20 pagesHHH 6Royce SumagaysayNo ratings yet
- DS-KD8003-IME1 Video Intercom Module Door Station: Key FeatureDocument4 pagesDS-KD8003-IME1 Video Intercom Module Door Station: Key FeatureYakerWalidNo ratings yet
- Aec Lab ManualDocument17 pagesAec Lab ManualprofharishjoshiNo ratings yet
- NS-10M - The 1978 Original, Bob Clearmountain VersionDocument1 pageNS-10M - The 1978 Original, Bob Clearmountain VersionDemetrius BrazNo ratings yet
- 7035te Manual de InstalacionDocument10 pages7035te Manual de InstalacionJose Antonio Acosta OrtizNo ratings yet
- HBT 2Document23 pagesHBT 2Sandeep KalpiNo ratings yet
- 제9차전력수급기본계획 9th Basic PlanDocument109 pages제9차전력수급기본계획 9th Basic PlanjiayiNo ratings yet
- Wimax SeminarDocument32 pagesWimax SeminarPuspala Manojkumar100% (1)
- Sho PDFDocument1 pageSho PDFĐức QuyềnNo ratings yet
- Q.Peak Duo Xl-G9.3: Enduring High PerformanceDocument2 pagesQ.Peak Duo Xl-G9.3: Enduring High Performancesteven6diaz-2No ratings yet
- VM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressDocument1 pageVM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressMiguelNo ratings yet
- Fixed Resistor:: Electrical Components & Power SuppliesDocument4 pagesFixed Resistor:: Electrical Components & Power SuppliesMohammad TahaNo ratings yet
- GCE Physics B: Unit H157/01: Foundations of Physics Advanced Subsidiary GCEDocument15 pagesGCE Physics B: Unit H157/01: Foundations of Physics Advanced Subsidiary GCEDaniel KirovNo ratings yet