Download as pdf or txt
You might also like
- Econometrics by Example 2nd Edition Gujarati Solutions ManualDocument9 pagesEconometrics by Example 2nd Edition Gujarati Solutions ManualCurtisVelezfsdzr100% (17)
- Gauss-Siedel Method: Civil Engineering Majors Authors: Autar KawDocument37 pagesGauss-Siedel Method: Civil Engineering Majors Authors: Autar KawKuna KunavathiNo ratings yet
- Keccak Implementation 3.1Document51 pagesKeccak Implementation 3.1asena visionNo ratings yet
- 10 1 1 108 40 PDFDocument62 pages10 1 1 108 40 PDFNguyễn Bùi CươngNo ratings yet
- Pirs702 Egsnrc CodesDocument97 pagesPirs702 Egsnrc CodesDiana MihailescuNo ratings yet
- Ltu Ex 06284 Se PDFDocument48 pagesLtu Ex 06284 Se PDFkediteheNo ratings yet
- Keccak Implementation 3.2Document59 pagesKeccak Implementation 3.2Nur AlamNo ratings yet
- Digital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYDocument19 pagesDigital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYRana DastgirNo ratings yet
- SDR802.11n ThesisDocument50 pagesSDR802.11n ThesisBoyan SotirovNo ratings yet
- Apostila Eletronica Potencia IFRN Zona NorteDocument133 pagesApostila Eletronica Potencia IFRN Zona NorteCaioNo ratings yet
- DVB-T Seminar Topic 7: Frame Building: Carsten Presser February 13, 2006Document17 pagesDVB-T Seminar Topic 7: Frame Building: Carsten Presser February 13, 2006dan r.No ratings yet
- FULLTEXT02Document76 pagesFULLTEXT02Zoro ZoroNo ratings yet
- Building A C Based ProcessorDocument68 pagesBuilding A C Based ProcessorRafik InoudjalNo ratings yet
- Electrical Validation For DDR Io Interface: Internship ReportDocument55 pagesElectrical Validation For DDR Io Interface: Internship ReportYeshoda MallikarjunaNo ratings yet
- APOSTILA CLP AutomacaoDocument97 pagesAPOSTILA CLP AutomacaoLuiz wagner barata de sáNo ratings yet
- Ttester enDocument125 pagesTtester enDiego García MedinaNo ratings yet
- T TesterDocument132 pagesT TesterEdu Kees MorelloNo ratings yet
- EE380 LabmanualDocument95 pagesEE380 LabmanualsekinNo ratings yet
- Lab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurDocument95 pagesLab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT Kanpurrakheep123No ratings yet
- Lab Manual For Control Lab PDFDocument95 pagesLab Manual For Control Lab PDFrakheep123No ratings yet
- Inverted Pendulum Stability Regarding Bandwidth and Center of MassDocument72 pagesInverted Pendulum Stability Regarding Bandwidth and Center of MassAnand SivakumarNo ratings yet
- Self Parking RobotDocument49 pagesSelf Parking RobotAndrei OlaruNo ratings yet
- Manual ARM Microcontroller Course E.T.S.V. Scintilla: Cursuscommissie May 27, 2015Document36 pagesManual ARM Microcontroller Course E.T.S.V. Scintilla: Cursuscommissie May 27, 2015Jonathan JaegerNo ratings yet
- Lab 3Document29 pagesLab 3EngrAbdulQaderNo ratings yet
- Tesis Sillen NordlundDocument66 pagesTesis Sillen Nordlundgabrielchanchi4529No ratings yet
- Laser Sensor RS485 Interface Design and Tire DOT Code Scanner Software DevelopmentDocument101 pagesLaser Sensor RS485 Interface Design and Tire DOT Code Scanner Software DevelopmentIman AmirtaheriNo ratings yet
- Complete Manual For AVR Multi-Tester Version 1.12kDocument128 pagesComplete Manual For AVR Multi-Tester Version 1.12kBenjamin Dover100% (1)
- Faceplate WinCC Analog enDocument77 pagesFaceplate WinCC Analog enazizdelNo ratings yet
- UNIVERSI A DEGLI STUDI DI PARMA High SpeDocument156 pagesUNIVERSI A DEGLI STUDI DI PARMA High SpeCarlos ManuelNo ratings yet
- YAC - Yet Another CORDIC Core: March 30, 2014Document16 pagesYAC - Yet Another CORDIC Core: March 30, 2014Ahmed HamoudaNo ratings yet
- Gr29rapport2021 02Document50 pagesGr29rapport2021 02Ibrahim NshimiyimanaNo ratings yet
- Sg2002 TRM enDocument918 pagesSg2002 TRM enhnxfugchlmiwztohglNo ratings yet
- ViewDocument136 pagesViewiraguz1No ratings yet
- Lab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurDocument91 pagesLab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurSatyajit SahooNo ratings yet
- Technical Report PIRS-702 Rev BDocument94 pagesTechnical Report PIRS-702 Rev BSUBHANo ratings yet
- User ManualDocument44 pagesUser Manualarness22No ratings yet
- Ofdm ThesisDocument128 pagesOfdm ThesisRohini SeetharamNo ratings yet
- Ltu Ex 2013 41654696Document142 pagesLtu Ex 2013 41654696Arash ShamsNo ratings yet
- Software Defined Radio Over CudaDocument87 pagesSoftware Defined Radio Over CudaDharmesh PanchalNo ratings yet
- Autosar ThesisDocument57 pagesAutosar ThesisKamal SubediNo ratings yet
- Half Subcarrier ShiftDocument104 pagesHalf Subcarrier ShiftSrikanth ChintalaNo ratings yet
- Kinetis SDK v.1.3 Demo Applications User's GuideDocument329 pagesKinetis SDK v.1.3 Demo Applications User's GuideKhuyến TrângNo ratings yet
- ITkPix Electrical QCDocument27 pagesITkPix Electrical QCdrapNo ratings yet
- Tyler Moody ThesisDocument82 pagesTyler Moody ThesisPrateek KambojNo ratings yet
- 2006 Santhosh - ReportDocument33 pages2006 Santhosh - ReportMohamed Hechmi JERIDINo ratings yet
- User Manual of Emergy SimulatorDocument36 pagesUser Manual of Emergy SimulatoryirleyNo ratings yet
- Ms3pro Manual 1.4.1Document316 pagesMs3pro Manual 1.4.1Alexandre Gandra CarvalhoNo ratings yet
- TOFPET2 ASIC SIPM Readout System - Software User Guide v2022.08Document43 pagesTOFPET2 ASIC SIPM Readout System - Software User Guide v2022.08LuNo ratings yet
- Primavera MonitorDocument23 pagesPrimavera MonitorDaniel Augusto Theran UribeNo ratings yet
- ELEX 7660: Digital System Design Project Report Automatic Garage Door OpenerDocument18 pagesELEX 7660: Digital System Design Project Report Automatic Garage Door OpenerMert KaratasNo ratings yet
- Anti Collision Mechanism in VehiclesDocument39 pagesAnti Collision Mechanism in VehiclesMuhammad QasimNo ratings yet
- Intel386 psABI 1.1Document64 pagesIntel386 psABI 1.1sNo ratings yet
- Mbsguide PDFDocument48 pagesMbsguide PDFsonu_manjhiNo ratings yet
- Machine Learning BasicsDocument68 pagesMachine Learning BasicsABHISHEK KUMBHARNo ratings yet
- Risc V Asm ManualDocument138 pagesRisc V Asm ManualALI HAIDERNo ratings yet
- System V Application Binary Interface AMD64 Architecture Processor SupplementDocument128 pagesSystem V Application Binary Interface AMD64 Architecture Processor SupplementradiumtauNo ratings yet
- Ktechlab: George John 11 June, 2007Document39 pagesKtechlab: George John 11 June, 2007Skain RkNo ratings yet
- Verilog Program Examples Using Iverilog and Gtkwave: September 2021Document50 pagesVerilog Program Examples Using Iverilog and Gtkwave: September 2021Shirsendu AcharyyaNo ratings yet
- VLSI Implementation of Block Error Correction Coding TechniquesDocument54 pagesVLSI Implementation of Block Error Correction Coding TechniquesHemant RajkumarNo ratings yet
- SEC 1: Elliptic Curve Cryptography: Tandards For Fficient RyptographyDocument98 pagesSEC 1: Elliptic Curve Cryptography: Tandards For Fficient Ryptographysujak34No ratings yet
- Usher_2007_231Document80 pagesUsher_2007_231calyphxooNo ratings yet
- Adobe Interview Experience and QuestionsDocument3 pagesAdobe Interview Experience and QuestionsGovind TripathiNo ratings yet
- Unit III FIR Filter DesignDocument89 pagesUnit III FIR Filter DesignBp PbNo ratings yet
- System Identification - WikipediaDocument3 pagesSystem Identification - WikipediaRicardo VillalongaNo ratings yet
- 10.1007@978 1 4842 5316 8Document652 pages10.1007@978 1 4842 5316 8hubner janampa100% (1)
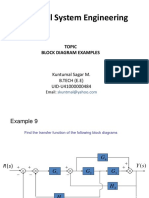
- Control System Engineering: Topic Block Diagram ExamplesDocument42 pagesControl System Engineering: Topic Block Diagram ExamplesjpatrNo ratings yet
- 15ME81 or Module 2Document34 pages15ME81 or Module 2prashanth prabhu100% (1)
- DSP Lab Experiment 09 - Group 02 - eDocument11 pagesDSP Lab Experiment 09 - Group 02 - eSayed MahmudNo ratings yet
- Thermodynamics and Statistical Mechanics BooksDocument3 pagesThermodynamics and Statistical Mechanics Bookskarthiknanotech20090% (1)
- 2019-20 CSE C & T QB Unit 3 (De of First and Second Order)Document1 page2019-20 CSE C & T QB Unit 3 (De of First and Second Order)Guru RockzzNo ratings yet
- Gujarat Technological University: Computer Engineering Machine Learning SUBJECT CODE: 3710216Document2 pagesGujarat Technological University: Computer Engineering Machine Learning SUBJECT CODE: 3710216Er Umesh ThoriyaNo ratings yet
- PH4401 04 Identical ParticlesDocument28 pagesPH4401 04 Identical Particlesseda öztürkNo ratings yet
- (IJCST-V7I3P19) :aishwarya Prabha Kumar, Aiswarya Milton Lopez, Akhila Anjanan, Aneena ThereesaDocument5 pages(IJCST-V7I3P19) :aishwarya Prabha Kumar, Aiswarya Milton Lopez, Akhila Anjanan, Aneena ThereesaEighthSenseGroupNo ratings yet
- 3D Limit Equilibrium Slope StabilityDocument9 pages3D Limit Equilibrium Slope StabilityBoris Leal MartinezNo ratings yet
- DSP AiDocument113 pagesDSP AiAli AhmadNo ratings yet
- 4-181030-Practice Drawing Involute Gear Using MathematicaDocument15 pages4-181030-Practice Drawing Involute Gear Using MathematicaPradita FirmansyahNo ratings yet
- @vtucode - in Model Paper 2018 Scheme Set 2 DBMSDocument3 pages@vtucode - in Model Paper 2018 Scheme Set 2 DBMSAstra DemonNo ratings yet
- Backpropagation: TA: Yi WenDocument39 pagesBackpropagation: TA: Yi WenTrần Văn DuyNo ratings yet
- NCC Group Olm Cryptogrpahic Review 2016 11 01Document27 pagesNCC Group Olm Cryptogrpahic Review 2016 11 01Ahmed sengabNo ratings yet
- Ch2 - Fundamental of Deep LearningDocument33 pagesCh2 - Fundamental of Deep LearningĐặng Anh KhoaNo ratings yet
- NMCE Lecture PlanDocument1 pageNMCE Lecture PlanSatyam TiwariNo ratings yet
- The Method of Integration by Partial FractionsDocument10 pagesThe Method of Integration by Partial FractionsJohn Rofer CabantingNo ratings yet
- Introduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToDocument7 pagesIntroduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToroseNo ratings yet
- Pid Tuning ReportDocument48 pagesPid Tuning ReportNurul SyaheerahNo ratings yet
- L01Document8 pagesL01Minh NhậtNo ratings yet
- CH 5 Digital Modulation - GATE - CourseDocument43 pagesCH 5 Digital Modulation - GATE - CourseDikesh ShresthaNo ratings yet
- Multi Point ConstraintsDocument53 pagesMulti Point ConstraintsAmanda SmithNo ratings yet
- Module-1 Part-3 CryptographyDocument15 pagesModule-1 Part-3 CryptographyRahulNo ratings yet
- Example Problems On Support Vector Machines: Problem 1Document2 pagesExample Problems On Support Vector Machines: Problem 1Karishma JaniNo ratings yet