Download as pdf or txt
You might also like
- WSJ - Wall Street Journal WeekendDocument54 pagesWSJ - Wall Street Journal WeekendNelsonynelsonNo ratings yet
- EberleinDocument4 pagesEberleinnemesis262No ratings yet
- Lunar: GE HealthcareDocument41 pagesLunar: GE HealthcareJhon LopezNo ratings yet
- The Redcliffe Aero Club Student Training Manual V4.0Document265 pagesThe Redcliffe Aero Club Student Training Manual V4.0Yousif AL Ayoubi100% (1)
- Lecture 22qwDocument26 pagesLecture 22qwGourav GuptaNo ratings yet
- Ee 1 For LMS ProblemsDocument1 pageEe 1 For LMS ProblemsFord MacatangayNo ratings yet
- LESSON 4 - General Transport EquationsDocument4 pagesLESSON 4 - General Transport EquationsPamela MendozaNo ratings yet
- Payment Payment: Gateway OrchestrationDocument18 pagesPayment Payment: Gateway OrchestrationGeorges Axel100% (1)
- Int QuestionsDocument11 pagesInt Questionssankush phatarpekarNo ratings yet
- Hana Bednarova - The Killer Outreach Email That Gets Opened, Replied To and Mainly Gains LinksDocument83 pagesHana Bednarova - The Killer Outreach Email That Gets Opened, Replied To and Mainly Gains LinksAmit RajNo ratings yet
- 1.operations ResearchDocument37 pages1.operations ResearchKalana JayewardeneNo ratings yet
- Script Pega Tudo BySam BloxDocument2 pagesScript Pega Tudo BySam BloxBSB GADO100% (1)
- l13 ProgressDocument1 pagel13 Progresshobby lamaNo ratings yet
- 351-Article Text-684-1-10-20200715Document18 pages351-Article Text-684-1-10-20200715Sri Widya AstutiNo ratings yet
- 178imguf EngineeringDocument20 pages178imguf EngineeringSANJEET KUMARNo ratings yet
- 2023 Master Strategic PlanDocument29 pages2023 Master Strategic Plankkingston128_1647400No ratings yet
- TM T800 E02 (Thailand)Document4 pagesTM T800 E02 (Thailand)Sherif AzizNo ratings yet
- A Research Study On Awareness of Fintech Among MillennialsDocument28 pagesA Research Study On Awareness of Fintech Among MillennialsVrutika ShahNo ratings yet
- Rhes Ann PDFDocument2 pagesRhes Ann PDFmarlonNo ratings yet
- Important Data - CSE WikiDocument14 pagesImportant Data - CSE Wikiआशुतोष मिश्राNo ratings yet
- Gaussian TipsDocument70 pagesGaussian Tips顧浩No ratings yet
- Matrix Eternity Technical Specifications Brochure En-1Document6 pagesMatrix Eternity Technical Specifications Brochure En-1G k bhargavaNo ratings yet
- Withdrawal Due To Superannuation IncapacitationDocument6 pagesWithdrawal Due To Superannuation IncapacitationPUNAM RNDNo ratings yet
- SuratDocument378 pagesSuratSpartacus CaesarNo ratings yet
- Draft Paper - How Was Sexuality Used To Control Women in Colonial Spanish South AmericaDocument19 pagesDraft Paper - How Was Sexuality Used To Control Women in Colonial Spanish South AmericaNyala NauwelaersNo ratings yet
- Global Commitment 2021 Progress ReportDocument39 pagesGlobal Commitment 2021 Progress ReportPedro MentadoNo ratings yet
- Class ProgramDocument5 pagesClass ProgramAIZA PANGANIBAN-CUARESMANo ratings yet
- LogDocument30 pagesLogWdwune BrendanNo ratings yet
- District-Wise List of PS UPS Secondary Sr. Secondary Schools in RajasthanDocument30 pagesDistrict-Wise List of PS UPS Secondary Sr. Secondary Schools in RajasthanSu KoshNo ratings yet
- PCWB-2316 FLXL Black N100-IdDocument4 pagesPCWB-2316 FLXL Black N100-IdFindora InternusaNo ratings yet
- MiaTavola MenuFA Food-Feb 2022Document2 pagesMiaTavola MenuFA Food-Feb 2022Jerry TomNo ratings yet
- Xe 90Document116 pagesXe 90Servicios IndustriaNo ratings yet
- ETIKA MENJENGUK ORANG SAKIT PpaiDocument25 pagesETIKA MENJENGUK ORANG SAKIT PpaiMurni Indah SariNo ratings yet
- Chemistry in An Estuary Combined Teacher StudentDocument33 pagesChemistry in An Estuary Combined Teacher StudentGlobal FactsNo ratings yet
- Cint LK TW Iv 2020Document98 pagesCint LK TW Iv 2020edi_wsNo ratings yet
- SS Linden Brochure - WebDocument28 pagesSS Linden Brochure - Websushil aroraNo ratings yet
- XCOM 2 Tech TreeDocument1 pageXCOM 2 Tech Treecahaya subuhNo ratings yet
- Group 4Document23 pagesGroup 4JELO GULLENo ratings yet
- Lessons Learned From State-Level Climate Policies To Accelerate US Climate ActionDocument9 pagesLessons Learned From State-Level Climate Policies To Accelerate US Climate ActionThe Wilson CenterNo ratings yet
- Ae 15-1990-15-Shiferaw Bekele-Wärä Seh MäsfenateDocument24 pagesAe 15-1990-15-Shiferaw Bekele-Wärä Seh MäsfenatetamiratNo ratings yet
- 2022 Bermuda School Sports Federation's Primary Zone SportsDocument10 pages2022 Bermuda School Sports Federation's Primary Zone SportsAnonymous UpWci5No ratings yet
- Fundcard ShriramEquityandDebtOpportunitiesDocument4 pagesFundcard ShriramEquityandDebtOpportunitiesYogi173No ratings yet
- FIN302 Report PDFDocument22 pagesFIN302 Report PDFgaja babaNo ratings yet
- Doh AuditDocument38 pagesDoh AuditJeremy TurleyNo ratings yet
- Development of An Improved Earthing Method For Power and Distribution Transformers SubstationsDocument7 pagesDevelopment of An Improved Earthing Method For Power and Distribution Transformers Substationsmajed al.madhajiNo ratings yet
- The Rand-Tac InformationDocument116 pagesThe Rand-Tac InformationMurat GunayNo ratings yet
- DSC - Merit List - MatiariDocument25 pagesDSC - Merit List - MatiariNiaz KhasKheliNo ratings yet
- BSC Recognised List - FINY30Document57 pagesBSC Recognised List - FINY30Lokesh RaoNo ratings yet
- Basic Mechanics-167 Unit2 Force&MomentDocument71 pagesBasic Mechanics-167 Unit2 Force&MomentFoxelt ManingNo ratings yet
- BibliographyDocument4 pagesBibliographyJoshua FloranoNo ratings yet
- Mohit Sharma Vertical HeadDocument3 pagesMohit Sharma Vertical HeadKriday SharmaNo ratings yet
- Nichols Brosch W Urst W Olfe: MtowerDocument10 pagesNichols Brosch W Urst W Olfe: Mtowerthe next miamiNo ratings yet
- BADB1014 Quantitative Methods - Lesson 3Document23 pagesBADB1014 Quantitative Methods - Lesson 3PrashantNo ratings yet
- Evening Street Review Number 33Document180 pagesEvening Street Review Number 33Barbara Bergmann0% (1)
- 2016 ModelX LHD SOP3Document73 pages2016 ModelX LHD SOP3qusayNo ratings yet
- Https Onetimeregn - Haryana.gov - in PrintApp - AspxDocument3 pagesHttps Onetimeregn - Haryana.gov - in PrintApp - AspxYogita TanwarNo ratings yet
- Paper 3 (Emerald)Document16 pagesPaper 3 (Emerald)anubha srivastavaNo ratings yet
- 01torgle IJSMMrDocument15 pages01torgle IJSMMrOmarcito 3No ratings yet
- Hempel Topaz SG Enamel 524ME MsdsDocument10 pagesHempel Topaz SG Enamel 524ME MsdsM.FAIZAN ARSHADNo ratings yet
- Naeem Gulzar ProfileDocument5 pagesNaeem Gulzar ProfileZaki Abbas SheikhNo ratings yet
- 14 Cbsnews FBI-policeDocument5 pages14 Cbsnews FBI-policeCBS NewsNo ratings yet
- OSY MicroprojectDocument23 pagesOSY MicroprojectIrshad ShaikhNo ratings yet
- SG Agif Prospectus enDocument488 pagesSG Agif Prospectus endeepkisorNo ratings yet
- Formulário - 2017 - 2018 PDFDocument2 pagesFormulário - 2017 - 2018 PDFSilva JoãoNo ratings yet
- Solution:: V 105m S S 62m T 0Document50 pagesSolution:: V 105m S S 62m T 0Yousif AL Ayoubi100% (1)
- Answers - Tutorial Sheet 5 Optimisation 1Document1 pageAnswers - Tutorial Sheet 5 Optimisation 1Yousif AL AyoubiNo ratings yet
- Volume 01 Principles of FlightDocument303 pagesVolume 01 Principles of FlightYousif AL AyoubiNo ratings yet
- Crescent Bahümán Limited: Mechanical UtilitiesDocument10 pagesCrescent Bahümán Limited: Mechanical UtilitiesTayyaba RahimNo ratings yet
- AP PGECET Electrical Engg (EE) 2015 Question Paper & Answer KeyDocument16 pagesAP PGECET Electrical Engg (EE) 2015 Question Paper & Answer Keypavani88% (8)
- Design Two Phase SeperatorsDocument8 pagesDesign Two Phase SeperatorsabhmarsNo ratings yet
- EE-103: Electrical Engineering: Chap:6 (Part I) CapacitorsDocument27 pagesEE-103: Electrical Engineering: Chap:6 (Part I) CapacitorsZarak KhanNo ratings yet
- Deltabar Pmd75 User Manual0Document80 pagesDeltabar Pmd75 User Manual0Morteza alizadehNo ratings yet
- STPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsDocument9 pagesSTPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsSouseiseki ChromeNo ratings yet
- Formal Lab Report - Work and EnergyDocument4 pagesFormal Lab Report - Work and Energyapi-270086937No ratings yet
- S.L. Dixon and Cesare Hall (Auth.) - Fluid Mechanics and Thermodynamics of Turbomachinery-Butterworth-HeinDocument3 pagesS.L. Dixon and Cesare Hall (Auth.) - Fluid Mechanics and Thermodynamics of Turbomachinery-Butterworth-Heinsamarsinghai26No ratings yet
- Mitsubishi Power, Ltd. - Power Plants: Gas Turbine Combined Cycle (GTCC) Power PlantsDocument2 pagesMitsubishi Power, Ltd. - Power Plants: Gas Turbine Combined Cycle (GTCC) Power PlantsKR PANo ratings yet
- Pseudo ForceDocument8 pagesPseudo Forcesudhindra975% (8)
- Yuasa NP10-6Document1 pageYuasa NP10-6Lumaksono WirastomoNo ratings yet
- Independent University, Bangladesh (IUB) : Experiment No: 04 Experiment Name: Parallel DC Circuit ObjectiveDocument4 pagesIndependent University, Bangladesh (IUB) : Experiment No: 04 Experiment Name: Parallel DC Circuit ObjectiveMahfuz KhanNo ratings yet
- Buchholz Relay: General SpecificationsDocument2 pagesBuchholz Relay: General SpecificationsRamez YassaNo ratings yet
- Grid Connected PVDocument16 pagesGrid Connected PVLEON SOTNASNo ratings yet
- 9702 s10 QP 12Document24 pages9702 s10 QP 12Hubbak KhanNo ratings yet
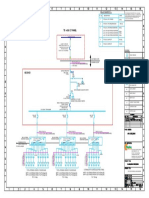
- 604.5kW - John Deere - Dewas - SLD - R1-RCC ROOF-LT SLD PDFDocument1 page604.5kW - John Deere - Dewas - SLD - R1-RCC ROOF-LT SLD PDFaks2205No ratings yet
- Chapter 14: Kinematics of A Particle - Work and EnergyDocument91 pagesChapter 14: Kinematics of A Particle - Work and EnergysritaranNo ratings yet
- Pressure in Flowing FluidsDocument10 pagesPressure in Flowing FluidsIan SorzNo ratings yet
- b2. Partial Discharge Detector - Akil Electronics - PDC 13Document7 pagesb2. Partial Discharge Detector - Akil Electronics - PDC 13Harshvardhan ShahNo ratings yet
- Device MaterialsDocument9 pagesDevice Materialstejas chikhlikarNo ratings yet
- D.E 6rd EditionDocument33 pagesD.E 6rd EditionkenNo ratings yet
- Testing Procedures For Preventive Maintenance of Electrical EquipmentDocument100 pagesTesting Procedures For Preventive Maintenance of Electrical EquipmentReynante T. BitasNo ratings yet
- N Detailed Modelling PDFDocument32 pagesN Detailed Modelling PDFhussain100% (1)
- CXC Physics P1 June 2017Document15 pagesCXC Physics P1 June 2017gefegNo ratings yet
- Lecture 5 - CMOS Transistor TheoryDocument44 pagesLecture 5 - CMOS Transistor Theorysadia santaNo ratings yet
- 3U HSC Questions by TopicDocument69 pages3U HSC Questions by TopicDanielNo ratings yet
- SJPO Special Round 2011 Sample PDFDocument10 pagesSJPO Special Round 2011 Sample PDFziwei_from_chinaNo ratings yet