Download as doc, pdf, or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingRating: 4.5 out of 5 stars4.5/5 (2)
- Advantages of GroundingDocument3 pagesAdvantages of GroundingNabarunSarma100% (1)
- Project Sharjah Higher Colleges of Technology: Electrical Power Distribution (ELE-4333)Document5 pagesProject Sharjah Higher Colleges of Technology: Electrical Power Distribution (ELE-4333)Nida NiaziNo ratings yet
- The Essentials of Overcurrent Protection You Are Not Allowed To ForgetDocument18 pagesThe Essentials of Overcurrent Protection You Are Not Allowed To ForgetMiguel Alfredo Perez OrtizNo ratings yet
- Earthing of Electrical SystemsDocument48 pagesEarthing of Electrical SystemsDaveDuncan100% (5)
- Types of Neutral Earthing in Power DistributionDocument10 pagesTypes of Neutral Earthing in Power DistributionHimdad TahirNo ratings yet
- Types of Neutral Earthing in Power DistributionDocument8 pagesTypes of Neutral Earthing in Power DistributionedwardoNo ratings yet
- Types of Neutral Earthing in Power DistributionDocument8 pagesTypes of Neutral Earthing in Power Distributionedwardo100% (1)
- Types of Neutral Earthing in Power Distribution - Electrical NotesDocument15 pagesTypes of Neutral Earthing in Power Distribution - Electrical Notessudipta_kolNo ratings yet
- 27-1. General Grounding SystemsDocument6 pages27-1. General Grounding SystemsmhramNo ratings yet
- Neutral Grounding Types OkDocument8 pagesNeutral Grounding Types OkAditya AstariNo ratings yet
- Types of Neutral Earthing in Power Distribution (Part 1)Document5 pagesTypes of Neutral Earthing in Power Distribution (Part 1)Humaid Shaikh100% (1)
- System Neutral GroundingDocument4 pagesSystem Neutral GroundingVENKATESAN RNo ratings yet
- Types of Neutral Earthing in Power Distribution Part 2Document7 pagesTypes of Neutral Earthing in Power Distribution Part 2shoham985No ratings yet
- Ground Fault ProtectionDocument15 pagesGround Fault ProtectionEmilio PortelaNo ratings yet
- Types of Neutral Earthing in Power Distribution Part 1Document4 pagesTypes of Neutral Earthing in Power Distribution Part 1shoham985No ratings yet
- Neutral Ungrounded: This Protective Measure Offers Many Advantages Over An Ungrounded System, LikeDocument5 pagesNeutral Ungrounded: This Protective Measure Offers Many Advantages Over An Ungrounded System, LikeMaria Mircea100% (1)
- System Neutral GroundingDocument11 pagesSystem Neutral GroundingRoldzday DurezaNo ratings yet
- Joseph SeminarDocument33 pagesJoseph SeminarEdul BrianNo ratings yet
- Abel Emmanuel-2Document13 pagesAbel Emmanuel-2joshbinmollel112No ratings yet
- NGR Technical GuideDocument11 pagesNGR Technical Guideali_naghibNo ratings yet
- Power System GroundingDocument27 pagesPower System Groundingeafeilat100% (1)
- CT 124004Document8 pagesCT 124004zisis81No ratings yet
- The Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading PrinciplesDocument9 pagesThe Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading Principlesfredhalder99No ratings yet
- System Neutral EarthingDocument70 pagesSystem Neutral Earthingsorry2qazNo ratings yet
- Application Considerations For High Resistance Ground Retrofits in Pulp and Paper MillsDocument8 pagesApplication Considerations For High Resistance Ground Retrofits in Pulp and Paper MillsLong LeoNo ratings yet
- ELEC9713-11 Lec07 EarthingDocument54 pagesELEC9713-11 Lec07 Earthinggolu100% (1)
- Resistance Earthed Systems: Fault CurrentsDocument25 pagesResistance Earthed Systems: Fault CurrentsRameez Ahmed100% (1)
- Generator Earthing and Stator Earth Fault ProtectionDocument9 pagesGenerator Earthing and Stator Earth Fault ProtectionYousif_AbdalhalimNo ratings yet
- Denmark UniversityDocument6 pagesDenmark Universityle hoai NamNo ratings yet
- GROUNDINGDocument43 pagesGROUNDINGmuaz_aminu1422No ratings yet
- Good Grounding Practices: A Brief Introduction To The Basics of Electrical Grounding For Power SystemsDocument24 pagesGood Grounding Practices: A Brief Introduction To The Basics of Electrical Grounding For Power SystemsdevcharuNo ratings yet
- Good Grounding PracticesDocument24 pagesGood Grounding PracticesSanjeev Dhariwal100% (1)
- Good Grounding Practices: A Brief Introduction To The Basics of Electrical Grounding For Power SystemsDocument24 pagesGood Grounding Practices: A Brief Introduction To The Basics of Electrical Grounding For Power SystemshazimeNo ratings yet
- Effective Bonding GroundingDocument9 pagesEffective Bonding GroundingEdwinNo ratings yet
- System GroundingDocument26 pagesSystem GroundingEyad A. FeilatNo ratings yet
- Earthing System - Maintenance: Engineer Abid AzizDocument22 pagesEarthing System - Maintenance: Engineer Abid AzizTariq Mir100% (2)
- Earthing in Electric Systems - EbookDocument8 pagesEarthing in Electric Systems - EbookElectrotechnikNo ratings yet
- Generator Earthing and Stator Earth Fault ProtectionDocument17 pagesGenerator Earthing and Stator Earth Fault ProtectionjosehenriquezsotoNo ratings yet
- Grounding Practices in Industrial Distribution Systems Avtron Loadbank, IncDocument8 pagesGrounding Practices in Industrial Distribution Systems Avtron Loadbank, Incrabahyamer8273No ratings yet
- Hartmann 2019Document23 pagesHartmann 2019juanNo ratings yet
- Power SystemDocument14 pagesPower SystemGaetano Gaetano100% (1)
- Grounding System MethodsDocument5 pagesGrounding System MethodsgaxyvNo ratings yet
- System Neutral Resistance GroundingDocument7 pagesSystem Neutral Resistance GroundingadhyarthaNo ratings yet
- Types of Neutral Earthing in Power Distribution (Part 1) - EEPDocument5 pagesTypes of Neutral Earthing in Power Distribution (Part 1) - EEPNguyễn Phi TriềuNo ratings yet
- High Voltage Busbar Protection R1Document45 pagesHigh Voltage Busbar Protection R1ali ahmadNo ratings yet
- Abel Emmanuel 1Document13 pagesAbel Emmanuel 1joshbinmollel112No ratings yet
- High Voltage Busbar ProtectionDocument45 pagesHigh Voltage Busbar ProtectionabhinavksauravNo ratings yet
- Protection Basics Jan-2012Document38 pagesProtection Basics Jan-2012Eli Siyaha100% (2)
- Question No. 1: What Are The Advantages and Disadvantages of The Various GroundingDocument7 pagesQuestion No. 1: What Are The Advantages and Disadvantages of The Various Groundingraza239No ratings yet
- E04-027 - Grounding System Theory and Practice - USDocument33 pagesE04-027 - Grounding System Theory and Practice - USMarinos GounaridisNo ratings yet
- White Paper 2009 System Neutral Resistance Grounding LBDocument7 pagesWhite Paper 2009 System Neutral Resistance Grounding LBLong LeoNo ratings yet
- Grounding ABCDDocument8 pagesGrounding ABCDdipenkhandhediyaNo ratings yet
- High Resistance GroundingDocument6 pagesHigh Resistance GroundingpecampbeNo ratings yet
- Abstract of 3phase RectifierDocument3 pagesAbstract of 3phase RectifierKishanKumarYadavNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- BCS ManualDocument24 pagesBCS ManualNandgulabDeshmukhNo ratings yet
- CMRI Manual: CMRI Genius Manual Wallaby Metering Systems Pvt. LTDDocument11 pagesCMRI Manual: CMRI Genius Manual Wallaby Metering Systems Pvt. LTDNandgulabDeshmukhNo ratings yet
- A Natural History of RapeDocument252 pagesA Natural History of RapeNandgulabDeshmukhNo ratings yet
- MSEDCL ABT - Disaplay Parameter For WALLABYDocument3 pagesMSEDCL ABT - Disaplay Parameter For WALLABYNandgulabDeshmukhNo ratings yet
- BCS User Manual - V1.9Document59 pagesBCS User Manual - V1.9NandgulabDeshmukhNo ratings yet
- Daksh BCS: Operation and Instruction ManualDocument8 pagesDaksh BCS: Operation and Instruction ManualNandgulabDeshmukhNo ratings yet
- CMRI Manual For SANDS CMRI Model - DMRI-1006Document1 pageCMRI Manual For SANDS CMRI Model - DMRI-1006NandgulabDeshmukhNo ratings yet
- AlphaMeterUserManual-with S1 PanelDocument28 pagesAlphaMeterUserManual-with S1 PanelNandgulabDeshmukhNo ratings yet
- Sands Mri Preparation & Reading Manual For DMRI-1006 (New VerDocument6 pagesSands Mri Preparation & Reading Manual For DMRI-1006 (New VerNandgulabDeshmukhNo ratings yet
- A M U M: Lpha Eter Sers Anual INE 900 013 DUDocument28 pagesA M U M: Lpha Eter Sers Anual INE 900 013 DUNandgulabDeshmukhNo ratings yet
- Phase A Low Voltage EventsDocument3 pagesPhase A Low Voltage EventsNandgulabDeshmukhNo ratings yet
- Sands MRI File Transfer For A1800 Meters MRIDocument6 pagesSands MRI File Transfer For A1800 Meters MRINandgulabDeshmukhNo ratings yet
- A1800 User Manua (Short)Document14 pagesA1800 User Manua (Short)NandgulabDeshmukhNo ratings yet
- TRANSDUCER PHYLOSOPHY1 ModelDocument1 pageTRANSDUCER PHYLOSOPHY1 ModelNandgulabDeshmukhNo ratings yet
- A1800 Meter ManualDocument141 pagesA1800 Meter ManualNandgulabDeshmukhNo ratings yet
- Transformer Tap Position IndicatorDocument1 pageTransformer Tap Position IndicatorNandgulabDeshmukhNo ratings yet
- Oti & Wti AdptDocument1 pageOti & Wti AdptNandgulabDeshmukhNo ratings yet
- Uts 1110aDocument2 pagesUts 1110aNandgulabDeshmukhNo ratings yet
- Islanding of 24-Bus IEEE Reliability Test SystemDocument16 pagesIslanding of 24-Bus IEEE Reliability Test SystemRahul_KittuNo ratings yet
- Generator Automatic Voltage Regulator: Operation ManualDocument6 pagesGenerator Automatic Voltage Regulator: Operation ManualGonzalo DoniniNo ratings yet
- Design and Research On The LCL Filter in Three-Phase PV Grid-Connected InvertersDocument4 pagesDesign and Research On The LCL Filter in Three-Phase PV Grid-Connected InvertersJong Hee LeeNo ratings yet
- FcmaDocument4 pagesFcmaAnonymous vcadX45TD7No ratings yet
- Schedule of Loads & Design Analysis: @restaurant: KFC PB Load Current Total Load CurrentDocument1 pageSchedule of Loads & Design Analysis: @restaurant: KFC PB Load Current Total Load Currentmarinel martinNo ratings yet
- Acti9 Command and Control 2013Document128 pagesActi9 Command and Control 2013radostingNo ratings yet
- Resistance Earthed Systems: Fault CurrentsDocument25 pagesResistance Earthed Systems: Fault CurrentsRameez Ahmed100% (1)
- EE313 Class9Document13 pagesEE313 Class9Zahid MarwatNo ratings yet
- ACDC - Problem-ChildDocument5 pagesACDC - Problem-ChildJean CUADNo ratings yet
- 12V Battery Charger-cum-Variable Power SupplyDocument11 pages12V Battery Charger-cum-Variable Power SupplyLOLO ISMUNASIBNo ratings yet
- EG4® 18kPV Version 1 External RSD Initiator Install InstructionsDocument9 pagesEG4® 18kPV Version 1 External RSD Initiator Install InstructionsAlan ZorkotNo ratings yet
- Hybrid Power SystemDocument31 pagesHybrid Power SystemAnil Kumar67% (9)
- Bill of Supply For Electricity: Area Details Connection Details Supply and Meter DetailsDocument2 pagesBill of Supply For Electricity: Area Details Connection Details Supply and Meter DetailspkNo ratings yet
- Rhenes ACB PDFDocument11 pagesRhenes ACB PDFRojan RegmiNo ratings yet
- Power GridDocument7 pagesPower GridKrishna PremeeNo ratings yet
- One Word AnsDocument65 pagesOne Word Ansss_chinniNo ratings yet
- Introduction To Power System Analysis: Node Equations: The Bus Admittance MatrixDocument19 pagesIntroduction To Power System Analysis: Node Equations: The Bus Admittance MatrixSaikat MahmudNo ratings yet
- E1 - Controlled Rectifiers PDF NotesDocument84 pagesE1 - Controlled Rectifiers PDF NotesSatyanarayana Gurram100% (1)
- 8315 FaDocument24 pages8315 FatanmaysutariaNo ratings yet
- C1000D6RGDocument4 pagesC1000D6RGDavid GomezNo ratings yet
- Battery Isolator GT InstructionsDocument12 pagesBattery Isolator GT InstructionsThales Davanzo RomioNo ratings yet
- SOLTEK SOLAR POWER Specification and PriceDocument4 pagesSOLTEK SOLAR POWER Specification and PriceAlexis MalicdemNo ratings yet
- Afd (VFD and Short Circuit)Document1 pageAfd (VFD and Short Circuit)WRAI0% (1)
- Power Plant Engineering Question PapersDocument7 pagesPower Plant Engineering Question PapersADITYANo ratings yet
- 318BL Renr2922Document2 pages318BL Renr2922rodineiNo ratings yet
- Ziaurrehman CVDocument3 pagesZiaurrehman CVEngr Zia UR RehmanNo ratings yet
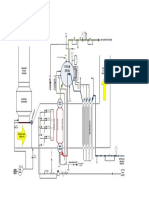
- HRSG File Visio.Document1 pageHRSG File Visio.San DiNo ratings yet
- 3 2 GIZ17 XXX Presentation Sandip SharmaDocument49 pages3 2 GIZ17 XXX Presentation Sandip SharmaAdel KlkNo ratings yet
- Woodward Easygen-3000 Series ManualDocument770 pagesWoodward Easygen-3000 Series ManualJimmy F HernandezNo ratings yet